如果要說名字朗朗上口、通俗好記的人形機器人核心零部件公司,巨蟹智能一定能排到前三。
毗鄰太湖賦予了巨蟹智能獨特的文化內涵。據巨蟹智能創始人趙偉博士回憶,2019年公司產品生產落地之時,恰逢西風響,蟹腳癢的吃蟹黃金季,於是在這種「巨人之上,諧行天下」的美好願景裏,江蘇智能制造領域誕生了這樣一家非常具有代表性的企業。
2019年起步以來,巨蟹智能瞄準零部件研制商定位,持續立足於使用者需求,透過以諧波減速機和關節模組為核心,短短5年就成長為江蘇省重點智能制造企業,擁有了5000平米研制基地,並掌握原材料、熱處理、加工工藝、設計仿真等上下遊關鍵技術。
人形機器人新領域如火如荼後,巨蟹智能也快速發力並已經取得一定成績。在首屆中國人形機器人產業大會上,巨蟹智能就帶來了多樣化的一體化關節模組,展現了其在人形機器人領域的新技術成果。未來人形機器人需要哪些關鍵零部件技術?機器人大講堂獨家采訪到了巨蟹智能創始人趙偉博士,他為我們詳細介紹了在人形機器人關節模組上的思考。

▍人形並沒有太多不同
在巨蟹智能看來,從傳統諧波減速機到人形機器人關鍵部件,需求邏輯並沒有發生本質變化,產品的研發路徑也有跡可循。
機器人大講堂了解到,過去5年面向行業、緊抓需求的過程中,巨蟹智能其實已經服務過醫療、軍工、半導體、3C、鋰電、光伏等十余個行業,打造過上遊零部件、制造中遊模組等多種產品。在這種過程中,巨蟹智能的做法就是嘗試尋找多產品之間的核心共性需求,逐步打造成為一個能搭建各類零部件解決方案的平台型公司。
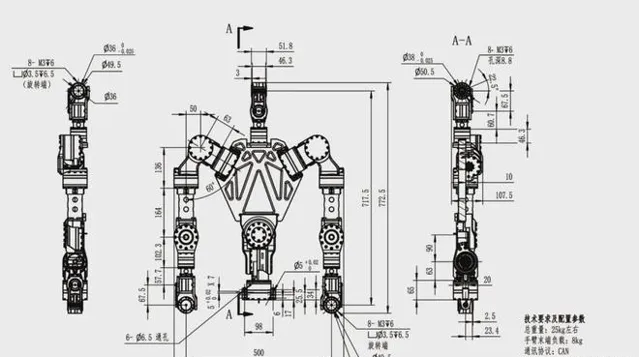
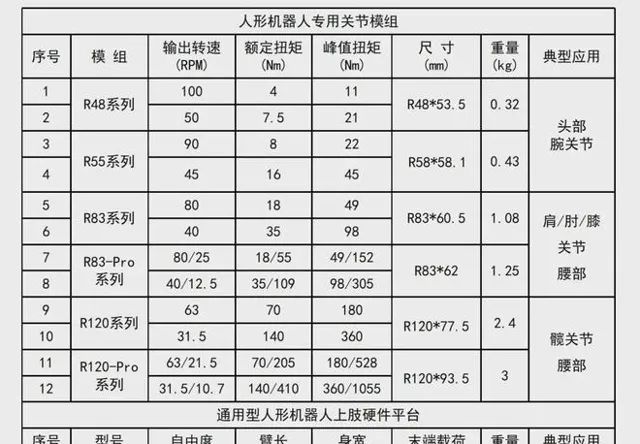
在此前首屆中國人形機器人產業大會上,機器人大講堂註意到,巨蟹智能就展出了頭部腕關節、肩/時/膝關節、髖關節腰部的11個序列人形機器人零部件方案,巨蟹智能也成為了國內目前能提供最全人形機器人零部件矩陣的企業。
趙博士對機器人大講堂透露,面向人形機器人行業,在共性產品平台的基礎上,圍繞行業方案實作針對化需求開發,這是巨蟹智能能夠很快針對人形機器人實作部件系列化的重要原因。
在趙博士看來,目前人形機器人產業鏈的發展階段非常類似早期汽車產業鏈,整體增速較高但野蠻生長,未來必然隨著行業成長、企業成長,會在車型、部件要求上形成區別,這意味著企業必然需要實作分化和分工協作。
例如人形機器人未來可能會進入工廠搬運重物,也可能需要能夠穿針引線,這對於零部件的大小、定位精度都有著不盡相同的要求,關節模組的需求扭矩其實也需要從2Nm到400Nm,系列化需求非常明顯。

為此,在人形機器人這個路徑上,巨蟹智能的做法一直都是透過專註於人形機器人核心關鍵模組,圍繞人形機器人不同場景的工況和形態,針對柔性化、智能化、扭矩等細分的部件需求特性進行針對性開發,並快速形成如此多樣化的產品方案,未來一旦需求爬升,可以迅速進一步針對各場景需求,在方案上實作多形態化組合。
「超扁平型能夠替代人的腿部或腰部來輸出力量,非金屬樹脂材料能夠適應更加輕量化的需求。」趙博士指著展示中的產品一樣樣如數家珍,而這一樣樣產品都從需求中來,最後被打造成為不同類別的部件。
如今,巨蟹智能已經形成了從減速機到驅動再到編碼器的整合化、資訊化和小型化研發體系,同時還在底層零部件上擴大產品矩陣,解決工程問題,以求最大化滿足人形機器人各個部件的獨特效能,並為批次產能的大範圍降本做足準備。

▍一體化關節帶來更大創新空間
在傳統減速機領域,由於該類產品最初在美國發明,又在日本進行產業化,在幾個關鍵節點上,中國的諧波減速機產業都缺少參與。這導致了整個機器人產業在關鍵技術上受到掣肘。國內產品近年來雖然解決了一部份卡脖子問題,市占率穩步提升,但受限於工業母機的加工能力,整體精度、構型和產品升級的空間已經縮小,大突破需要時間。
基於這種認識,巨蟹智能所選擇重點突破的產品方向是一體化關節。作為新興技術產物,尤其是針對人形機器人的一體化關節,在結構設計、材料、客製化開發等方面基本都是從無到有的狀態,國內與國外處於同一起跑線,產品拓展潛力廣闊,這為零部件產商帶來了前所未有的市場「換道超車」機遇。
但開拓新領域必然也需要新能力。趙偉看到,想要滿足蓬勃發展的人形機器人市場,企業必然需要對傳統減速機針對性做出構型和產品形態的調整以及改變,這背後又對於企業的綜合設計能力、產品測試以及最佳化能力提出了全方位的要求。
「我們在基礎零部件的基礎上更進一步,開始針對場景的需求特性,研發不同部件的產品構型,例如胸部的關節以及肘部的關節,如何實作差異化,外觀、核心指標、構型設計,以及這種新形態產品研發後的剛性、精度、熱效率等核心指標能否滿足大批次生產和實際套用的壽命,巨蟹智能都進行了長時間的綜合驗證,才有了當下的成果。」趙博士解釋道。

不僅如此,將基礎零部件繼續做深做細也是當前巨蟹智能的創新思路。機器人大講堂註意到,由於以需求研發為導向,巨蟹智能能很快將場景特性將其變為工程語言,進行結構上的突破和最佳化。例如針對傳統減速機就存在高沖擊下可能會撕裂的問題,巨蟹智能就考慮到,傳統環境下該問題出現機率小,但對人形機器人而言就意味著極大的操作安全隱患,因此巨蟹智能透過機構創新,實作了過電氣保護,解決了這一細節問題。
而例如在關節模型上,巨蟹智能則考慮到人形機器人進行輕載高速和多載低速的特殊場景,為此,其在協同模組中融入了一組行星減速機,透過行星切換做到較高的變速比,從而讓機器人的動作柔順性更強,能在同等功耗下,既能夠適應大負載,也能夠去做輕載動作,兩者還能無縫切換,場景適應大幅提升。
「我們拜訪了國內幾乎所有人形機器人廠商,他們的演算法框架不同、場景多樣,我們整理了上百條細分需求,才梳理出這些更加實用且細化的產品解決方案。」趙博士說道。而正是這樣一個個小細節的積累、最佳化和解決,才使得如今巨蟹智能的一體化關節,做到了更加貼近使用者,貼近場景,更加符合人形機器人市場需求。
▍結語與未來
機器人核心零部件從設計、研發到制造,是一個漫長而艱辛的過程,需要足夠的耐力才有望慢工出細活。據機器人大講堂了解,在做好人形機器人軀幹這件事,巨蟹智能目前不僅在持續分析場景,快速響應,還在打牢著熱處理、虛擬仿真等設計、加工技術的基礎,並在嘗試實作供應鏈整合。
趙博士介紹,在巨蟹智能內部,目前形成了非常穩步的基礎研究和工程設計兩大架構,一方面嘗試快速捕捉機器人行業趨勢,並對核心零部件進行不斷的最佳化和創新,另一方面正在完善套用和測試環節,實作較為成熟的產業鏈閉環,從而進一步助力人形機器人本體企業縮短產品叠代周期。
巨蟹智能透露,目前其人形機器人關節已經升級到了第二代,計劃在6月份會釋出第三代關節。第三代關節和第二代關節比,在更小的體積下融入了力傳感器,從而使其能進行更多精細化運動感知和控制,能效比大為提升。
巨蟹智能還正在積極探索新型材料並嘗試與企業合作。例如樹脂等輕量化新型材料目前在全球範圍內已經顯示出了較為廣泛的可行性,巨蟹智能結合了諧波減速機鋼輪和柔輪的特殊性要求,形成了全新的材料配方,正在嘗試為人形機器人客製打造一款基於新材料開發的減速機。

同時,透過設計一些不同標準性的硬件部件模組,目前巨蟹智能還已經打造了一個人形機器人的硬件平台,積極融入人形機器人行業發展熱潮中,未來有望攜手更多演算法實力強的人形機器人企業同步進行硬件開拓。
這有點類似於最早索尼、蘋果公司和特斯拉的做法,如果市場情況優秀,非常有可能將企業和產業鏈標準進一步形成行業標準,從而真正幫助中國零部件企業沖出傳統減速機的卡脖子瓶頸,實作超越和領先。











