本文內容來源於【測繪學報】2024年第6期(審圖號GS京(2024)1198號)
遙感影像高可信智能不變檢測技術框架與方法實踐
寧曉剛 , , 張翰超 , , 張瑞倩
中國測繪科學研究院,北京 100036
基金專案
作者簡介
摘要
針對傳統變化檢測技術面臨的樣本類別不平衡、演算法適用性差和知識套用不足問題,本研究從逆向角度出發,提出了遙感影像高可信智能地類不變檢測技術框架。該框架透過智能化演算法準確提取各類任務均不感興趣的穩定不變區域,從而在實際套用中壓縮作業面積,提高生產效率。在數據預處理基礎上,根據不變檢測特點構建樣本庫,提出先驗資訊引導的全域-局部不變檢測方法消除整體性和局部性「偽變化」,形成格網化不變掩膜,並從精度和效率角度提出壓蓋準度和壓蓋振幅兩個物件級指標進行評價。在全國多個地區的實踐表明,該框架能夠在保證精度的同時大幅減少人工目視判讀工作量,顯著提升提取效率,為實際套用場景下的遙感變化資訊提取提供了全新範式。
關鍵詞
本文參照格式
寧曉剛, 張翰超, 張瑞倩. 遙感影像高可信智能不變檢測技術框架與方法實踐 [J]. 測繪學報, 2024, 53(6): 1098-1112 doi:10.11947/j.AGCS.2024.20230405
NING Xiaogang, ZHANG Hanchao, ZHANG Ruiqian.
閱讀全文
http://xb.chinasmp.com/article/2024/1001-1595/1001-1595-2024-06-1098.shtml
自然資源地表覆蓋變化資訊是自然資源管理的重要基礎性數據成果,在自然資源管理業務中發揮著不可替代的重要作用[1] 。在實際套用中,由於有著非常嚴格的成果管理要求,在自然資源調查監測業務中,為確保成果的準確性和可靠性,主要采用「人工目視解譯+外業調繪」的作業模式。以2016、2017、2018年全國基礎性地理國情監測專案為例,每年的圖斑數分別為2.65億、2.68億、2.73億,同期的全國土地利用變更遙感監測專案的圖斑數為127萬~130萬,數量非常龐大。由於需要人工提取大量的變化圖斑,上述作業模式的弊端凸顯:投入大、耗時長、效率慢、時效性較低,受主觀因素影響大[2] 。若從全國範圍、其他行業領域來看,遙感數據越來越多,分辨率越來越高,需求越來越細,套用量越來越大,技術水平提升迫在眉睫[3-4] 。地表覆蓋變化資訊提取作為政府實作自然資源科學管理的重要工作,傳統的作業模式已經很難滿足新時代國家治理體系和治理能力現代化的需求[5-7] ,因此,研發智能化演算法模型,實作資訊自動化處理賦能生產已成為一項重要課題[8] 。
人工目視解譯提取變化圖斑主要分為變化發現、圖斑勾繪和內容賦值3個環節,理想情況下利用語意變化檢測演算法能夠實作全部替代。然而,由於變化檢測演算法提取的圖斑邊界尚無法滿足高標準成果規範要求,大多數情況仍需人工修改或重新勾繪,另外當前語意變化檢測的語意類別精度偏低,仍需要全面的內容檢查和修改。因此,當前變化檢測演算法在圖斑勾繪和內容賦值環節尚無法替代人工,賦能生產的主要套用在於提升變化發現環節的作業效率。根據自然資源部公布的2022年、2023年中國自然資源公報數據統計,年度土地資源(含耕地、園地、林地、草地、濕地、城鎮村及工礦用地、交通運輸用地、水域及水利設施用地)的變化面積只占總面積的0.104 8‰,可見在實際自然資源高頻率的監測套用中,99.9%以上的區域都是未發生變化的區域。若能精準提取50%的未變化區域,便可直接提升1倍的變化發現效率。因此,研究如何精確提取未變化區域,壓縮變化發現環節的作業面積,對於提升人工生產效率極為關鍵。
1961年,Rosefeld首次用數碼化的偵察遙感影像開展自動變化檢測研究[9] 。此後,利用遙感影像進行變化檢測逐漸成為研究熱點。變化檢測是透過對同一目標或現象不同時間的觀測來確定其變化的處理過程[10] 。遙感變化檢測研究的目的是找出感興趣的變化資訊,濾除作為幹擾因素的不相幹的變化資訊[11] 。從20世紀80年代起,大量的變化檢測方法和模型開始湧現,不少專家學者進行了探索研究和總結歸納[12-16] ,變化檢測方法大體可分為像素比較法[17] 、物件導向法[18] 、機器學習法[19] 、深度學習法[20] 及混合類方法等。
像素比較法是以像素為基本單元,逐像素比較兩幅影像的不同,從而揭示變化資訊。像素比較法包括差值法[21] 、比值法[22] 、回歸分析法[23] 、影像變換法[24] 和分類後比較法[25] 等。這些方法具備操作簡單、處理速度快的特點,但無法準確確定變化的類別和性質。為克服基於像素的方法中出現的「同物異譜、同譜異物」問題,物件導向的變化檢測方法引起了廣泛關註。該類方法以物件為最小單元進行分析,首先透過物件導向的影像分割技術得到同質性物件,然後再進行變化檢測。物件導向的變化檢測主要包括直接物件比較法和物件類別比較法。直接物件比較法又包括馬爾科夫隨機場[26] 、條件隨機場[27] 等方法,物件類別比較法是指物件級分類後比較法[28] 。機器學習法相比於人工設計的演算法模型具有自動化程度高、適應力強等方面的優勢,能夠顯著提升變化檢測效能,主要包括決策樹[29] 、隨機森林[30] 、支持向量機[31] 和極限學習機[32] 等。這些方法主要透過影像預處理、影像特征提取、特征表達和分類器訓練等步驟來實作變化資訊提取。相比於直接像素比較法,這類方法加入了GIS資訊[33] 輔助遙感影像的分類,提升了變化檢測的精度和效率。隨著大數據和人工智能時代的到來,深度學習為變化檢測的發展註入了新活力。透過數據驅動的手段,深度學習方法可以有效挖掘數據特征,避免了人工特征設計與提取帶來的效率低等問題,這為遙感影像變化檢測提供了一條途徑。眾多學者將深度學習方法運用到變化檢測中,代表網絡有摺積神經網絡[34] 、深度置信網絡[35] 、自編碼網絡[36] 、生成對抗網絡[37] 、Transformer[38] 、遙感大模型等。
然而,現有深度學習變化檢測方法研究與套用面臨著3大難題:①變化樣本數量遠小於不變樣本數量導致的樣本類別不平衡難題;②傳感器成像、地物狀態變遷、套用場景需求多變等引起的演算法泛化難題;③業務化場景知識的利用不足導致的變化圖斑類別不清及邊界不準難題。隨著衛星遙感技術的不斷發展,資料來源將愈加豐富,觀測頻率將越來越高,套用場景將更加復雜多變,上述3類難題也將愈加突出。
從1961年至今,遙感影像變化檢測一直是遙感領域的研究熱點,近年來出現了很多方法,取得了長足進展。但利用遙感影像進行自然資源地表覆蓋變化檢測是一個極為復雜的問題。專家一致認為[13-14] ,目前沒有一種普遍適用的方法來解決該問題,也缺乏適用於自然資源調查監測實用化場景的自動辨識和變化檢測技術。其內在原因如下。
(1)遙感影像是地物在入射條件下的光譜反映,「同物異譜,同譜異物」現象普遍存在[39] 。因此,準確辨識地物天然存在難題。
(2)遙感影像類別多樣、成像條件各異,各類遙感影像的傳感器、光譜區間、分辨率、入射角、季節、光照條件均不盡相同[40] 。同時,各種主客觀條件引起資訊缺失,如遮蔽陰影、雲雪覆蓋、影像處理失當等[41] 。此外,地物狀態變遷引起「偽變化」,如林地、草地隨季節變化、結冰與消融、人造地表塗色更改等[42] 。
(3)地物變化客觀性與套用需求主觀性矛盾。地物狀態存在客觀性,而在實際套用中只提取關心的變化,即該變化為自訂的「變化」[43] ,由此造成部份客觀變化被忽略,部份微小變化被人為放大,使得統一的提取演算法從根本上難以適應復雜多變的實際需求。
面向數據類別多、監測範圍廣、下墊面情況千變萬化的自然資源調查監測實際套用場景,自動辨識和變化檢測技術無法全部滿足實際套用要求。區別於傳統變化檢測的一步式需求解決方案,本文提出不變檢測的技術框架和方法,將變化資訊提取需求分解為機器不變檢測和人工變化提取兩個步驟,即演算法負責處理簡單穩定的不變區域檢測辨識任務,人工負責處理復雜多變的變化目標提取任務,從而形成新的變化檢測範式,為實用化變化資訊提取提供新途徑,以期彌補變化檢測演算法進展與實際套用需求之間的差距。
1 不變檢測的概念和內涵
不變檢測從影像基本不變區域、因成像原因和地物狀態等造成的有一定規律的「偽變化」區域入手進行檢測,為地表覆蓋資訊更新問題開啟一扇新門,提供一個全新視角。
1.1 「變」與「不變」的剖析
遙感影像變化檢測是確定和分析目標區域的地物變化,廣義的地物變化類別主要包括地物類別、位置、範圍、形狀、狀態等。地物類別的變化指同一空間位置不同時相地物類別上的差異;地物位置的變化指不同時相的同一地物在空間位置上的差異;地物範圍的變化指地物所占空間或面積的擴張和縮小;地物形狀的變化指同一地物的外形在不同時間發生的變化;地物狀態的變化指地物隨著時間的推移而呈現出不同的形態。地物類別變化是最根本的變化,位置、範圍、形狀變化會連帶造成類別變化。狀態變化形式復雜多樣,在遙感變化檢測套用中通常不認為其屬於變化檢測範疇。
變是絕對的,不變是相對的。地表要素種類繁多,加之不同的變化檢測任務對變化的定義不同,導致地表要素「變」與「不變」的定義和概念不盡相同。遙感影像上「變化」的來源可分為成像條件不同引起的變化,陰影、遮擋、處理失真等引起的變化,地物狀態和類別變化3大類。在實際套用中,前兩類影像變化基本不被關註,一般認定為不變;地物類別變化更受關註,尤其是某些特定類別的地物類別變化(如新增建設用地、耕地非農化建設等),因此地物類別變化需要根據實際套用需求來確定是否屬於感興趣變化。變化檢測方法試圖透過用一個統一的閾值來實作「變」與「不變」的準確劃分,但由於變化情況的復雜性使得感興趣的變化內容與其他變化類別相互交織,實際中常陷入查準與查全難以兼顧的局面。
為便於厘清其中關系,將本文所梳理的「變」與「不變」的關系用圖、集合的數學語言來進行描述。 圖1(a) 中,變化集合為 C ,不變集合為 B ,變化與不變的理論分割線為 L ,全集為 U ,即 U = C ∪ B 。感興趣變化集合為 G , G ⊆ C ;不變檢測中關心的穩定不變為 W , W ⊂ B 。 G 1 , G 2 ,…, Gn 是一系列不同變化檢測任務感興趣變化的集合, G 是其併集, G ={ G 1 ∪ G 2 ∪…∪ Gn }。一般而言,每項具體任務感興趣變化的邊界是明確的,即 G 1 , G 2 ,…, Gn 中各自具有明確的邊界,但由於任務個數 n 的不確定性, G 是一個變化的集合。
圖1
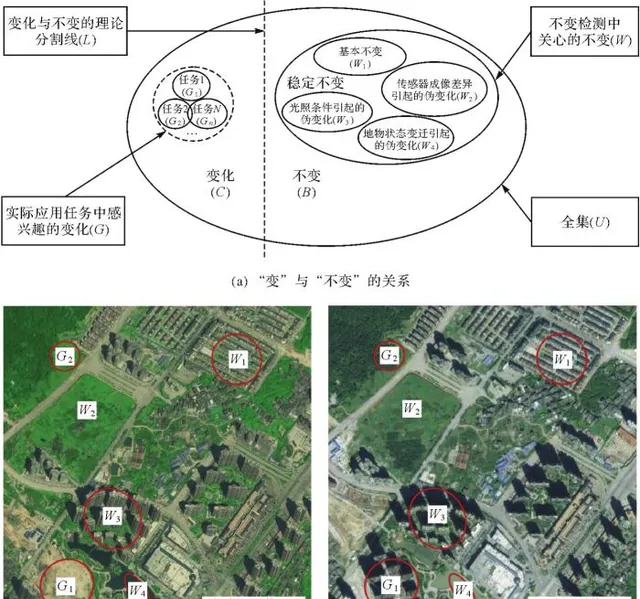
圖1 「變」與「不變」的關系與範例
Fig.1 The relationship and examples of 「change」 and 「unchange」
從科學視角來看,理論上存在變化與不變的分割線 L ,可透過輻射、結構等各種客觀角度進行科學的設計和論證來形成合理的劃分方案,由於涉及因素過多等原因,目前並未形成客觀可行的劃分標準。
從套用視角來看,每項具體任務的感興趣變化的邊界一般是明確的,即使用者想要提取的變化類別一般都有明確的劃分標準,但該標準多從需求角度定義,存在一定的主觀性。
從變化檢測研究現狀來看,在理論探討中,通常將「變」與「不變」當作一對概念來進行討論,對應 圖1 中的 C 和 B 。然而,在演算法研究中,由於需要得到明確的精度評價數值,其變化的定義服從測試數據的「真值」,而其測試數據的「真值」則多由套用視角的劃分標準得到,也就是將變化檢測任務具體化。如在提取新增建設用地任務( G 1 )中,會將耕地變為林地視為不變;在耕地非糧化監測任務( G 2 )中,則又將耕地變為林地視為變化。 表1 列舉了當前研究中常用的變化檢測數據集,從中可以看出不同的數據集對變化類別的定義差別較大,對應圖中 Gn 。
表1 變化檢測數據集對比
Tab.1 Change detection dataset comparison
| 數據集 | 分辨率/m | 變化類別 | 數據來源 | 分布地區 |
|---|---|---|---|---|
| SZTAKI[44] | 1.5 | 新建城區、建築作業、大批樹木種植、耕地變化等 | 航空數據+谷歌地球 | 匈牙利佩斯州紹道 |
| ABCD[45] | 0.4 | 建築物是否被沖走 | 航空數據 | 日本東北地區 |
| WHU building CDD[46] | 0.075 | 只關註建築物變化 | 航空數據 | 克賴斯特徹奇 |
| GZCD[47] | 0.55 | 只標記建築物變化 | 谷歌地球 | 廣州 |
| Lebedev-CD[48] | 0.03~1 | 考慮不同大小物件變化(建築物、道路、森林、汽車、樹木、坦克等) | 谷歌地球 | — |
| LEVIR-CD[49] | 0.5 | 只關註建築相關變化 | 谷歌地球 | 美國德薩斯州 |
| DSIFN-CD[50] | 2 | 關註土地覆蓋物件變化(道路、建築物、農田、水體等地物) | 谷歌地球 | 北京、成都、深圳、重慶、武漢、西安 |
| SYSU-CD[51] | 0.5 | 新建城市建築、郊區擴張、施工前的基礎工作、植被變化、道路擴建、海上建設等 | 航空數據 | 香港 |
| LIM-CD[52] | 0.5~2 | 新增建設用地變化(如住宅建築,工業、商業建設,公共、交通設施建設),特殊用途建築(水利、園林、綠化等) | 鑲嵌影像(15顆衛星) | 中國10個地形各異的省區市 |
新視窗開啟| 下載CSV
正是由於感興趣變化的不確定性,不變檢測思路從逆向角度出發,目的是找到各類變化檢測任務均不感興趣的類別,稱為「穩定不變」,對應 圖1 中 W ,主要包含基本不變( W 1 )和傳感器成像差異引起的偽變化( W 2 )、光照條件引起的偽變化( W 3 )、地物狀態變遷引起的偽變化( W 4 )。透過對「穩定不變」類別的精準檢測,排除不感興趣的不變區域,從而在各類實際套用中壓縮作業面積。
由 W 和 G 的含義可知, W 是客觀的,存在一定的規律性,如同一傳感器拍攝的影像在色彩和風格上具有一定的相似性。 G 隨人類感興趣目標而變化,具有一定主觀性和隨意性,如在耕地非農化、非糧化監測中,前期影像均為耕地,後期分別為灌溉後的水田和坑塘,兩者在影像上均表現為「水面」特征,而前者不認為是變化,後者卻被認為是變化。另外,由於 G 包含變化的整體範圍是變化的,難以形成通用的檢測演算法,而 W 的類別組成更加明確,可以形成通用的檢測演算法。因此,研究如何辨識穩定不變區域比直接辨識變化更加簡單,相對於現有變化檢測研究中主要關註演算法對「真值」 G 的提取,穩定不變 W 的提取演算法在落地套用方面有優勢,本文提出不變檢測思路使研究物件從 G 轉變為 W 。
1.2 不變檢測的概念
不變檢測是指提取各類變化檢測任務均不感興趣的穩定不變區域的過程。穩定不變區域主要包含基本不變和由傳感器成像差異、光照條件、地物狀態變遷引起的偽變化區域。
目前針對地表覆蓋不變檢測的研究還很少。有學者套用叠代加權多元變化檢測演算法提取未發生變化的像元作為特征像元用於變化檢測[53] ,也有學者透過利用不同時相SAR影像的不變資訊具有的相關性進行聯合分類變化檢測,減小分類累積誤差[54] 。這些研究雖然涉及影像不變資訊的運用,但並未將地表覆蓋不變檢測作為專門課題進行深入研究。
1.3 不變檢測的內涵
不變檢測可實作對傳統變化檢測理論的簡化,把變化檢測面臨的難題轉化為可解決或可規避的問題。第一,不變檢測將變化檢測「從影像變化推導地物變化」這一無法完全確定的難題簡化為「從影像不變推導地物不變」的可求解問題。在變化檢測中由成像條件差異等造成的大量偽變化問題,在不變檢測中將得以規避,且檢測精度更容易保證。第二,不變檢測的思路能夠很好地以「不變」規避地物實際變化與人類需求變化之間的邏輯混亂關系,只需找到前後時相影像的不變區域,此時地物不變的客觀性和任意套用對不變的定義是總體一致的。第三,不變檢測以減少人工目視解譯範圍為目的,在保證不變檢測在一定查準率水平的前提下,壓縮變化或可能變化區域的範圍,從根本上規避變化檢測對邊界精度的嚴苛要求。不變檢測的思路和概念示意圖如 圖2 所示。
圖2
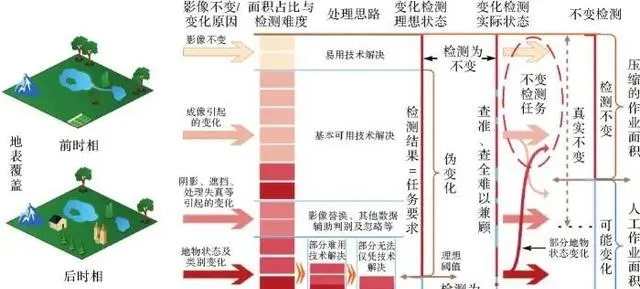
圖2 不變檢測的思路和概念示意圖
Fig.2 Ideas and concept maps of changeless detection
結合 圖1(b) 中的範例區域, 圖2 中的成像引起的變化是整體性的( W 2 ),這部份主要由於傳感器差異引起,具備系統性的規律,可以透過技術手段進行消除;去除這類偽變化後,大部份區域為影像不變( W 1 )區域,這類區域兩期影像的色彩、紋理基本上未發生變化,最易提取;另外,部份由於光照或拍攝角度變化引起陰影、遮擋等屬於資訊缺失,可以用影像替換、其他數據輔助判別等手段來進行解決;最為復雜的是地物狀態和類別變化,通常在自然資源地表覆蓋監測任務中,地物類別變化才認為是感興趣變化,而地物狀態變化則認為是不變,如 圖1(b) 中 G 1 區域新建了高層建築, G 2 區域由耕地變為了林地,實際套用中的感興趣變化與任務需求高度相關,在耕地非農化、非糧化監測中,需要提取 G 2 區域,不需要提取 G 1 區域,而新增建設用地監測則相反。而 W 4 區域只是水體的狀態發生了變化,實際地類並未變化,因此歸類為地物狀態引起的偽變化,這類區域通常與具體地物類別密切相關,具備局部性特征,可透過地物辨識分類技術解決。
2 不變檢測的技術框架
針對遙感影像變化檢測面臨的難題,基於變化區域面積遠小於不變區域面積這一假設前提,本文提出不變檢測理論與方法以實作對傳統變化檢測理論的延伸與發展,把變化檢測面臨的3大難題轉化為可解決或可規避的問題:①利用直推式影像回歸學習模型消除傳感器成像、地物狀態變遷等引起的影像上的「偽變化」,提取影像不變區域,此方法將變化檢測中「變化位置發現」步驟轉化為影像回歸,由於回歸模型訓練和預測皆為同一影像對,因此能夠突破傳統學習模型泛化能力的桎梏,解決演算法適用性難題;②利用影像分類/目標辨識方法對不變區域外的可能變化區域辨識篩選,在保證準確性的前提下進一步消除不感興趣的變化,縮小疑似變化區域範圍,此方法將變化檢測中「變化類別確定」步驟轉化為目標區域辨識分類問題,從而既降低了辨識分類的難度又避免了變化檢測演算法面臨的樣本類別不平衡問題;③從檢測區域本地數據中提取地類不變資訊及先驗知識,將疑似變化區域內部的復雜變化類別辨識和邊界提取由人工根據套用需求來完成,從而避免變化圖斑語意化邊界提取難題。由於3大難題的存在,當前變化檢測提取成果在位置精度、邊界規範性和內容精度方面均難以滿足生產需要。采用不變檢測-變化資訊提取新範式,將自動不變檢測與人工目視解譯相結合,能夠有效解決或規避變化檢測面臨的難題,實作技術的落地套用。演算法研究中,也可將不變檢測作為變化檢測的前置步驟,形成「不變檢測-變化檢測」的多階段檢測方案,用於提升變化檢測的最終效果,如多階段漸進式變化檢測方法[55] 。
2.1 技術流程與方法
不變檢測技術流程可分為數據預處理、不變檢測樣本庫構建、不變檢測技術方法、成果輸出與評價4個步驟,如 圖3 所示。
圖3
圖3 不變檢測技術流程框架
Fig.3 Technology process framework of changeless detection
2.2 數據預處理
數據預處理涵蓋多個步驟,如影像幾何糾正、配準、融合、鑲嵌、勻色、裁切等,這些步驟的主要目標是將遙感影像對在幾何位置、色彩特性和空間範圍方面進行標準化和最佳化,從而為後續的不變檢測任務創造有利的條件[56] 。影像正射糾正透過消除幾何失真,確保影像像素在地面上的精確位置,以保證變化檢測的精度和可靠性。配準操作則旨在將兩期影像對準,以便進行一致性比較。影像融合和鑲嵌則將多個來源影像融合成一個無縫的整體,以維持數據的連續性和一致性。勻色操作可以減少由於不同影像來源和光照條件引起的色彩差異,使得影像在色彩上更加一致。裁切步驟將影像調整到相同的空間範圍,確保後續處理過程的一致性。
2.3 不變檢測樣本庫構建
在基於深度學習開展遙感影像變化檢測任務時,樣本庫的質素直接影響模型的效能和穩健性,因此構建一個高質素的樣本庫至關重要[57] 。現有的遙感影像變化檢測公開數據集主要包括前時相影像、後時相影像、變化類別標簽3類檔。數據集涉及地區範圍相對較小,影像類別較為單一,主要構成為存在變化的樣本。相比而言,不變檢測樣本庫應具有以下特點:①為區分偽變化類別,增加了各類偽變化類別內容;②為體現地域特征,增加了影像地區內容;③為體現影像成像特征,增加了影像資料來源內容;④為體現各變化/偽變化類別數量分布情況,不以是否存在變化對樣本進行人為篩選。不變檢測樣本采集和樣本庫構建應在整理各類樣本備選源的基礎上,圍繞「偽變化」形成原因這一重點,考慮地形地域特色、傳感器特點、時相季相差異、尺度差別等對樣本進行分類劃分,構建具有層次性、區域性、時序性、尺度性、多樣性的地表覆蓋分類變化樣本。設計具有全面性、代表性、均衡性、時序性、尺度性的地表覆蓋要素樣本庫構建方案。
2.4 不變檢測技術方法
不變檢測技術方法的核心在於基於不變區域面積遠大於變化區域面積這一前提條件,將傳統變化檢測的重點從尋找感興趣變化區域轉移到辨識和分析穩定不變區域。根據 圖1 中穩定不變區域的主要構成,重點采用針對性演算法實作整體性和局部性偽變化的去除。整體性偽變化主要包括由於傳感器成像差異( W 2 )引起的整體性影像變化,局部性偽變化包括地物狀態變遷引起的偽變化( W 4 ),另外光照條件變化( W 3 )中光照強度差異引起的是整體性偽變化,而光照角度差異引起的是局部性偽變化,在演算法中分別進行處理。在傳統深度學習變化檢測方法中,這些偽變化常被統一視為不變的區域,並未針對它們進行明確的區分。因此,對於不同類別的偽變化的辨識準確度主要受制於數據集內偽變化類別的分布以及所采用的網絡模型,容易造成對各類偽變化辨識的適用性較差的問題。不變檢測則對不同的偽變化類別進行分別處理,具體方法可以有多種,本文提出一種先驗資訊引導的全域-局部不變檢測方法,該方法首先利用直推式影像回歸學習模型消除傳感器成像等整體性「偽變化」(對應 圖1(b) 中的 W 2 ),繼而提取絕大多數基本不變區域(對應 圖1(b) 中的 W 1 ),然後利用先驗資訊驅動的特征聚合異常分析方法消除部份地物狀態變化等局部性「偽變化」(對應 圖1(b) 中的 W 4 ),最終得到不變檢測結果。具體技術路線如 圖4 。
圖4
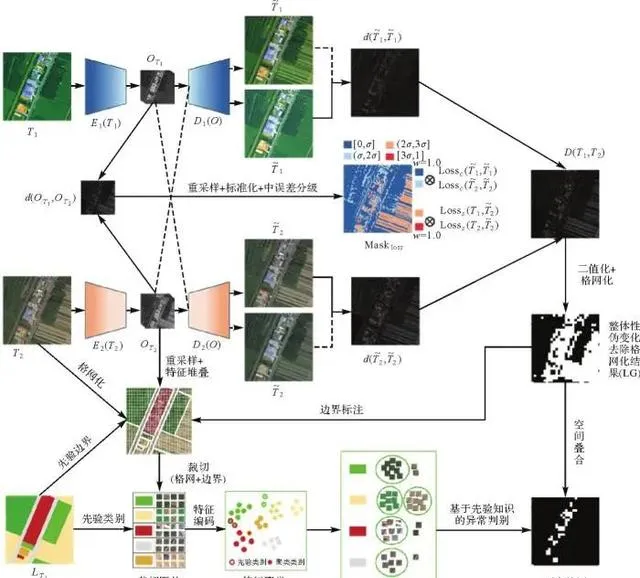
圖4 先驗資訊引導的全域-局部不變檢測方法
Fig.4 Global-local changeless information detection method based on prior knowledge
整體性偽變化去除首先利用編碼器將 T 1 和 T 2 對映至編碼空間 O ,然後再透過解碼器進行分別解碼得到各自回歸後的結果,並利用解碼器將 T 1 和 T 2 進行重構,構建顧及影像局部差異的聯合損失函數,透過重構損失、回歸損失和結構一致性損失的聯合訓練,約束摺積自編碼網絡實作特征對齊、整體性回歸,同時避免局部變化區域的誤生成。訓練完成後計算回歸後影像間的差異,累加得到 T 1 和 T 2 的最終差異圖,並進行二值化和格網化得到整體性偽變化去除結果LG。整體過程的數學表達如下。
前後兩期遙感影像分別為 T 1 和 T 2 ,則兩者間分別回歸的數學表達為
 (1)
(1)
 (2)
(2)
透過摺積自編碼網絡擬合
F
(
T
1
)和
H
(
T
2
),
F
(
T
1
)對應的編碼器
E
1
(
T
1
):
,解碼器
 :
:
 ,
H
(
T
2
)對應的編碼器
E
2
(
T
2
):
,
H
(
T
2
)對應的編碼器
E
2
(
T
2
):
 ,解碼器
,解碼器
 。同時重構
T
1
和
T
2
,
。同時重構
T
1
和
T
2
,
 :
:
 ,
,
 :
:
 。
。
顧及影像局部差異的聯合損失函數包括重構損失Loss R 、回歸損失Loss C 、結構一致性損失Loss S 。損失計算時需根據編碼空間 O 中的影像差異進行條件權重計算。具體如下
 (3)
(3)
 (4)
(4)
 (5)
(5)
 (6)
(6)
 (7)
(7)
 (8)
(8)
 (9)
(9)
 (10)
(10)
式中, T 、 P 分別代表原影像和對映影像; C 、 M 、 N 分別為影像的通道數、行數和列數; m 、 n 代表像素在影像中的行列位置;Loss r 用於計算重構損失;Loss c 用於計算回歸損失;Loss s 用於計算結構一致性損失; wc 和 ws 為不同Maskloss 值處對應的權重,對應{[0, σ ),[ σ ,2 σ ),[2 σ ,3 σ ),3 σ ,1}, wc =[1.0,0.5,0.25,0], ws =[0.25,0.5,1.0,0]; Fim 和 Fjn 是影像在 i 和 j 通道的 m 和 n 位置的值;式(8)、式(9)中 G 為格拉姆矩陣;SSIM為結構相似性指數[58] ; W 為影像塊的個數; w 為影像塊的序號,此處取16×16的影像塊,用於分塊計算SSIM。
兩期影像間差異 Δ 可透過式(11)計算得到
式中, d 為差異性度量函數; I 1 和 I 2 分別代表兩期影像。為簡化計算,這裏選擇對應像素間曼哈頓距離絕對值,多通道向量計算時通道間取均值。特殊地, T 1 和 T 2 之間的差異 D ( T 1 , T 2 )= + 。
局部性偽變化去除首先將 T 2 影像透過預訓練的編碼器 E 2 進行特征提取,得到編碼空間 O 的特征圖 ,旨在捕捉影像的深層次特征,然後將 重采樣至 T 2 影像大小,並進行堆疊,將深層特征與影像表層特征相結合。之後對堆疊後的影像進行格網化,以產生大小一致的圖斑。同時, T 1 影像分類結果 的邊界和類別資訊和整體性偽變化去除格網化結果LG疊加到每個圖斑上,以提供先驗邊界和類別資訊。對於每個裁切的圖斑 C ,對其特征進行編碼,並利用AP(affinity propagation)聚類演算法對這些特征進行聚類分析。將AP聚類結果與先驗類別進行比較,辨識並標記分類不一致的圖斑。同時,標記單個聚類簇過小的圖斑為異常圖斑。根據基於不變區域面積遠大於變化區域面積這一假設條件,將聚類結果與先驗類別一致的和聚類後類別數量很大的圖斑進行刪除,得到局部偽變化去除格網化結果。
2.5 成果輸出與評價
成果輸出與評價步驟主要是為方便作業,可對可能變化區域範圍適當擴大及規則化,並形成不變區域覆蓋掩膜,為後續人工目視解譯提供便利的產品服務。成果評價主要是從使用者角度對不變檢測成果的精度、不變掩膜覆蓋率等進行評價,最後將不變檢測成果輸出並套用於具體實踐。
變化檢測結果的精度評價方法和指標有多種,較為常用的有混淆矩陣[59] 、ROC曲線[60] 、交並比[61] 等。混淆矩陣作為一種精度評價方法廣泛套用於遙感領域資訊提取和分類結果的精度檢驗,總體分類精度、錯分誤差、漏分誤差和Kappa系數等指標均可以透過混淆矩陣來進行計算[15] 。
不變檢測的成果呈現方式與傳統的變化檢測存在差異,其輸出結果采用格網形式呈現。格網大小基於人工目視判定的最小單元設定,從而將影像劃分為一系列相對小的區域。不變格網覆蓋的區域被視為不需要進一步人工變化檢測作業的區域,本文從使用者角度提出壓蓋準度、壓蓋振幅兩個物件級指標作為不變區域檢測成果評價指標。壓蓋準度代表不變格網提取的精度,壓蓋振幅代表不變格網的占比,兩者協同作用,為不變檢測的成果質素提供了客觀而有效的評價方法。
2.5.1 壓蓋準度
壓蓋準度(compression accuracy,CA)是反映不變檢測準確性效果評價的基礎指標,以圖斑物件為單元進行評價。壓蓋準度為不變區域掩膜外的真實變化圖斑個數與所有真實變化圖斑個數之比。計算公式如下
式中,CN為位於不變區域掩膜外的變化圖斑個數;SN為變化圖斑總個數,部份遮蓋按是否滿足最小上圖面積計數,最小上圖面積由變化檢測任務需求決定。
2.5.2 壓蓋振幅
壓蓋振幅(compression range,CR)是反映不變檢測成果對作業效率提升效果評價的基礎指標,壓蓋振幅為不變區域掩膜面積與整體作業區域面積之比。相關計算公式如下
式中,BA為不變區域掩膜面積;DA為整體作業區域面積。
另外,不變檢測成果對作業效率提升效果也可用壓縮率來評價。壓縮率為不變區域掩膜外的可能變化區域面積與整體作業區域面積之比。對於同一地區,在壓蓋準度相同的情況下,壓縮率越低,表明可能變化區域面積越小,檢測結果越精確,對應的變化檢測正確率越高。
3 套用實踐
在上述遙感影像高可信智能地類不變檢測技術框架的指導下,開發了遙感影像高可信智能地類不變檢測系統(ACID),並在全國國土利用變更遙感監測、自然資源督察與執法、耕地非農化監測、全國產業園監測等多項國家重大工程及省區市遙感監測生產中套用。利用2020年度全國國土利用遙感監測生產專案圖斑成果,綜合考慮省級行政單元、地區、地形、氣候、發展狀況等因素,在全國選取500個典型區縣進行了測試,平均壓蓋準度為97.79%,壓蓋振幅為47.84%。經多名生產人員獨立實測,相比於全人工作業,50%壓蓋振幅下變化發現環節耗時減少47.36%。證實了本文技術框架與方法在保證精度的同時,能夠大幅減少人工目視變化發現工作量,顯著提升作業效率,在實際套用中取得良好效果。
3.1 不變檢測樣本庫構建
以空間數據庫為載體,規定針對典型要素提取、地表覆蓋分類的樣本庫格式規範,規定樣本庫構建的遙感影像要求、歷史解譯數據要求、樣本儲存要求等,並記錄樣本基本資訊,影像基本資訊,樣本類別、「偽變化」原因類別、空間關系、各類特征、可信度、地理位置等,形成滿足深度學習需求的不變檢測樣本庫,如 圖5 所示。
圖5
圖5 樣本庫表結構
Fig.5 Structure of sample library tables
基於多個年度的全國國土利用變更調查遙感監測成果,構建了一個包含107 168組樣本的不變檢測樣本庫。每組樣本包括前時相影像、後時相影像、像素級標簽及樣本內容等資訊。樣本的空間範圍為1024 m×1024 m,涉及11個省區市的26個區縣,包括東北、華北、內蒙古草原、黃土高原、西北、四川盆地、江南丘陵、長江中下遊平原、華南、雲貴高原、青藏高原等多樣的地形地貌區域。
樣本庫使用了十余種遙感資料來源,並擁有不同的分辨率,其空間分辨率包括0.5、1、2和5 m。樣本內容基於影像表現特征進行分類,並進一步細分為5大類:①影像不變;②是否存在成像引起的變化;③是否存在陰影、遮擋、數據失真等現象;④是否存在地物狀態變化;⑤是否存在地物類別變化。該樣本庫能夠支持不變檢測任務的訓練、驗證和測試,可為相關研究和套用領域提供有力的數據支持。
3.2 不變檢測技術方法
整體性偽變化去除。基於已構建的包括各類偽變化類別的不變檢測樣本庫,本文設計了專門針對不同偽變化類別的網絡模型,采用基於直推式影像回歸模型的方法,透過建立前後時相影像之間的回歸關系,可以較好地消除整體性偽變化。以河南和陜西各10個區縣進行驗證,隨著壓縮率的變化,壓蓋準度與壓縮率的關系如 圖6 所示。由 圖6 可知,前10%的格網包含約80%的變化;前30%的格網包含約95%的變化;前50%的格網包含約97%的變化。
圖6
圖6 壓蓋準度與壓縮率的關系
Fig.6 Relationship between compression accuracy and compression range
為進一步驗證演算法的適用性,基於2020年度全國國土變更調查遙感監測專案中新增建/構築物提取成果,綜合考慮省級行政單元、地區、地形、氣候、發展狀況等因素,在全國選取500個典型區縣進行了測試。各省區市結果如 圖7 所示,平均壓蓋準度為97.79%,壓蓋振幅為47.84%。試驗結果表明,該技術能夠在保證極高的壓蓋準度的前提下,有效地消除遙感影像變化檢測中的整體性偽變化,且具有廣泛的適用性。
圖7
圖7 全國整體性偽變化去除測試結果
Fig.7 National holistic pseudo-change removal test results
局部性偽變化去除。在整體性偽變化去除結果的基礎上,利用全國不同地區的15個區縣的數據進行了局部性偽變化去除演算法測試,在未利用樣本庫數據進行訓練的情況下,平均壓蓋準度為91.90%,平均壓蓋振幅為86.81%,具體結果如 表2 所示。試驗結果表明,該技術能夠在無外部樣本庫監督的情況下,透過自動提取已有參考數據中的資訊,突破訓練數據帶來的適用性限制,有效消除遙感影像變化檢測中的局部性偽變化,極大提升壓蓋振幅。
表2 15個區縣局部性偽變化去除演算法結果
Tab.2 Results of the local pseudo-change removal algorithm for 15 districts and counties
| 行政區名稱 | 真實變化圖斑個數 | 不變區域掩膜外的變化圖斑個數 | 壓蓋準度/(%) | 壓蓋振幅/(%) |
|---|---|---|---|---|
| 北京市門頭溝區 | 65 | 61 | 93.85 | 93.54 |
| 河北省石家莊市深澤縣 | 65 | 61 | 93.85 | 85.41 |
| 山西省臨汾市侯馬市 | 33 | 31 | 93.94 | 73.82 |
| 內蒙古錫林郭勒盟正鑲白旗 | 98 | 93 | 94.90 | 97.75 |
| 吉林省白山市渾江區 | 85 | 72 | 84.71 | 94.55 |
| 江蘇省揚州市高郵市 | 185 | 165 | 89.19 | 93.44 |
| 浙江省杭州市桐廬縣 | 153 | 141 | 92.16 | 92.31 |
| 浙江省寧波市象山縣 | 268 | 223 | 83.21 | 89.25 |
| 安徽省合肥市蜀山區 | 260 | 238 | 91.54 | 77.60 |
| 安徽省六安市金安區 | 266 | 235 | 88.35 | 93.53 |
| 福建省泉州市泉港區 | 50 | 48 | 96.00 | 70.59 |
| 河南省新鄉市獲嘉縣 | 76 | 72 | 94.74 | 83.91 |
| 湖南省長沙市雨花區 | 78 | 75 | 96.15 | 88.90 |
| 湖南省株洲市天元區 | 69 | 69 | 100.00 | 80.24 |
| 湖南省湘西土家族苗族自治州花垣縣 | 107 | 92 | 85.98 | 87.34 |
| 平均 |
|
|
91.90 | 86.81 |
新視窗開啟| 下載CSV
3.3 成果輸出與套用
采用格網化的形式,將作業區進行劃分,並根據壓蓋準度和壓蓋振幅等評價指標,對不變檢測的成果進行了全面分析。 圖8 直觀地呈現了不變區域和可能存在變化區域,其中不變區域為不變檢測生成的格網化掩膜,該區域無須人工進行目視解譯,未被覆蓋的區域則需要人工辨識和提取變化區域。利用不變檢測技術,在壓蓋振幅50%的水平下,壓蓋準度超過97%,不變掩膜成果能夠滿足生產精度要求,經21名生產人員的測評,相比於全人工作業,變化發現環節耗時減少47.36%,極大地提高了人工生產作業效率,為實用場景下自動化演算法服務於變化檢測提供了可行方案。同時,隨著技術發展,預計未來在保證生產精度的前提下,不變掩膜的壓蓋振幅將不斷增加,從而進一步提高生產作業的效率。
圖8
圖8 不變掩膜格網化結果範例
Fig.8 Example of changeless mask gridding results
4 總結與展望
本文透過分析現有變化檢測演算法在實際套用中存在的不足,逆向思考,提出不變檢測的技術框架。基於辨析和揭示地表覆蓋類別「變」與「不變」的本質特征,確立不變檢測的概念,確定不變檢測流程,提出不變區域檢測成果的評價指標。此外,本文提出了不變檢測樣本庫構建、不變檢測技術方法、成果輸出與評價的方法和實作思路。透過不變檢測思想,將變化資訊提取從變化檢測一步走分解為「不變區域自動檢測+可能變化區域人工解譯」兩步走,從而在保證精度的同時大幅減少人工目視判讀工作量,顯著提升提取效率,為智能化技術服務於自然資源地表覆蓋要素更新提供思路。
在未來的研究中,不變檢測還有望在以下幾個方面展現出更強的生命力:①樣本庫的發展。不變檢測技術的發展離不開樣本的支撐,未來將建立更加完善的不變檢測樣本庫。②不變檢測模型的發展。直推式影像回歸模型目前還處於探索階段,知識與影像分類方法的結合也正在發展,未來將不斷突破。③不變檢測套用前景。隨著遙感、人工智能、大數據等學科的發展和套用領域的拓展,不變檢測技術將廣泛套用於各類自然資源監測場景,同時朝著智能化、自動化方向發展。
初審:張 琳
復審:宋啟凡
終審:金 君
資訊











