帶翼無人駕駛飛行器(UAV)因其出色的單位品質續航能力,特別適用於遠距離任務,如送貨、測繪和搜尋救援。然而,與有翼飛行動物相比,它們在復雜結構上的著陸或棲息能力受限,難以執行檢查、操作、監控或電池充電等任務。
這一局限性推動了控制和機械系統的發展以實作棲息功能。
帶翼無人機的棲息問題通常 透過復雜的控制策略或精巧的附加裝置來解決 。受鳥類棲息行為的啟發,研究主要集中於俯仰機動和失速後控制,以降低著陸速度,並實作如垂直墻壁棲息或電纜懸掛等棲息方式。 然而,這些機動需要高精度的傳感系統嵌入控制演算法,且可能面臨潛在的危險飛行條件。
為避免復雜的俯仰機動,已提出采用機械系統作為替代方案。盡管多旋翼飛行器在棲息機械系統方面有豐富的套用,但有翼無人機的可用選擇相對較少。
▍提出「上翹機頭」,實作穩定棲息
前不久, 來自瑞士洛桑聯邦理工學院智慧系統實驗室、生物機器人實驗室以及美國紐約州立大學石溪分校Soft Flyers小組 的研究人員,受動物和蝙蝠肢體在抓握和棲息樹木方面的適應力啟發,精心設計了一種兩用機翼,這種機翼不僅在空中滑翔時表現出色,還 可使有翼機器人能夠依靠被動機翼變形,在樹木、建築腳手架、電塔、路燈、電線桿等多種型別的垂直桿上實作緊急降落。

壁虎著陸時頭朝下撞向樹幹,隨後全身旋轉,以後肢和尾巴觸地停止。 受壁虎著陸策略啟發,研究人員提出了一種新方法,並巧妙地將「上翹機頭」設計融入無人機PercHug中。 當無人機與桿子發生碰撞時,這一設計使其能夠從水平飛行狀態被動地重新定向至垂直姿態,從而避免了在接近失速攻角時需要執行復雜的俯仰動作。
隨後,無人機可模仿某些飛行動物的行為模式, 利用可折疊、預裝的分段機翼(在撞擊時透過閂鎖系統釋放)纏繞在垂直桿上進行棲息。 其獨特的上翹機頭設計確保了機器人在與桿子正面碰撞後,能夠平穩地從水平飛行狀態重新調整為垂直飛行狀態,進而用翅膀緊緊抱住桿子,實作穩定的棲息。

相較於部份蝙蝠和鳥類物種所采用的形態適應力以及翅膀、腳和尾巴的使用策略,本解決方案 避免了引入增加重量和復雜性的專用棲息腳結構 。相反,它巧妙地選擇了利用現有無人機元素的雙重用途策略,其中就包括使用前肢(即翅膀)緊緊抱住桿子,並保持重心靠近桿子,以 最小化後仰效應,確保了棲息的穩定性。
那麽,這款機器人的設計具體是如何實作的呢?接下來,和機器人大講堂一起來深入了解吧!
▍200毫秒內完成著陸?PercHug的工作原理與機器人設計
PercHug無人機能夠在極短的時間內(約200毫秒)完成著陸過程。它透過以特定的速度和迎角飛向電線桿,首先利用機頭進行初步撞擊。撞擊產生的能量使無人機開始俯仰旋轉並釋放預載入的機翼。隨後,無人機機身或尾部進行二次撞擊,停止旋轉,機翼緊貼電線桿,從而將無人機固定到位。
PercHug無人機采用發泡聚丙烯(EPP)柔性輕質泡沫、3D打印的堅韌聚乳酸(PLA)和纖維增強碳棒三種核心材料制成。其機身、上翹的機頭、機翼和機尾的外殼均透過熱絲泡沫切割工具精確制作,並在最後階段進行精細組裝。其設計實作了飛行和墜落棲息的雙重功能,無需專用的棲息爪或腳等額外的硬體。

無人機的上翹機頭設計,使其能夠被動地從水平飛行調整到棲息所需的垂直配置。機頭尖端的沖擊力會產生繞重心的力矩,從而產生旋轉。除了機頭形狀外,研究團隊還研究了使用柔性扁平碳棒結合機頭延伸來調整效能。
同時,飛行器配備可折疊機翼,有三個鉸接段。一個段連線到機身,其他兩個段可以向腹側彎曲以纏繞在桿子上。扭轉彈簧放置在段之間的介面處並在飛行過程中預載入。受到撞擊時,彈簧會松開,使段折疊並壓在桿子上。機翼最外側部份可配備9個可拆卸掛鉤,以幫助與粗糙表面接合。張緊線則使機翼在飛行過程中保持張開和筆直。
此外,無人機還配備了釘選機構,該機構在飛行過程中使電線保持張緊狀態,並在受到撞擊時被動釋放。研究人員可以透過調整壁高來調整釋放時間,以實作初次撞擊或二次撞擊時機翼的釋放。這是透過備用雙穩態觸發器實作的,其操作方式類似於已知的機制。機身底部的二次撞擊會被動觸發釋放機翼。
▍分離重新定向與抱桿問題,分析機頭選擇與機翼設計影響
為了深入研究,研究團隊將重新定向和抱桿問題分離,獨立探討了機頭選擇和機翼設計的影響。 研究聚焦上翹機頭(涵蓋帶與不帶彈性機頭延伸的兩種型別)在撞擊瞬間重新定向機器人的效能展現。采用柔性機頭的核心理念在於探索其能否透過延長相對於重心的撞擊力矩臂、緩解機身承受的最大撞擊力,並更有效地重新定向力向量,從而實作向上滑動並穩固附著於表面,進而強化重新定向的能力。
對於成功與失敗的標準,研究團隊進行了明確:若無人機能達到垂直狀態並與墻壁實作二次接觸,則判定為重新定位成功;反之,若無人機在初次撞擊後從表面反彈且未發生二次撞擊,則視為失敗。
成功重新定位的案例跟蹤數據如下圖b所示,其中初次撞擊階段(紅色突出顯示)標誌著重新定位的開始,伴隨著平移速度的急劇降低和俯仰率的顯著上升。重新定位機動的終結則對應於最大俯仰角的點(藍線標記)。撞擊速度Vi和相對撞擊角β均是從初次撞擊的瞬間進行估算的。值得註意的是,在假設中,墻壁是垂直的,因此β角代表了機器人撞擊時的俯仰角度。
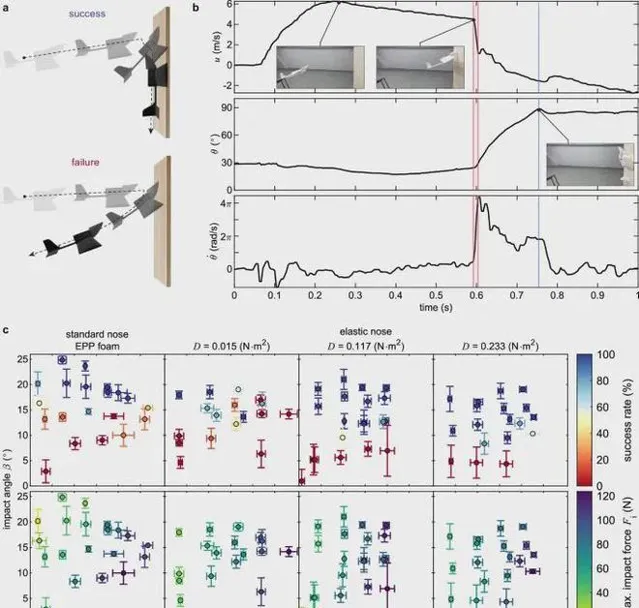
研究發現,重新定位成功主要取決於撞擊角度而非速度 。上圖C清晰顯示,任何鼻尖型別,若撞擊角度低於閾值則失敗。標準上翹鼻尖在3至9公尺每秒速度下,15°以上角度能成功重新定位,匹配同尺寸飛行器巡航速度。增強彈性鼻尖的抗彎剛度D,可在更低角度成功定位,最剛鼻尖最低達8°。在測試鼻尖中,0.2333N·m²抗彎剛度彈性鼻尖表現最優。不同條件下成功率有差異,但重新定位時間對各速度、角度、機頭型別一致,平均196±59毫秒。
與成功率不同,主要沖擊力Fi與沖擊速度Vi之間呈線性比例關系 。在3至9公尺每秒的速度範圍內,沖擊力峰值介於15至120N之間。 預計重量和沖擊力之間也存在線性相依性 。對於標準上翹機頭,主要沖擊力隨沖擊角度減小而略有增加。然而,對於其他機頭型別,這種相關性不明顯,可能受機頭柔韌性影響。盡管與標準上翹機頭相比,抗彎剛度為0.233N·m²的彈性機頭在較低沖擊角度下的成功率提高,但 在測試速度範圍內,其受到的主要沖擊力相似。這種改進可歸因於撞擊點與重心之間拉長的力臂。
根據簡化的重新定向動力學模型,俯仰加速度受剛性鼻尖偏移參數影響,在剛度最大的彈性鼻尖延伸部份尤為顯著。此外,在較低俯仰角下,垂直鼻尖偏移對俯仰力矩的貢獻更大。因此, 增加垂直鼻尖偏移可提高較低撞擊角度下的成功率 。提供的數據將有助於估計類似尺寸機器人在不同重量下的沖擊力,為機身機械設計和結構分析提供參考。
▍開發機翼包裹模型,探究折疊翼尺寸和分段具體影響
折疊翼的尺寸和分段對機器人可棲息的桿直徑範圍具有決定性影響。 為探究最合適的尺寸,研究團隊開發了一個機翼包裹模型,並透過桿抱實驗對預測的機翼設計進行了驗證。 該模型適用於無鉤機翼靜態棲息的情況。
與利用幹濕粘附或爪子抓住樹面的昆蟲不同,大型動物透過互鎖方法用前肢環繞樹幹。類似地, 研究團隊假設無人機可棲息的最大桿直徑對應於180°的機翼包裹角,最小桿直徑則對應於防止兩個翼尖重疊的尺寸。 機翼包裹角由折疊機翼覆蓋的桿部份定義,其最大值取決於翼展、節的數量和長度。為了保持機翼的包裹狀態,最外層段的法向和切向反作用力必須足夠大,以抵消機身和其他段上的力。
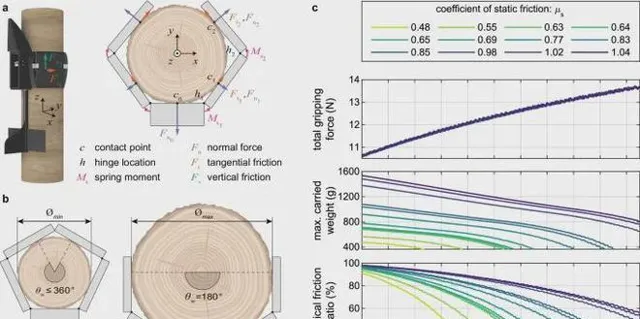
該模型考慮了機身和機翼的多種特性,包括翼展、機身寬度、折疊翼段的數量和尺寸、扭轉彈簧的剛度,以及EPP和桿材料之間的靜摩擦系數。 這些因素有助於估計無人機可停泊的直徑範圍和最大靜態有效載荷。適合停泊的桿直徑範圍主要與翼展成比例,跨度約為翼展的28%到50%。與模型預測一致。
此外, 該模型還用於研究抓握力和最大靜態有效載荷隨桿直徑和靜摩擦系數的變化。 分析顯示,凈抓握力與桿直徑呈正相關,但隨著直徑的增加,無人機在滑下桿子之前可以支撐的最大重量會減小。靜摩擦系數的增加則會導致整體靜態棲息效能的改善。
研究團隊透過實驗驗證了所選的機翼設計,結果表明測量值與模型預測值之間存在很強的一致性。實驗還表明, 假設表面材料保持不變,最大有效載荷會隨著直徑的減小而增加,突顯了增加摩擦系數對有效載荷能力的積極影響。
▍兩種配置進行詳盡測試,全面評估PercHug重新定位與棲息效能
為了全面評估機器人的重新定位和棲息效能,研究團隊從撞擊速度、角度、桿子材質和尺寸等多個方面對PercHug進行了實驗測試。

在實驗中, 研究人員精心挑選了靜態棲息實驗中曾使用的六棵樹木,對兩種配置的PercHug進行了詳盡測試: 一種裝備了D=0.233 N·m²的延伸彈性鼻子,該配置以其卓越的重新定向效能著稱;另一種則未裝備此延伸彈性鼻子。所有動態棲息實驗均遵循嚴格的操作流程,即透過手動方式將機器人推向樹木。只有當棲息試驗完整經歷了滑翔、撞擊時的精準重新定位、翅膀的有效卷起以及最終穩固停留在樹上這四個關鍵階段,方被視為一次成功的試驗。
實驗結果顯示,勾點在顯著提升棲息成功率方面扮演了核心角色,尤其 在防止機器人在卷翼過程中滑落的問題上,勾點成功地提高了超過三分之一的試驗成功率, 透過隨機與表面接觸實作快速制軔。
研究團隊深入探索了 機翼釋放的最佳時機,發現相較於二次撞擊釋放策略,一次撞擊即時釋放能更有效地確保機器人穩定棲息 ,後者常因延遲釋放導致機器人從樹幹脫落。實驗數據進一步證實了這一結論:成功棲息的案例中,釋放機制在撞擊發生後僅約25毫秒內迅速啟用,緊接著纏繞動作幾乎與重定位同時完成,整個棲息過程極為迅速,凸顯了同步解鎖與釋放策略的重要性。
值得註意的是,著陸的精準度對於成功棲息至關重要 。機頭在撞擊目標時若偏離中心線或存在角度誤差,均可能導致棲息失敗,特別是在低撞擊角度下,重定位不足會使機器人反彈。然而,PercHug的尾部設計在垂直定位時猶如「定海神針」,其表現與壁虎尾巴功能的研究結果不謀而合,展現了長尾設計在提升機器人緊急著陸穩定性方面的顯著優勢。
PercHug在不同速度及撞擊角度條件下均展現出了卓越的動態棲息能力,實驗數據的高度一致性令人印象深刻。特別地, 標準上翹鼻配置以高達73%的成功率顯著優於彈性鼻配置(42%),盡管後者在促進重定位方面有所助益,卻犧牲了纏繞效能。 此外,實驗還發現較寬的樹木會降低棲息成功率,這一發現與先前的模型預測及靜態實驗結果相吻合,再次強調了樹木直徑對動態棲息成功的決定性作用。
這一創新成果不僅為空中機器人技術帶來了重大突破,更為其在檢查、維護和生物多樣性保護等領域的套用開辟了廣闊前景。
參考文章
https://www.nature.com/articles/s44172-024-00241-0#Abs1











