編碼器是編碼旋轉角度、線性位移及速度等運動參數的傳感器,可將機械運動轉換為電訊號輸出,具有高精度、高分辨率、快速響應等特點,適用於工業自動化、汽車制造、機器人技術、醫療裝置、航空航天、機床等眾多需要精確位置測量的套用場景。
編碼器的數據反饋對於實作人形機器人運動的精密控制和定位至關重要,主要用於監測和控制機器人關節的運動位置,確保精確的運動控制和定位。旋轉關節通常需要兩個編碼器以確保準確度和穩定性,線性關節和靈巧手則需要一個編碼器。
一、編碼器:伺服系統關鍵器件
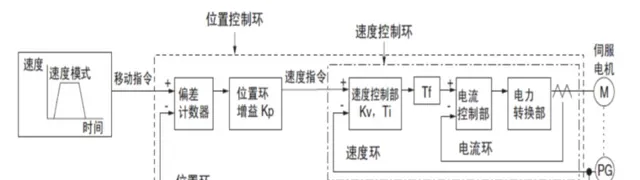
編碼器通常與電機相連,檢測其狀態,並把訊號反饋回驅動器,驅動器對反饋訊號進行匯總、分析、修正,從而精確控制執行機構的位置、速度、轉矩等輸出變量,實作閉環。
伺服系統的基本組成部份包括上位機、電機、編碼器、驅動器、控制器等。從成本構成上看,驅動器成本占整個伺服系統成本的42%,電機的成本占比約35%,編碼器成本占比約為11%。
伺服驅動器接受上位機發送的訊號,然後轉換為功率訊號,即能夠控制電機的電流,驅動電機工作,編碼器作為核心傳感器把電機旋轉的角度和速度即時反饋給驅動器,驅動器依照反饋訊號保證電機穩定和良好地輸出效能,形成閉環控制,確保電機位置、轉向、轉速滿足預定要求。
二、編碼器分類
整體看,以測量型別做區分,編碼器可以分成直線/線性編碼器、旋轉編碼器;以輸出訊號來區分,編碼器可以分為增量式編碼器、絕對式編碼器;從技術原理角度出發,編碼器可以分為磁編碼器、光編碼器、電感編碼器。
1、測量型別:直線/線性編碼器、旋轉編碼器
直線/線性編碼器測量物體的直線位移,旋轉編碼器測量物體的旋轉角度。

直線/線性編碼器是一種用於測量物體直線運動的裝置,可以將物體的線性移動轉換為電訊號輸出。通常由傳感器和標尺組成,標尺被固定在物體上,傳感器則測量標尺上的位置資訊,主要用於機械加工、數控機床、3D 打印、半導體制造等領域。直線編碼器的代表是光柵尺。
旋轉編碼器是一種用於測量旋轉軸角度、速度和位置的傳感器,可以直接安裝在物體上,以測量物體的旋轉運動。它們廣泛套用於自動化控制系統、機器人、航空航天、汽車、醫療裝置等領域。
2、輸出訊號:絕對式編碼器和增量式編碼器
絕對式編碼器是一種位置傳感器,它能夠提供裝置在絕對座標系中的位置資訊。絕對式編碼器的工作原理通常涉及一個碼盤(或稱為光柵盤),它上面有一系列的編碼線或槽。這些編碼線以特定的模式排列,每個位置的編碼線組合是唯一的。碼盤與編碼器的讀頭相對應,讀頭包含光電傳感器或其他型別的傳感器,用於檢測碼盤上的編碼資訊。
與增量式編碼器不同,絕對式編碼器不需要依賴於一個參考點或復位訊號來確定位置,因為它在每個位置都有唯一的編碼與之對應。

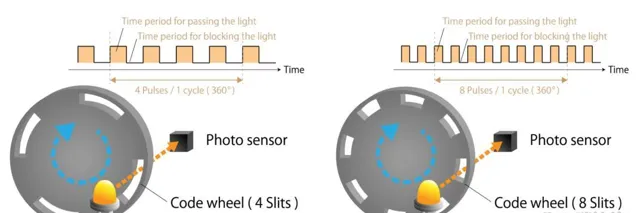
增量式編碼器是一種位置和速度傳感器,它提供相對於某個初始位置或上一個測量點的位置變化資訊。增量式編碼器不儲存絕對位置資訊,而是透過計數脈沖來跟蹤位置的變化。增量式編碼器內部通常包含一個碼盤,它與編碼器的讀頭相對應。讀頭包含光電傳感器或其他型別的傳感器,用於檢測碼盤上的光柵線。當碼盤旋轉或移動時,傳感器會檢測到光柵線產生的脈沖訊號。
總結來說,增量式編碼器適合於成本敏感且對絕對位置精度要求不高的套用,而絕對式編碼器則適用於需要高精度、高可靠性和簡便性的套用場景。選擇哪種編碼器取決於具體的套用需求、預算和系統設計考慮。
2、技術原理:磁編碼器、光編碼器以及電感編碼器
磁編碼器,利用電磁感應原理,將物理訊號轉換為數位訊號,以實作位置和角度的測量。磁編碼器由磁性傳感器、磁環和訊號處理器組成。與傳統的光電編碼器不同,磁編碼器不依賴於光學原理,而是透過感應磁場的變化來確定位置資訊。磁編碼器的工作原理基於磁感應元件對磁場變化的響應。當碼盤旋轉或移動時,磁場的分布也隨之改變。磁敏傳感器檢測到這些變化,並將其轉換為電訊號。透過分析這些訊號的序列和時間,可以確定碼盤的位置和移動速度。
光感編碼器,通常稱為光電編碼器,是一種利用光學原理來測量位置和速度的傳感器。光編碼器由發光元件、光敏元件及碼盤(即一個刻有規則的透光和不透光線條的圓盤)組成。它們將機械位置轉換為電訊號,通常用於精確的位置反饋和速度控制。當光柵盤旋轉或移動時,光柵圖案會周期性地阻斷和允許光源發出的光到達光電傳感器。這些變化被傳感器檢測到,並轉換為電脈沖訊號。透過計算單位時間內產生的脈沖數量,可以確定位置變化和速度。
電感式編碼器,透過檢測磁場的變化來確定物體的位置和移動速度,是一種利用電感原理來測量位置和速度的傳感器。電感式編碼器的工作原理基於法拉第電磁感應定律,即當磁場中的導體發生相對移動時,會在導體中產生電動勢。在電感式編碼器中,碼盤上的磁性材料與感應頭中的線圈交互作用,產生變化的磁場。當碼盤旋轉或移動時,磁場的變化會線上圈中產生感應電流,這個電流隨著碼盤的位置變化而變化。電子電路檢測這些電流變化,並將其轉換為脈沖訊號或模擬訊號,從而提供位置和速度資訊。脈沖訊號的頻率與碼盤的旋轉速度成正比,而脈沖的數量則與旋轉的總角度有關。

系統看,光學編碼器的優勢為分辨率、準確度較高,但是碼盤在灰塵、油汙環境中易受汙,影響可靠性和精度;磁編碼器在精度和分辨率遜色於光學編碼器,其優勢在於感應原理為未接觸式(透過測量磁場的變化感應),不易受到惡劣環境的影響,更耐用、抗振和抗沖擊;電感式編碼器精度、分辨率均較高,且耐受灰塵、油汙,但其對磁鐵的距離和方向非常敏感,稍有偏離則容易造成測量誤差。
三、編碼器兩類使用場景
焉知科技目前重點關註智慧電動汽車、人形機器人,因此本章節以這2個使用場景為主。
1、人形機器人:
特斯拉 BOT 運動控制模組主要分為直線執行模組、旋轉執行模組和靈巧手,編碼器用於測量關節角度和位置,確保 BOT 的運動精度和穩定性。
旋轉執行模組有14個,每組包括無框力矩電機、諧波減速器、雙編碼器、力矩傳感器以及軸承,賦予 BOT 精準的旋轉控制能力。直線執行模組有14個,每組包括無框力矩電機、行星滾柱絲杠、編碼器、力傳感器以及軸承,這些零部件相互協作,使 BOT 能夠實作精準的運動。靈巧手使用的空心杯電機模組則由空心杯電機、減速器和編碼器構成,從而使得 BOT 手部能夠實作高度敏感和靈活的運動,為實作復雜的抓取和操作任務提供了堅實的基礎。
磁式編碼器因其體積小、重量輕、工作溫度範圍寬、抗沖擊、抗震、穩定性強等優點,在人形機器人領域得到廣泛套用。

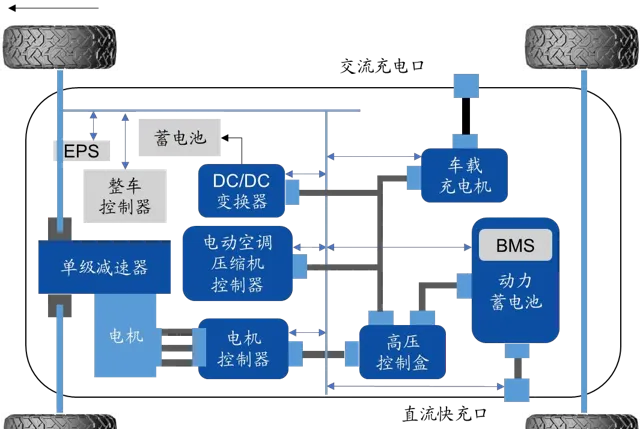
2、汽車:
磁編碼器在汽車中的套用非常廣泛,它們利用磁場變化來精確測量角度和位置,對於提高汽車的效能和安全性起著重要作用。不管油車還是電車,都在使用精度高、可靠性和耐用性強的磁編碼器,據 Yole 對於整體磁傳感器下遊行業的統計和預測,汽車套用的占比已經超過了整體市場的 50%。隨著汽車向電動化、智慧化發展,磁編碼器的套用範圍預計將進一步擴大。
以下是一些磁編碼器在汽車中的具體套用:
傳動系統控制:監測傳動軸的轉速和位置,實作平穩的換擋操作和提供所需的動力輸出。
發動機管理系統:測量發動機曲軸或凸輪軸的位置和速度,用於燃油噴射、點火定時和可變氣門正時系統。
防抱死制軔系統(ABS):監測車輪的轉速變化,幫助實作ABS和電子穩定控制(ESC)等關鍵功能。
轉向系統:測量方向盤的轉角,用於電動助力轉向系統(EPS)和車道保持輔助系統。
懸掛系統:控制懸掛系統的調整,提供適應力或主動懸掛控制。
電池管理系統(BMS):在新能源汽車中,磁編碼器可以用於監測電池系統的充電狀態和健康狀態。
車載充電系統(OBC):監測充電過程中的電流和電壓變化,確保充電安全和效率。
直流變換系統(DCDC):監測和控制電壓轉換過程,為汽車電子裝置提供穩定的電源。
啟動發電機系統:監測啟動發電機的工作狀態,提高啟動效能和發電機效率。
油門控制系統:測量油門踏板的位置,用於電子油門控制系統,提高油門響應速度和燃油效率。
車輛儀表和駕駛資訊反饋:測量車速和其他關鍵參數,為駕駛員提供準確的車輛狀態資訊。
新能源汽車電機控制:在電動汽車和混合動力汽車中,磁編碼器用於電機控制系統,提高電機效率和整車效能。
安全監測:用於監測車輛的安全相關部件,如安全帶張緊器和氣囊部署系統。