即使是在地球上有著數以億計的想象,也無法預見到全球第五個成功實作月球軟著陸的國家所采用的非常規方式。盡管條件艱苦,該著陸器不僅成功著陸,還部署了兩個小型機器人,它們開始按計劃進行任務,並意外地記錄了著陸器自己的一個尷尬狀況。

2024年1月20日深夜,被稱為「月球狙擊手」的日本小型探測器在歷經四個半月的漫長旅程後,終於在月球表面著陸,繼蘇聯、美國、中國和印度之後,成為第五個實作這一壯舉的國家。但科學家們很快註意到一個問題:電池電量為何急劇下降?這表明電池並未充電。
幸運的是,兩個機器人已經成功從著陸器中部署出來。科學家們在緊張地尋找電池充電問題的原因的同時,也指揮這兩個機器人執行任務,希望它們能揭示著陸器的異常情況。
根據從月球傳回的遙測數據,科學家們得知著陸器的太陽能電池板被錯誤地朝向了西方,這導致它無法吸收陽光。盡管如此,隨著月球上空太陽的移動,科學家們仍抱有希望太陽光最終能照射到電池板上。但由於月球白天的長達地球上的14天,太陽光需要很長時間才能從西邊照射到電池板。在著陸器的電量降至12%時,科學家們不得不將其關閉,期望它後續能夠重新充電。
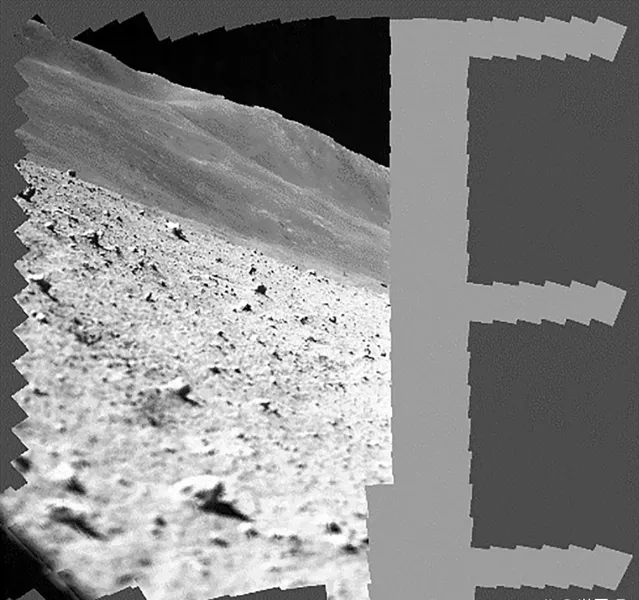
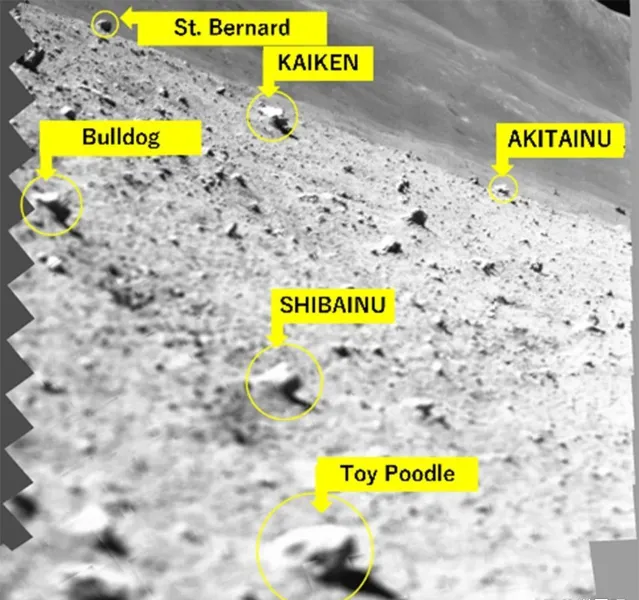
幸運的是,LEV-1漫遊車裝備了通訊系統,可以直接與地球聯系。它能在月球表面跳躍移動,並拍攝低分辨率的照片。LEV-1在數天內成功拍攝了257張照片並行送回地球。科學家們將這些照片拼接起來後,驚訝地發現著陸器竟然是頭朝下,四腳朝天地著陸的,這就是太陽能板無法接收陽光的原因。
這種著陸方式可能是太空探索歷史上最奇特的。數據檢查顯示,著陸器在距離月面還有50米的地方,由於一個推進器噴嘴突然停機,導致其失去控制,最終頭朝下墜落月面。
盡管如此,月球狙擊手在幾個方面創造了紀錄。它不僅是本世紀繼中國和印度之後第三個著陸月球的國家,而且還實作了非常精確的著陸,著陸位置僅偏離預定點55米,顯示出此次開發的精確著陸技術的成功。由於月球沒有GPS,以前的著陸器都是在月面的大致區域著陸,誤差可能達到幾公裏。

月球狙擊手則采用了月面辨識技術,透過下降過程中持續拍攝照片以及與此前由月球軌域器獲取的數據比對來調整著陸方向,以期在100米範圍內實作高精度著陸,顯然這一主要目標已經成功實作,盡管主推進器失效了。

LEV-1和LEV-2不僅成為日本首個月球漫遊機器人,LEV-1采用跳躍方式行進,LEV-2則以變形方式前進,展現出極大的創新。LEV-1的直接與地球的通訊功能也使它成為有史以來最小、最輕且通訊距離最遠的例子。
這些小型機器人的未來命運如何呢?LEV-1的電量已經耗盡,目前處於待機模式,科學家們仍在監控其訊號,等待太陽能夠為它充電。LEV-2的狀況目前還不清楚。而對於著陸器,科學家們依然未放棄希望,期望它能夠挺過寒冷的月夜,在太陽升起時重新獲得充電。











