在电影【机器人之梦】的开头,主角被电视广告上的「ARE YOU ALONE?」打动,购入了一款陪伴自己的人形机器人,他们一起玩游戏、听音乐、逛街吃饭,甚至擦出爱的火花……你是否想象过【机器人之梦】中与机器人相爱的场景发生在现实世界?

电影【机器人之梦】截图 图片来源:网络
2024年的人形机器人热,让人类的想象力又往现实靠近了一步。面对精彩纷呈的产品,不少人惊呼,2024年是人形机器人产业爆发的「元年」。
资本市场的反应也印证了这一点: 在投资人纷纷清仓英伟达的同时,人形机器人的融资却如火如荼。 据CIC灼识咨询的不完全统计,2024年以来,国内的人形机器人企业星动纪元、宇树科技、智源机器人、月泉仿生、加速进化、星尘智能、逐际动力等都获得融资,美国的人形机器人企业Figure AI、Physical Intelligence、Skild AI、The Bot Company、NEO等也纷纷受到投资人的青睐。CIC灼识咨询尝试梳理人形机器人的前世今生,与市场共同走近这一热门产业。
人形机器人不是今天才有,为何近两年热潮再起?这要从与之相关的人工智能大模型技术进步讲起。大模型技术的泛化性,使得产业界看到了人形机器人走向具身智能的希望。此前专用领域的机器人,如工业、扫地、除草等等领域的机器人已有所发展,但都不具备通用能力。由于现实世界的大多数设施按照人类的习惯来构建,人形的机器人最容易模仿人类形成多场景下的通用能力。 大模型的技术突破,为人形机器人的商业化和规模化应用打开了新的大门。
半个多世纪以来,人形机器人的发展从未间断,回顾世界范围内不同时期的代表性产品,有助于我们理解人形机器人的演进方向。技术路线上「通用-专用」,驱动系统上「液压-电气」,基本勾勒出了半个世纪以来人形机器人的发展路线。
第一波对人形机器人的关注,肇始于1972年早稻田大学研发的WABOT-1。早稻田大学官网信息显示,WABOT-1是世界上第一个全尺寸的人形机器人,由肢体控制系统、视觉系统和对话系统组成,能够使用日语与人交流,通过外部感受器、人工耳朵和眼睛以及人工嘴巴来测量物体的距离和方向,使用触觉传感器的手来抓取和搬运物体。WABOT-1设计的初衷是建立一个通用性的多功能机器人,囿于当时各方面的技术条件,在80年代迭代到WABOT-2时,早稻田大学的研究转向了对人形机器人专门功能的研究,技术路线从「通用」转向了「专用」。
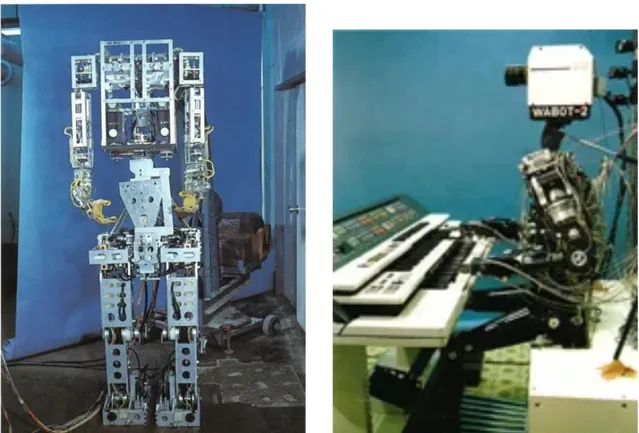
WABOT-1(左)设计的初衷是为了达到通用性
WABOT-2(右)则被期待成为音乐方面的「专家」
图片来源:早稻田大学官网
在WABOT-2推出的同一时期,本田公司开始了对机器人双足行走的研究,几番迭代后,于2000年推出了明星人形机器人ASIMO。在技术不断完善的过程中,ASIMO机器人持续解锁跑步、踢球、搬运物体、上下楼梯等功能。但在2018年,本田终止了对ASIMO的继续研究。外界分析称,随着时间推移,对于人形机器人的研究成本越来越高,本田一直未找到ASIMO与公司主营业务的契合点。商业化前景不明朗的前提下,ASIMO更多地被视为技术展示而非实际应用的产品。
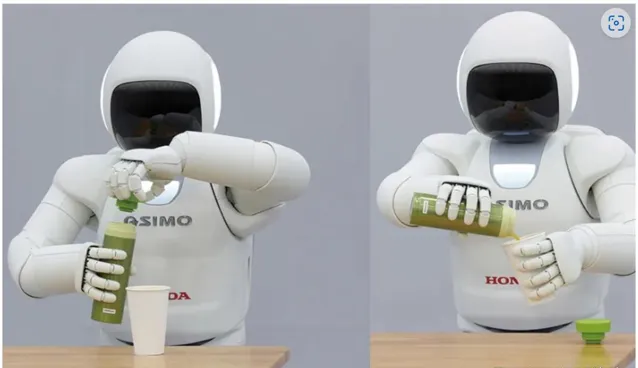
ASIMO正在端茶倒水 图片来源:本田官网
但是,ASIMO为本田后续的研发提供了大量技术积累。据官网信息,2021年9月,长期从事ASIMO等通用型人形机器人研究的本田,转向研究分身机器人(Avatar Robot),注重「脚的技术」、「手的技术」等单项功能的研究,希望首先通过它的某一项能力,尽快为社会提供价值。这一转变再次印证了人形机器人领域「通用-专用」的技术路线。
大洋彼岸的波士顿动力公司,于2013年推出了人形机器人领域的代表性产品Atlas,这款人形机器人具备比如奔跑、跳跃、后空翻和搬运等各种功能,其对各种环境的适应性和平衡性一直是同类机器人中的翘楚。然而,随着技术的不断进步和更新换代的需求,Atlas在2024年宣布停止开发。波士顿动力为Atlas发布的告别视频中,展示了其在遭受撞击时液压系统漏油的画面,这也似乎预示着Atlas被淘汰的真正原因。

Atlas遭遇碰撞时漏油的画面
图片来源:Farewell to HD Atlas视频截图
在液压系统版Atlas退役的第二天,粉丝们还沉浸在伤感中时,它又「复活」了,这一次的Atlas搭载着全新电动系统。
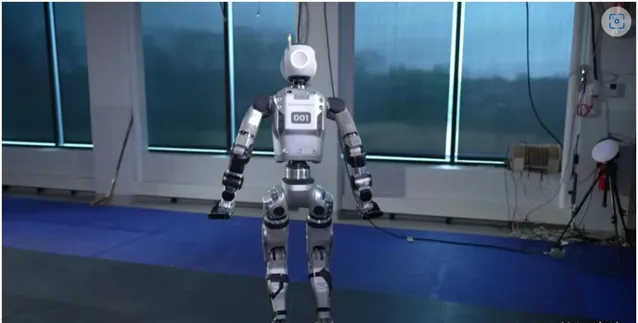
电动版Atlas「复活」
图片来源:All New Atlas视频截图
特斯拉的人形机器人Optimus、小米的「铁大」以及国内众多人形机器人厂商,大都选用了电驱动系统,随着波士顿动力的加入,这一驱动系统已经成为主流路线。
在新一轮的人形机器人热潮中,特斯拉本身在自动驾驶领域的软硬件积累,使得Optimus几乎代表了最先进的技术路线,引领着人形机器人的发展方向。目前Optimus已经「进厂打工」,综合市场上其他的人形机器人产品我们可以判断,当下人形机器人的技术方向仍旧在「专用」路线。随着软硬件技术的进步,人形机器人将更加智能化和自主化,能够理解复杂指令,适应不断变化的环境,并在没有人类直接干预的情况下执行复杂任务,即走向最终的「通用」目标:具身智能。
在2024年的世界人工智能大会上,人形机器人"十八金刚"赚足了眼球。这预示着人形机器人在人工智能的加持下向前迈了一大步,同时引发了市场对人形机器人大规模商用潜力的深入探讨。

2024年世界人工智能大会人形机器人「十八金刚」
图片来源:央视新闻
目前,人形机器人的高成本是其大规模商用面临的主要障碍。 制造人形机器人需要众多高精尖的硬件:高性能的伺服系统、减速器、传感器和控制器等核心零部件。这些硬件的成本占据了相当大的比例,且不受产业链中游机器人本体和系统集成商的直接控制。因此,目前市面上的人形机器人普遍价格昂贵,低则十余万,高则百万元以上。
价格因素还导致目前人形机器人应用场景集中在B端。根据国内相关上市公司披露的数据,学校及科研机构、物流等行业占据人形机器人产品营收的大头,消费级人形机器人市场刚刚崭露头角。特斯拉的Optimus目前的应用也是「进厂打工」,尚未进入普通消费者的生活。
从今年的世界人工智能大会来看,人形机器人在B端的应用仍在扩展,从最初的工业自动化领域逐步渗透到教育、服务业等多个领域,一些C端家用的机器人也已经出现。可以说, 谁先解决了成本和价格问题,就占领了机器人大规模商用的先机。
技术创新是推动人形机器人发展的关键。人工智能技术,尤其是大模型技术,正在提升人形机器人的智能水平。人形机器人走向具身智能,决策时要调用视觉、听觉和触觉等多重感官。这就意味着, 人形机器人不仅要拥有感知和认知能力,还要有与物理世界交互的能力,以便达到决策后的精确执行。
当前,大模型技术在信息处理领域取得了显著进展,但在人形机器人的认知能力、环境模拟和适应现实物理环境方面,其潜力尚未得到充分挖掘,这些能力对于实现人形机器人的具身智能至关重要。
此外, 大模型的训练方法目前主要依赖于大量结构化数据集,现实物理世界中却存在大量的非结构化数据。 有实验就发现,在充满非结构化数据的物理环境中,同样一件物品换一个摆放的位置,人形机器人就有可能无法完成指定任务。可以说,单纯结构化数据的训练限制了人形机器人的自主学习能力,使得其当前的迁移和反思能力不尽人意。理想的具身智能系统应能够从经验中学习,通过与环境的交互不断优化其行为和决策过程。
因此我们可以看到, 工业和信息化部发布的【人形机器人创新指导意见】强调了以人工智能技术突破为引领的重要性。该指导意见提出了在人形机器人的"大脑"、"小脑"、"肢体"等关键技术领域取得突破的目标,并鼓励构建完善的技术创新体系,支持产学研用联合体,探索跨学科、跨领域的创新模式。 所谓「大脑」,即是人形机器人的环境感知、行为控制、人机交互能力,「小脑」为运动控制算法库,网络控制系统架构等技术。「肢体」即为目前占据大部分成本的关键核心零部件。
在人形机器人未来的发展路线上,仍存在着诸如人形机器人是否必须是人形,人形机器人到底是否需要通用智能,以及究竟是软件适配硬件还是硬件适配软件等等争论。如果说,大模型的热潮带动了市场对人形机器人的未来憧憬,那么人形机器人的软硬件交叉性,决定了憧憬变为现实的使命,需要多个学科和产业合力完成。走向科幻情节中的人机共生时代,还有很长一段路要走, 这条路上虽荆棘丛生,但同样商机无限。












