文|大核有料
編輯|大核有料
深海礦區蘊藏著極為豐富的戰略金屬、能源和生物資源,而資源調查、勘探是深海資源開采前的重要基礎性工程。深海潛航器作為掌控深海礦產資源調查主導權的重要裝備,是拓展深海調查能力、提升綜合作業能力的重要手段。

深海潛航器主要分為無人水下機器人和載人潛水器2大類,而無人水下機器人又可細分為遙控式水下機器人(RemotelyOperatedVehicle,ROV)、自主式水下機器人(AutonomousUnderwaterVehicle,AUV)、水下滑翔機、水下拖曳系統等。

其中,ROV透過臍帶纜傳輸訊號和動力,可以實作小範圍水下精細定點局部觀察和采樣作業,如采集生物和海底沈積物樣品、布放小型海底觀測站等,同時亦受臍帶纜的制約,作業範圍和航行靈活性受限。
AUV內建能源(電池),在確定水下航行路徑後可按照自主程式完成大面積的搜尋和調查活動作業,但其數據傳輸、自動化控制和導航都面臨較多挑戰。
深海自主/遙控式水下機器人(AutonomousandRemotely-operatedVehicle,ARV)融合了最新的ROV和AUV技術。
既能透過細微光纖進行資訊互動並實作遙控作業,又可以切斷光纖進行大面積水下探測或執行混合任務,其自主/遙控混合模式和探測作業一體化技術代表了可執行更復雜使命的第三代深海水下機器人的發展方向。
深海ARV可同時搭載光學、聲學、水文調查傳感器以及重力/磁力儀等,能為深海多金屬結核、熱液硫化物、冷泉和深海生物資源的調查等提供技術支撐。
作為新型的復合型水下機器人,ARV可以透過機械手和高畫質攝影機實作深海目標區域的視覺化作業,其在深海資源調查中具有重要的科研和套用價值,也是當前國際水下機器人的研究熱點。

那麽深海深海ARV系統的套用,在海洋資源的調查中,該如何解決目前難題,並實作無人化的遠端高效率協調作業呢?
«——【·深海ARV的系統·】——»
深海ARV系統兼具自主航行與遠端遙控能力,可執行AUV的作業模式,開展自主航行探測,依靠其搭載的超短基線定位系統(Ultra-ShortBaseline,USBL)、慣性導航系統(InertialNavigationSystem,INS)、都卜勒計程儀(DopplerVelocityLog,DVL)等核心導航和聲學調查裝置,獲取關鍵區域內高精度測深側掃及淺地層剖面探測數據。
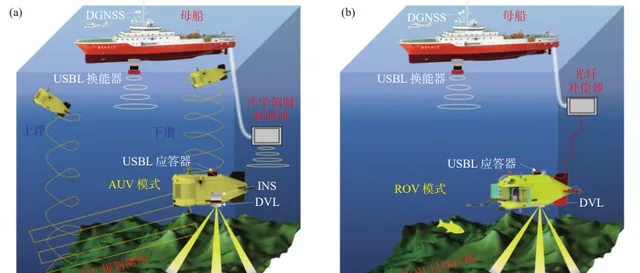
或在有纜遙控模式下,利用光纖微纜即時遙控,探測海底精細地形地貌、淺部地層結構、海底表面目標物,並對特定目標物進行取樣;還能在自主/遙控混合模式下執行自主探測任務,透過光纖微纜即時傳輸現場作業資訊,操控者可隨時切換自主航行及即時遠端遙控,高效靈活地完成作業任務。
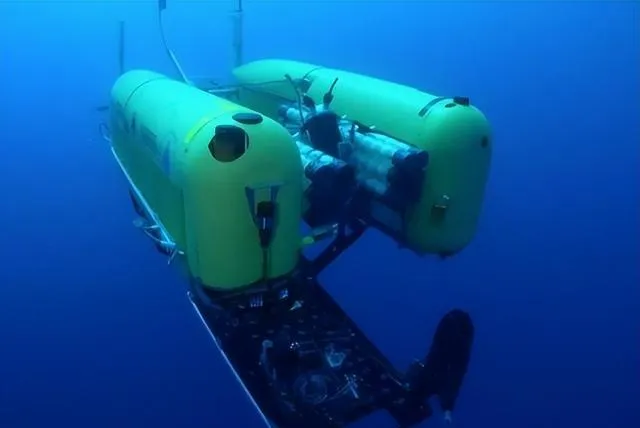
深海ARV系統一般由水面支持系統、纜控系統和ARV潛器本體等組成。以6000公尺級「問海1號」ARV為例,下面簡單介紹深海ARV的核心系統組成。
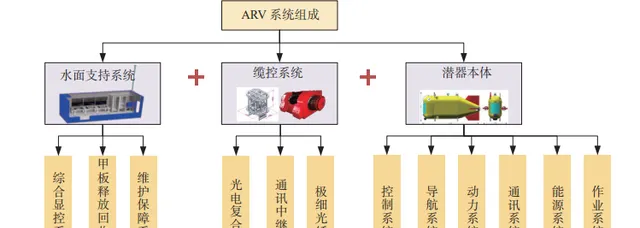
水面支持系統透過母船和作業團隊對深海ARV的正常作業、釋放和維護提供支持和保障,主要包括綜合顯控系統、甲板釋放回收系統以及維護保障系統等。
綜合顯控系統主要透過多屏顯視器對深海ARV的狀態資訊、導航資訊、姿態資訊和視訊影像等進行即時顯示和處理,並透過甲板遙控裝置對水下裝置進行遙控和下達作業指令。

甲板釋放回收系統主要依靠母船的A型架、絞車、光電復合纜及其他輔助裝置對ARV進行釋放和回收。維護保障系統主要對ARV、水下調查裝置和光電復合纜等常用裝置進行日常維護、檢修和測試等。
纜控系統主要透過水下聲學通訊中繼器連線母船與水下潛器。ARV的通訊中繼器上端透過光電復合纜與水面綜合顯控系統相連。

在ROV模式時,通訊中繼器的下端透過極細光纖與深海ARV相連,完成水面和水下資訊的快速傳輸。而在AUV模式時,通訊中繼器切斷光纖,利用水下聲學通訊裝置與ARV進行資訊互動。
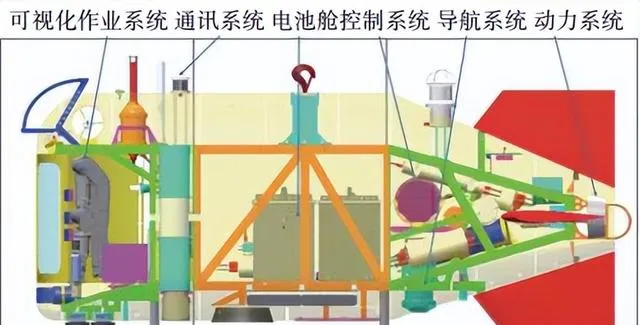
深海ARV的潛器本體除自身的機械結構外,按照功能一般劃分為:控制系統、導航系統、動力系統、通訊系統、能源系統、視覺化作業系統以及搭載的多種聲學探測傳感器。
控制系統可自主執行使命或接收水面控制命令,與推進單元連線完成控制回路,與探測系統連線完成探測傳感器的控制。
透過電腦結合航行控制單元、資訊采集處理單元以及深度、姿態和水密監控系統實作對ARV的操控,可以保障ARV定向、定深、定高的完成巡線作業,也可以切換手操模式控制水下視覺化作業系統進行遙控作業。
水下定位和導航資訊是保證深海ARV安全布放、回收和有效完成任務的關鍵,也為ARV多場景動態測量、采集和傳遞資訊提供了必不可少的空間位置參考。
ARV的導航系統主要包括長量程超短基線聲學定位信標、慣性導航定位系統、聲學都卜勒計程儀、高度計、壓力計、避碰聲吶以及相關的輔助裝置。
水下ARV的動力系統主要執行推進控制命令,完成水下機器人的精確運動控制,透過搭載的電池組動力能源,由尾部舵板上的2個主推進器提供推力,由艏部垂直和測向各2個槽道推進器保持潛器的平衡、升沈和轉向。
作業系統又分為視覺化作業系統和聲學探測系統,主要包括:水下高畫質攝影機、機械手、取樣工具、聲學探測傳感器以及根據任務需求搭載的下潛/上浮拋載裝置。

深海ARV為了節省能源,通常利用下潛拋載實作負浮力的螺旋下潛,到達指定深度後釋放下潛拋載,此時ARV為零浮力狀態進行作業,完成作業任務後,透過拋棄上浮拋載實作正浮力的螺旋上浮。
除上述系統外,ARV還搭載了包括光端機、聲學通訊系統等相應的通訊裝置,以及根據不同任務搭載的多種深海調查裝置。

«——【·深海ARV關鍵技術·】——»
不同於傳統的AUV和ROV水下機器人,深海ARV作業具有超遠距離、混合控制及輕型作業的特點,其整體系統的設計需要特別考慮聲學/光纖通訊,主動導航/被動跟蹤,自主模式/遠端遙控作業等因素。
除傳統的耐壓抗腐蝕材料、長距離動力傳輸技術、遠端數據傳輸及航行控制等關鍵技術外,深水ARV還需額外關註微細光纖微纜傳輸技術、高密度電池技術以及自主/遙控混合控制等技術。

深海ARV主要套用的微細光纖纜傳輸系統由微細光纖纜線團、大功率光端機及光纖剪下機構組成。
「問海1號」ARV系統標配2個30km無軸內放線式微細光纖纜線團,分別安裝於潛器與壓墜器,單個線團輸功率衰減約12dB,破斷力80~120N。
目前ARV潛器理論最大通訊距離可達80km。透過ARV的通訊中繼器管理近海面端光纖,提升了ARV光纖連續通訊的穩定性,同時搭載其他聲學裝置,可實作與ARV的資訊傳輸和定位。
由於ARV相較於AUV具備一定的作業能力,作業時的平均能耗也相對較高,因此,為提升ARV潛器的作業能力,需要開發耐低溫、耐高壓的高能量密度的能源電池組。

目前套用較為普遍的是磷酸鐵鋰電池與鋰離子電池,前者具有良好的熱穩定性與化學穩定性,安全性較高;後者則具有良好的能量密度及放電速率,但安全性不及前者。
「問海1號」ARV系統采用濕艙耐高壓穩定性高的磷酸鐵鋰電池組,磷酸鐵鋰控制/動力電池組由1組控制電池組、1組動力電池組及專用充電機等組成。
控制電池和動力電池獨立封裝,充分提高安全性,最佳化能耗,減小推進幹擾,分別為潛水器控制系統及動力系統提供DC48V及DC110V電源。電池組總容量24kWh,自主航行模式下可支撐潛器航行30h以上。
航行控制系統是ARV的重要組成部份,用於海底精細遙控作業、預編程自主路徑規劃、系統故障檢測及應急處理,實作復雜海底地形條件下的穩定航行及傳感器控制,是保證潛器安全執行的監控中心。

航行控制艙是控制系統核心,主要完成對載體所有裝置開關的直接或間接控制,所有裝置的直接或間接通訊,所有控制指令的釋出。
在航行控制艙內包含電源轉換、電源分配、ARM核心板、避碰電腦、ARM控制輔助板、交換機、光端機等電路板。

控制程式模組分為4層,每層實作相對獨立的邏輯功能:人機互動層主要完成操作員指令下達及潛水器狀態反饋;使命層則實作依據使命任務生成行為指令,對系統發生的各種故障進行處理;行為層負責實作潛器的航向、航速、深度、高度等控制演算法;執行層負責實作本系統所安裝裝置/傳感器輸入數據的讀取解析和對它們的操控等。

未來隨著AI技術的發展,ARV系統的智慧化程度將不斷提升,其在應對復雜海底環境及特殊工作任務的工作能力也將進一步提升。
«——【·深海ARV在地質資源調查中的主要套用·】——»
如圖所示,ARV到達工作區域後,首先進行工作區域環境調查,包括全水深溫鹽深(CTD)及海底地形地貌探測,CTD數據主要用於核算ARV潛器浮力,地形地貌數據用於ARV航路規劃。
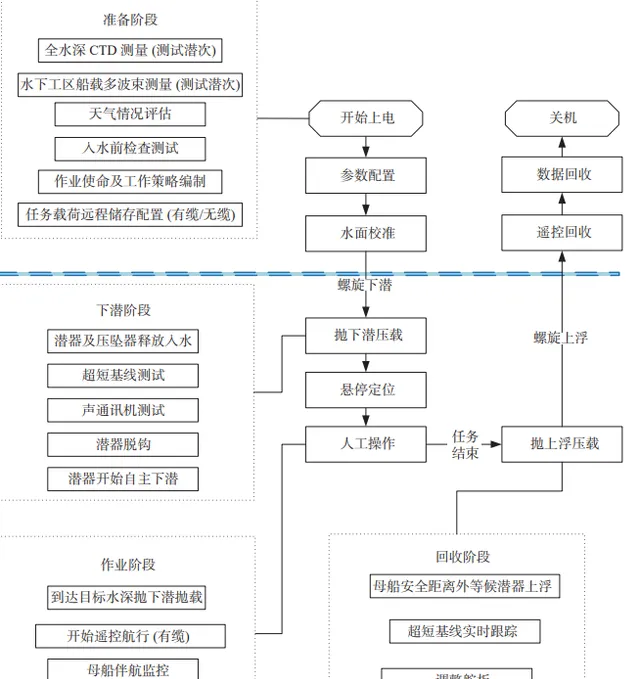
準備階段時,將壓墜器置於潛器頂部,期間註意人員止蕩,防止壓墜器搖擺角度過大。
完成準備工作後ARV作業轉入下潛階段,入水後繼續釋放光電復合纜。

期間光纖壓墜器與潛器同步下潛至目標區域,到達指定深度後,釋放器脫鉤,潛器和壓墜器依靠重力分離,壓墜器懸停於分離位置,潛器依靠重力繼續下潛,下潛到近底時,拋掉下潛壓鐵,轉入懸停階段,等待作業指令。
ARV在自主模式下作業任務結束或出現故障後,潛器將自動執行拋載上浮程式,在有纜遙控模式下可手動執行拋載上浮程式。

潛器下潛任務結束後,切斷光纖,拋掉上浮壓載,開始上浮階段,壓墜器獨立回收。
深海ARV的定點作業與負載拓展能力相對傳統的多載ROV較弱,但其水面支持系統整合度高,對不同作業支持母船的適配性較好。視覺化作業分系統是ARV的重要組成部份,用於完成采樣、布放作業等任務。
深海ARV潛器坐底作業時,艙門開啟後機械手伸出作業,照明主要由左艙門的門掛照明燈、航行照明燈及雲台照明燈提供,雲台照明燈可跟隨雲台調整角度,以上照明可以覆蓋機械手作業範圍。
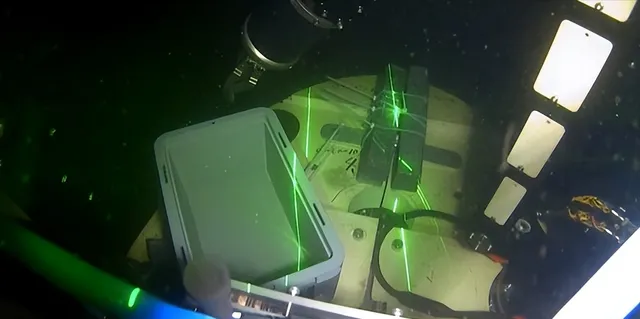
機械手作業時,其高畫質攝像主要由雲台相機完成,高畫質攝像可跟隨雲台多角度拍攝機械手作業,可即時直播並回傳到行動作業中心,航行攝像及標清相機作為輔助攝像,為機械手提供多個視角,方便樣品采集及回收落位。雲台上雷射尺可提供水下參照物的尺度。
如圖所示,當ARV處於有纜遙控模式下,基於水面即時遙控航行,能夠根據調查需求采集表層沈積物柱狀樣及海洋生物樣品。
當ARV到達測線區域時,透過母船搭載的超短基線定位系統獲得其自身的準確位置,ARV依靠聲學通訊和細微光纖進行通訊和數據傳輸,並按航行指令去往上線點。
「問海1號」ARV搭載的淺地層剖面儀和測深側掃聲吶采用Edgetech公司專門為潛器設計開發的2205系列,具有體積小、功耗低、整合度高、模組化配置的優點,其聲學換能器在ARV上的分布如圖所示。
其側掃工作頻率為230/540kHz,測深工作頻率230kHz;淺地層剖面儀的工作頻帶2~16kHz,穿透能力6~80m,分辨率6~10cm。如圖所示,「問海1號」ARV可在艏部搭載單獨封裝小型化重力儀。
重力儀的耐壓艙采用頂部半球形、底部平端蓋設計,透過固定支架與潛器框架固定連線。磁力儀電子艙安裝在ARV內部,使用安裝支架與潛器框架固定連線。
磁力儀探頭支架透過法蘭與潛器尾部預留機械介面連線,兩部磁力儀探頭分別架設在支架中段與末端。ARV進行水下重磁數據采集時,采用定高或定深模式按照規劃測線實作近海底的高精度重磁測量。
在2022年3月22日−4月26日,「問海1號」ARV累計進行17個潛次任務,包括9個水下聲學重磁同步測量作業航次,完成試驗水下測線12條,共計190km。
ARV單潛次最大連續航行時間超過21h,最大航程45km,光纖微纜模式下最大航行距離為21km。
整個任務期間,「問海一號」ARV的控制系統、導航定位系統、能源推進系統等工作狀態正常,潛器獲得了近海底高精度的聲學和重磁探測數據。
基於無人潛水器平台的重磁、地形地貌及淺部地層結構同步測量,是中國在海洋地質調查方法上的一次重要創新與突破。
而深海ARV能夠有效支撐水下重磁測量系統穩定執行,實作對地球重力場磁場等資訊的精細化測量,為海洋資源勘探和水下多物理場匹配導航研究提供有力的裝備及技術方法支撐,具有重要的工程套用意義。
«——【·結語·】——»
目前,深海ARV的一系列裝置多處於研發和試驗階段,其未來的發展依賴於水下能源技術、通訊技術、人工智慧控制技術、一體化協同技術等,隨著深海礦產資源的調查與開發戰略需求的深入拓展,深海ARV在資源調查領域中將發揮越來越關鍵的作用。
深海調查領域作業範圍繼續拓展,網格更加精細,深海ARV作為一種新型的水下機器人,未來將主要套用於超深水、極地、海溝、等極端海洋環境下的水下探測。
隨著深海ARV的耐壓深度、能源系統、導航系統及避障系統不斷的完善,其深海調查的作用範圍將更加廣泛。借助於極細光纖,可以靈活操縱ARV進行精細網格作業,獲得更多高密度的近海底測量數據。
從目前發展趨勢來看,深海ARV的功能越來越趨向於智慧化、網路化和自主化。
結合最新的人工智慧影像辨識技術,深海ARV更加具有智慧和自主作業能力,透過網路化的水聲通訊和光纖微纜,將能夠自主化的在復雜深海環境航行,具備在復雜環境中安全生存、精確探測和作業的能力。











