
近年來,全球癌癥的發病率顯示出持續上升的趨勢,這一現象引發了廣泛關註。隨著人口老齡化、生活方式變化以及環境因素的影響,癌癥成為全球健康的主要威脅之一。為應對這一挑戰,主動靶向癌癥治療策略在過去十年中逐漸成為科研領域的熱點。研究人員們正努力探索可直輸藥物至病竈的方法,以期實作更精準治療並減少對正常組織的傷害。
磁導航平台引導的磁性微載體治療技術作為新的癌癥靶向策略由此在近年來得到迅速發展。然而,這種技術面臨磁場在體內深處迅速衰減的問題,影響了其精確性和效率。相較之下,MRI導航平台的偶極子磁場導航(DFN)技術展現出潛力,被視為領域突破,未來有望解決現有問題。
DFN透過在MRI裝置中利用軟鐵磁球產生梯度磁場,為藥物攜帶的磁奈米顆粒指引精確路徑,提升了靶向性。但同時,該技術也存在對MRI磁場造成幹擾影響成像品質,以及強磁場環境為裝置的材料和驅動機制帶來重大挑戰的問題。
前不久,來自南京航空航天大學航空航天結構力學及控制全國重點實驗室與蒙特婁大學工學院奈米機器人實驗室的研究人員面向癌癥治療藥物靶向遞送的痛點、難點進行研究,並提出了一種核磁成像環境下壓電機器人系統驅動的動態偶極子磁場導航(DFN-D)系統。該系統解決了載藥磁奈米顆粒(MMPs)操控和磁共振成像之間的矛盾,並透過實驗驗證了DFN-D系統在基於MRI裝置的靶向醫療系統中的套用潛力。

該研究成果的相關論文以「A Piezoelectric Robotic System for MRI
Targeting Assessments of Therapeutics During Dipole Field Navigation」為題發表在國際機電一體化領域TOP期刊【IEEE/ASME TRANSACTIONS ON MECHATRONICS】上,並入圍該期刊2022年度最佳論文獎。

南京航空航天大學-航空學院精密驅動研究所-航空航天結構力學及控制全國重點實驗室固定人員時運來副教授為第一作者,博士生李寧為通訊作者。該研究得到了中國國家留學基金委、國家自然科學基金(NO.51975282)和蒙特婁大學工學院機器人實驗室的支持。
接下來,一起來和機器人大講堂深入探索這一研究成果!
▍建立理論模型,進行系統設計
DFN-D系統的理論模型構建是為了在MRI裝置的強均勻磁場中實作鐵磁球的精確導航。
設計過程中嚴格考慮了與MRI的相容性,綜合評估了鐵磁球的尺寸、導航位置、磁化響應、磁場強度、以及梯度場的分布特點,並兼顧了MR成像的遠端定位和預期的移動軌跡等關鍵因素。
在理論模型的開發階段,研究人員首先深入探討了MRI裝置內部高強度均勻磁場的特性及磁梯度生成機制。鐵磁球置於MRI環境中,其對磁場的反應透過體積磁化率得以量化,而磁梯度則表征了磁場沿特定方向(例如z軸)的空間變化率。
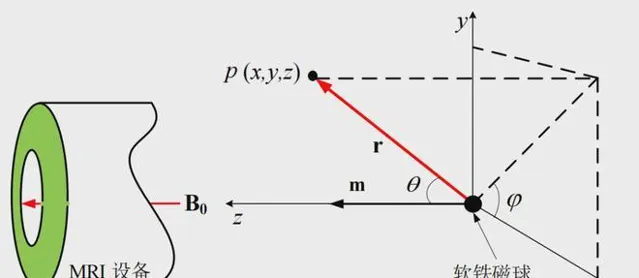
MRI 腔中的軟鐵磁球座標系
為了確立理論模型,研究團隊分析了鐵磁球在MRI環境下產生的磁場效應,並推匯出了一系列公式來描述磁梯度的方向和大小。這些數學運算式細致地考慮了鐵磁球的定位、MRI裝置內的磁場參數以及球體對磁場布局的影響等要素。
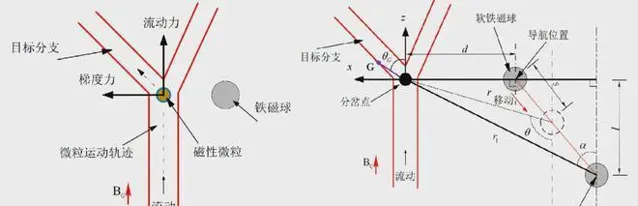
DFN-D 方案。(a)微粒子受到兩種力的作用:磁化球引起的梯度力和流動力。(b)為 DFN-D 方案。
理論模型確立後,研究團隊透過一系列實驗來驗證模型的預測準確性和系統的操作可靠性。實驗不僅對DFN-D系統的效能進行了全面評估,還對其做了進一步的調整和提升。透過這些實驗驗證,研究團隊確保了理論模型的有效性,並對DFN-D系統的設計和效能進行了必要的完善和最佳化,以期達到更高的導航精度和操作穩定性。
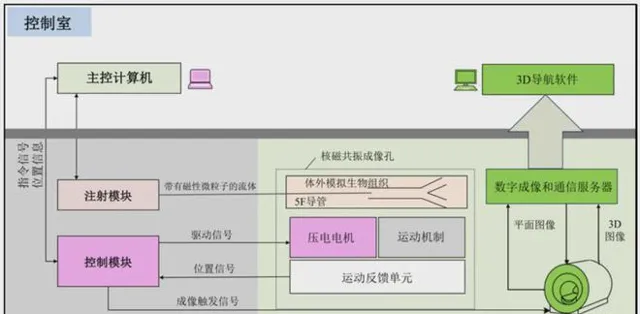
DFN-D 系統的架構和數據流
▍DFN-D機電系統設計與實驗平台構建
根據上述理論分析與理論模型建立,研究人員設計並制造了一種DFN-D機電系統,以實作體外模型內部粒子的精準轉向和MR成像。
在設計DFN-D機電系統時,研究人員充分考慮了超聲電機的獨特優勢,包括其不受磁場幹擾、電磁幹擾小、斷電自鎖、響應速度快以及定位精度高等特性。並最終決定使用超聲電機用於構建DFN-D系統和相應的實驗平台。
DFN-D 系統樣機
NOTE:此處控制器遮蔽被開啟以顯示其內部結構,在進行實驗之前重新遮蔽好
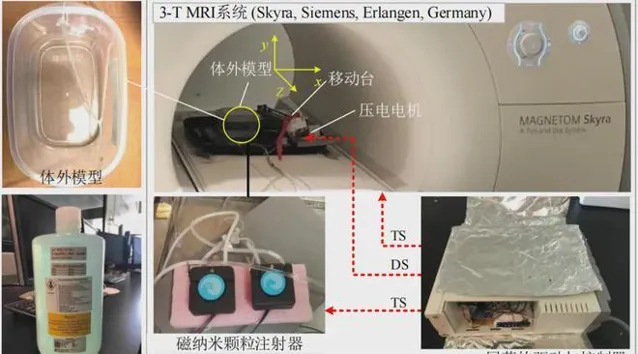
DFN-D機電系統的架構包括一個用於精確控制軟鐵磁球位置的壓電機器人,一個用於產生驅動訊號並收集運動反饋資訊的控制器模組,一個用於註射治療劑的註射模組,一個執行運動和註射控制程式的主控電腦,一個模擬血管網路的體外模組,以及一個用於與控制器模組物理連線的核磁共振掃描器觸發介面。
實驗平台構建則包括一個核磁共振成像裝置,一個用於與控制系統通訊的USB電纜連結器,以及一個用於影像采集和分析的3D Slicer導航軟體。
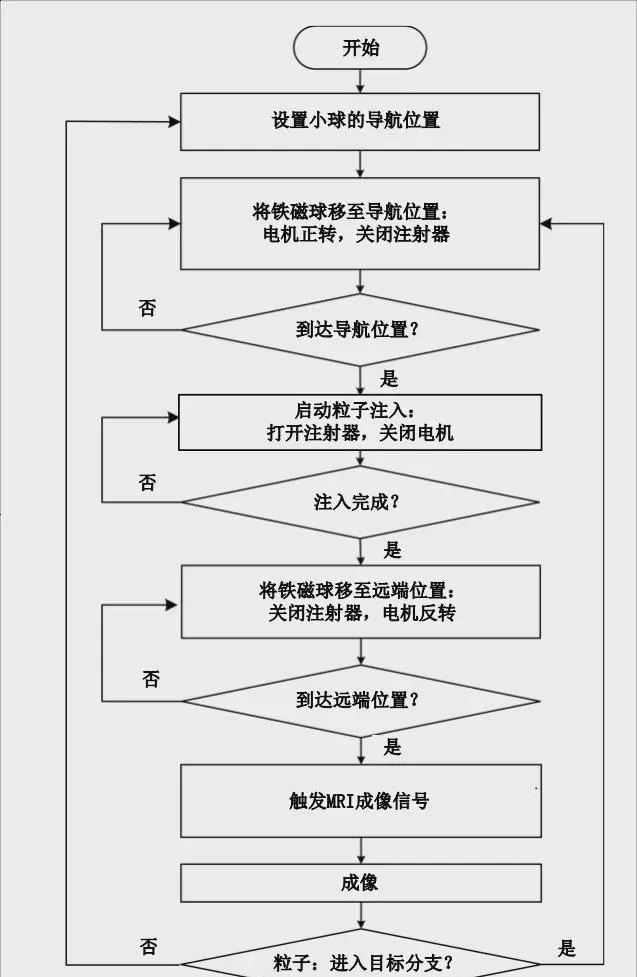
DFN-D 工作流程
在工作流程規劃方面,研究人員首先將軟鐵磁球移動到導航位置,然後啟動粒子註入,隨後將球移動到遠端位置,並觸發磁共振成像。透過獲得的核磁共振影像,評估粒子的操控效果。如果粒子操控成功,工作流程進入下一個迴圈,否則將重設鐵磁球的導航位置。
運動台系統是DFN-D系統的核心元件,透過壓電機器人實作粒子在導航位置和遠端位置間的精確快速移動控制。為了保證MRI相容性,所有元件都采用了非鐵磁性材料,並透過導波管降低核磁共振成像的雜訊幹擾。運動台則采用鋁型材導軌、木材和工程塑膠制成,搭配陶瓷軸承和塑膠帶作為傳動機構,保證系統的結構剛度和穩定性。

壓電電機驅動的運動台
DFN-D系統中,采用某於嵌入式芯片開發的驅動器驅動,整個DFN-D工作流程采用Arduino Mean2560板進行控制。透過直流電源供電,並采用了多重絕緣鋁箔和金屬編織線等措施提高MR成像的相容性。整個DFN-D機電系統設計和實驗平台構建,充分利用了超聲電機的優勢,為粒子轉向操控和MR成像的交替執行提供了可靠的技術支持,為進一步的研究和套用提供了一種新的解決途徑。
▍進行實驗測試,驗證系統套用潛力
為了評估DFN-D系統的效能,研究團隊進行了一系列實驗,包括定位特性測量、磁共振成像品質評估以及體外DFN-D實驗。
在定位特性測量實驗中,研究人員手動設定了定位控制,使其在10-80 mm/s的移動速度範圍內工作,並透過測量運動台的位移來評估系統的定位精度。實驗結果顯示,透過采用變速運動控制策略,即前90%的行程使用高速80 mm/s移動,其余部份則以低速10 mm/s移動,系統的定位誤差能夠控制在0.5 mm以內,從而在保持高速移動的同時,實作了較小的定位誤差。

定位誤差和速度的關系
在磁共振成像品質評估實驗中,研究團隊考察了DFN-D系統對磁共振成像品質的影響。他們在體外模型的位置放置了一個周期性影像品質測試模型,並分析了在不同狀態下訊雜比(SNR)的變化。實驗結果表明,當壓電電機執行時,影像的訊雜比降低了19.2%,而在電機關閉的情況下,將軟鐵磁球移至遠端位置時,訊雜比進一步降低了21.6%。盡管如此,磁共振影像並未出現明顯的失真和偽影。此外,透過將鐵磁球從導航位置移開不同距離進行成像測試,研究人員發現,當鐵磁球位於200 mm遠的位置時,影像失真最小,僅為2.2%,這足以確保磁奈米顆粒(MMPs)轉向的正確性得到驗證。
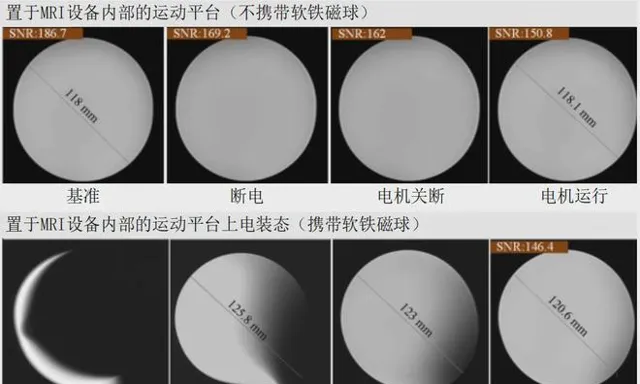
八種狀態下圓柱橫截面的代表性 T1W-Spin 回波影像
在體外DFN-D實驗中,研究人員驗證了粒子操控的可行性。按照預定的方案,他們將球移動到遠端位置後註入MMPs。實驗采用了T1W-SE診斷成像序列來追蹤註入的粒子聚集體。結果顯示,在沒有導航的情況下,粒子聚集體隨機進入子分支;而在使用DFN-D系統進行導航後,兩個分支的粒子聚集體導航成功率均達到了100%。
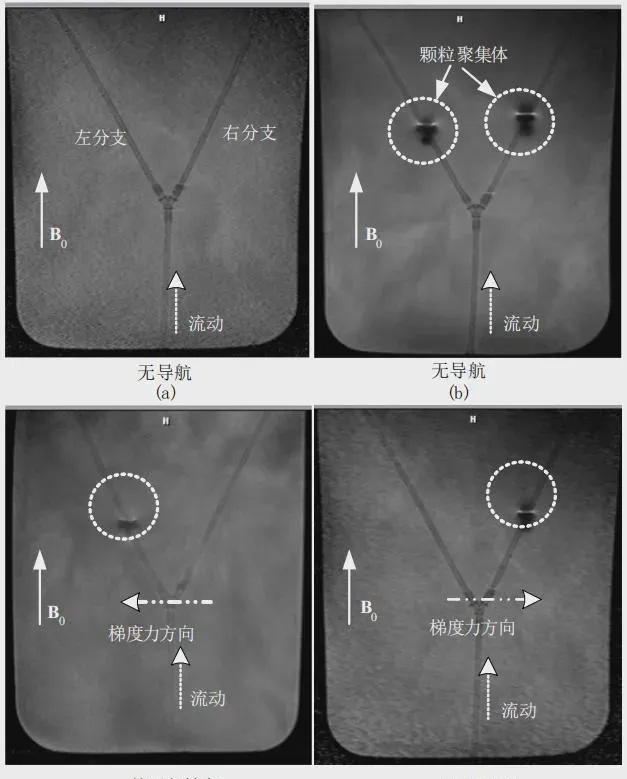
體外模型中註入粒子聚集物的 MR 成像: (a)顯 示了粒子註射前體外模型的 MR 成像; (b)顯示顆粒集聚物( 聚集註射次數=4)在無導航情況下隨機進入不同分支的 MR 成像。在(c)和(d)中( 在每個圖中,聚集註射次數=2),顆粒聚集分別被導航到左側和右側目標分支的 MR 成像。
以上種種實驗研究表明,DFN-D系統能夠精確控制運動台的定位,並且在運動過程中對磁共振成像品質的影響較小。透過最佳化運動台的速度和位置,系統在保證成像品質的同時,實作了精確的粒子操控。體外實驗進一步證實了DFN-D系統在操控磁性微顆粒方面的高效性和準確性,為其在相關研究和臨床套用中提供了有力的技術支持。
參考文章:
https://ieeexplore.ieee.org/document/9142406











