本文內容來源於【測繪學 報】2023年第10期( 審圖號GS京(2023)1931號 )
鄰近海底基準站座標時序聯合處理模型
孫悅 1,2 , 薛樹強 2 , 韓保民 1 , 肖圳 1,2
1. 山東理工大學建築工程與空間資訊學院, 山東 淄博 255049;
2. 中國測繪科學研究院, 北京 100036
基金計畫: 嶗山實驗室科技創新計畫(LSKJ202205100;LSKJ202205105);國家重點研究計劃(No.2020YFB0505802)
摘要 :海底基準站復測觀測可用於海底構造和海底地震等災害研究。然而, 受觀測條件和供電等因素影響, 難以實作長時間不間斷觀測。為解決時間序列觀測中新舊海底基準站替換位移補償和站點偏移量計算問題, 可采用中心點法求取相對於海底基準站網的虛擬中心點座標的位移量, 進而構造海底基準座標時序, 以監測海底構造運動。針對相同的問題, 本文借鑒地球參考框架維持方式, 直接利用可能存在間斷的海底基準站網時序觀測數據, 提出了基於參考協定歷元的海底基準座標時序多站聯合處理模型, 即在一個區域基準站網內, 各站點座標作為局部參數, 而站速度作為公共參數。本文方法適合於海底參考框架的建立與動態維持, 利於對區域網內各站點座標時序實施精細品質控制。結果表明, 本文方法可以代替中心點法, 且抗差估計結果更為可靠, 與中心點法確定的海底基準站年速度估計之間的差值平均為3 mm/a, 可為國家海底空間基準維持提供一種途徑。
關鍵詞 :海底大地測量 地殼運動 站速度 抗差估計 災害監測

引文格式: 孫悅, 薛樹強, 韓保民, 等. 鄰近海底基準站座標時序聯合處理模型[J]. 測繪學報,2023,52(11):1835-1843. DOI: 10.11947/j.AGCS.2023.20220203
SUN Yue, XUE Shuqiang, HAN Baomin, et al. Multi-station joint processing model for seafloor geodetic coordinate time series[J]. Acta Geodaetica et Cartographica Sinica, 2023, 52(11): 1835-1843. DOI: 10.11947/j.AGCS.2023.20220203
閱讀全文 :http://xb.chinasmp.com/article/2023/1001-1595/20231102.htm
引 言
GNSS的廣泛套用,使得陸域地殼運動觀測網路已經非常密集,且實作了長期連續觀測 [1 -3 ] 。1980年提出的GPS與聲學測距相結合的聯合觀測系統讓建設高精度海底大地測量的海底參考點成為可能 [4 ] 。經過多年的發展,該方法理論與技術得到了不斷的完善 [5 -7 ] 。水下定位精度主要受復雜海洋環境的影響,特別是海洋聲速場時空變化誤差的影響,例如,季節性溫度和流場變化會對聲速剖面整體產生影響等 [8 -9 ] 。近年來,海底高精度定位方法也不斷完善 [10 -11 ] ,實作了聲速誤差的有效補償 [12 -13 ] 。需要指出的是,海底基準網采用對稱設計,有利於減小聲速誤差影響 [1 , 14 -15 ] 。
文獻[16]提出在海底布設多個基準點構成的基準網,其基準點均勻地分布在半徑近似等於水深的圓上,可實作更為準確的海底地殼運動監測。海底多站聯合觀測技術一直沿用至今,已實作海底位移監測和海底板塊擴充套件監測 [17 -18 ] 。由於供電不足等原因,海底基準站難以全部正常工作,更難以保障長時間連續觀測。倘若海底一組基準站即將供電不足,則需要重新布站或更換電池,考慮到水下作業的固有成本和技術難度,通常在每個海底基準站附近安裝一個新的海底基準站 [19 ] 。中心點法是目前國際上開展海底地殼運動監測普遍使用的方法,而換站補償是該方法必須采用的策略。當然,原位觀測是海底基準維護的理想途徑,但實作原位觀測具有較高的深海工程作業難度。因此,聯合多個間斷基準站座標時序獲取海底構造運動資訊就成為實作海底大地測量監測的重要課題,文獻[15]提出采用海底基準站網的中心點作為虛擬觀測,透過估計虛擬觀測中心點的偏移量進行形變監測。近20年太平洋西岸附近建立的世界上最為密集的地殼運動觀測網路清晰記錄了一系列大型地震引起的形變等,實作了災害過程模擬 [20 -22 ] 。文獻[23]利用日本東北大地震前的數據對日本海底地殼運動觀測系統進行了評估,結果表明,海底基準站網平面定位精度已達到厘米級,高程方向定位精度也可達到10 cm。
綜上所述,目前國際上主要采用中心點法和新舊基準站換站補償方法,實作海底高精度、長時序、連續觀測,並以此為基礎開展海底地殼運動監測。雖然虛擬中心點方法可用於海底區域地殼運動監測和形變分析,但無法獲取海底基準站網中各基準站協定座標,無法為海洋大地測量和海洋導航提供參考框架,也難以實施精細化品質控制,因此筆者認為這不是海底基準建立與維持的最佳途徑。為此,筆者借鑒國際地球參考框架(ITRF)構建方式 [24 ] ,提出了基於協定參考歷元的站座標與站速度聯合估計方法,可為水下導航定位服務提供即時、動態、高精度參考基準。
1 海底座標時序多站聯合處理模型
假設整體海底基準網與地殼存在一個共同的運動速度,設定一個參考歷元(建議采用觀測周期內的中間時刻),並將每個站點在該參考歷元處的座標作為未知參數,與海底基準網的整體運動速度進行聯合估計,簡稱聯合估計模型。設有 I 個海底基準站,第 i 個海底基準站在 t 0 時刻的座標 x i 0 ,假設所有海底基準站在該時刻具有相同的速度 v 0 , 則 t 時刻的座標為
 (1)
(1)
式中, x i 0 ( i =1, 2, …, I )為第 i 個站在參考歷元 t 0 的協定座標,為未知參數;速度 v 0 為在參考歷元 t 0 的協定速度; δ PSD 為地質災害引起的非線性部份,如地震的震後形變等。一旦獲得各測站的協定座標和協定速度,無論該測站是否處於工作狀態,都可實作該基準站座標維持。考慮到數值計算需要和大地測量習慣,上述時間單位建議采用年。
為便於討論,下面僅考慮平面方向時間序列,並暫不考慮測站非線性變化(以E方向為例)。對於第 i 個海底基準站,假設存在 J 個歷元觀測,則可構造以下觀測方程式
 (2)
(2)
式中, ε 為觀測與模型不符值,主要包括觀測隨機誤差、區域構造形變及地震震後形變等影響。等號左側為觀測量,記為 L ,右側 x i 0 和 v e 0 為待估量,則式(2)的最小平方解為
 (3)
(3)
式中, P 為觀測權陣; A 為觀測設計矩陣; 1 J×1 為由1構成的( J ×1)維列向量; 0 J ×1 為由0構成的( J ×1)維列向量。
海底觀測時間序列偏離線性運動模式,一般是由地震等地質災害事件引起的。此時,可考慮采用地震的震後形變模型來構建測站非線性運動。對於高程方向,還應考慮年周期、半年周期等非線性周期性訊號 [25 ] 。然而,受限於海底定位精度及復測周期,目前海底基準站網還很難實作高程方向時序分析。因此,本文主要考慮海底水平構造運動,並將海底地震等引起的異常當成粗差觀測處理。無論是觀測異常,還是各種地質災害引起的時間序列異常,都可使用抗差估計策略予以處理。本文采用以下IGGⅢ抗差估計 [26 -28 ]
 (4)
(4)
式中, P = diag( p 1 , p 2 , … p n )為原始權, p i = p i w ( v i ), p i 為觀測矩陣 P 的對角元素, v i 為觀測殘留誤差, w ( v )為等價權函式
 (5)
(5)
IGGⅢ方案擁有正常權段、可疑降權段,以及淘汰權段,可充分利用觀測數據,具有較強抗差性,其中, k 1 =1.5, k 2 =2.5為常用推薦值。
與中心點法不同的是,聯合估計模型使用全部海底基準站時序觀測,而不是虛擬中心點觀測時序,所有未知參數具有明確的物理意義,且與各站點相關聯。該模型的另外一個優勢是無須進行新舊換站聯測和換站時序補償。為實作海底地殼運動監測,引入重心基準構造一個參考基準網 X i ( i =1, 2, …, I ),即 [19 ]
 (6)
(6)
X
i
(
j
)
是第
j
個歷元的第
i
個海底基準站的座標,
c
(
j
)
不唯一,為此,引入以下重心基準條件

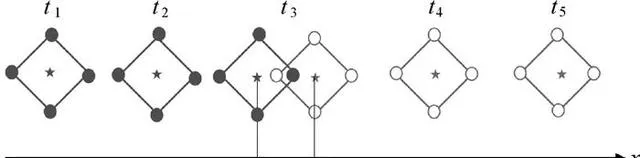
如圖 1所示,在舊海底基準網將要供電不足時安裝新海底基準網,二者都是局部基準網,共同構成整體基準網。局部基準網中心點之間存在一定的差值。為了確保上述中心點法監測海底地殼運動的連續性,需要透過新舊海底基準網同步觀測,得到中心點間的差值Δ x ,以後歷元啟動新海底基準站網,並將Δ x 補償到新海底基準網中心座標,即可保證中心點座標時序的連續性 [19 ] 。
|
|
|
圖 1 更換海底基準站 Fig. 1 Replacement of seabed reference station |
|
圖選項 |
換站補償後的中心點法是海底構造監測的一種有效方法,采用重心基準有利於區域構造形變分析,但由於缺少如ITRF控制下的長期基準約束,不利於長期、大尺度海底構造分析。中心點法可以平滑觀測雜訊,但某個站點異常可被中心點平均化處理削弱而無法對其進行探測和分離,或者因其中少數站點異常,導致整個基準站組視為異常。此外,中心點座標時序為虛擬觀測時序,從而無法獲取各站點在協定參考歷元處的站座標估計和站速度。
2 試驗結果分析
文獻[19]公布了7個觀測站在2011—2020年的GNSS-A實測數據,其空間分布如圖 2所示。本文基於這7個站的觀測數據驗證本文方法的有效性。
|
圖 2 試驗區海底基準站分布 Fig. 2 Distribution of seafhor goodetic stations in the experimental area |
|
圖選項 |
2.1 中心點法及換站補償
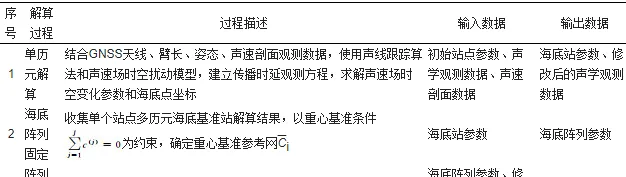
中心點法及換站補償對GNSS-A數據的處理策略見表 1,大致分成了3個環節。
表 1 數據處理策略
Tab. 1 Data processing strategy
表選項
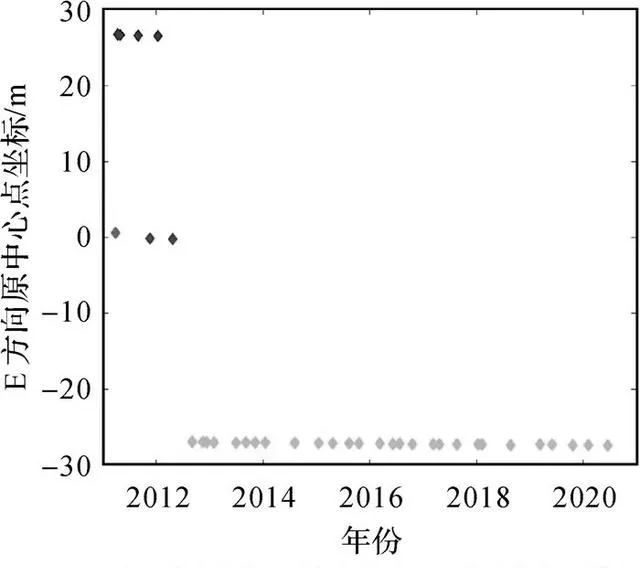
以MYGI站E方向為例說明換站引起的時間序列間斷問題。MYGI站在海底有8個基準站,編號分別是:M01、M03、M04、M05、M12、M13、M14、M15,在2011—2020年觀測期間發生了3次換站,本文透過開源的GARPOS軟體解算得到10年的虛擬中心點數據。中心點座標如圖 3所示,不同海底基準站網的中心點之間相差較大。因此換站導致原始海底觀測時序無法直接用於海底地殼運動監測。
|
|
|
圖 3 MYGI站原始中心點時間序列 Fig. 3 MYGI station original center time series |
|
圖選項 |
對虛擬中心點的偏移量時序進行最小平方擬合,即可得到海底基準網的整體運動趨勢和線性速度資訊。非線性部份主要代表地殼形變或地震等異常。如圖 4所示(以E方向為例),可以看到MYGI站整體符合線性運動趨勢和地殼整體構造運動特征,其中擬合直線公式為 y = vt +d x , v 代表局部海底基準網中心點的運動速度,d x 是最小平方擬合得到的座標改正數,文中所有中心點速度擬合直線均由上述方法繪制。
|
|
|
圖 4 MYGI站中心位移與最小平方擬合 Fig. 4 MYGI station center displacement and least square fitting |
|
圖選項 |

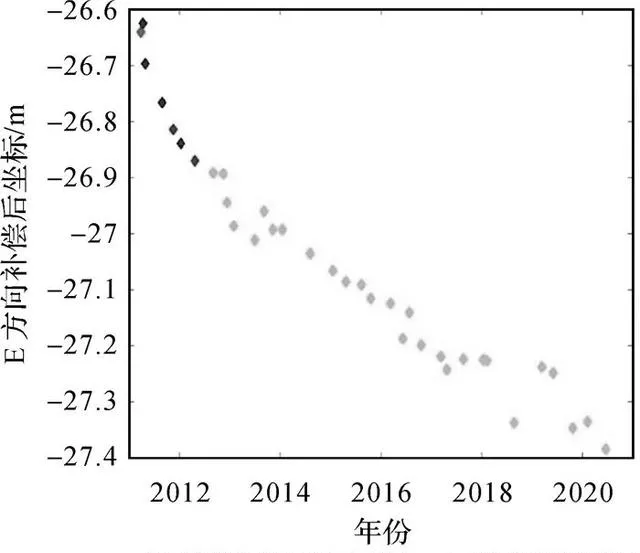
將新舊海底基準站網中心之間的差值補償到新海底基準網的中心點上(圖 5),可以看到補償之後海底基準站網的中心點時序已具備了海底地殼運動訊號提取能力。
|
|
|
圖 5 MYGI站補償中心點時間序列 Fig. 5 Time series of compensation center of MYGI station |
|
圖選項 |
在使用重心基準前,先基於初始中心點計算海底基準站網的運動速度,正常情況下的運動速度為厘米級。由表 1可知,MYGW觀測站利用初始中心點計算出來的運動速度過大,與實際不符,即基於初始中心點來研究海底運動一般是無效的。表 2給出了重心基準下求得的虛擬中心點運動速度,相對於初始中心點結果更符合地殼運動實際情況。
表 2 水平方向初始中心解重心基準解的中心速度
Tab. 2 Center velocity of the initial center solution in the horizontal direction
(m/a)
表選項
2.2 聯合估計模型解
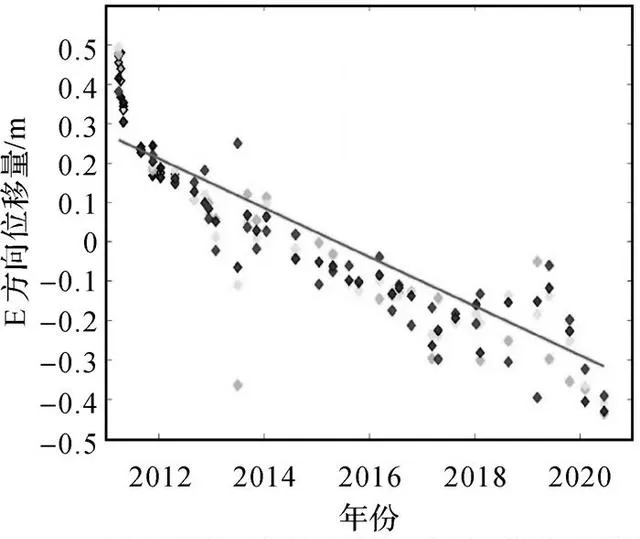
下文繼續以MYGI站為例,使用本文模型計算整體基準網速度。透過GARPOS軟體確定海底座標,圖 6中擬合直線公式為 y = vt +d x , v 代表整體海底基準網運動速度,d x 表示最小平方擬合得到的協定座標改正數的平均值,文中所有動態平差速度擬合直線均由上述方法繪制。可以看出,受觀測異常影響,絕大部份海底基準站位移時序都處於擬合直線的左下側,這是不合理的,筆者認為這主要是由觀測異常引起的。
|
|
|
圖 6 MYGI站海底基準站位移與模型擬合 Fig. 6 Model fitting of MYGI marine reference station displacement |
|
圖選項 |
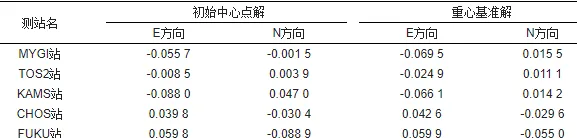
接下來比較本文聯合估計模型解中的站速度與重心基準下中心點速度的差異,比較結果見表 3,兩種結果之間的差值大多在公釐級。因此,利用聯合估計模型計算出來的速度也是有效的。
表 3 中心速度與聯合估計模型速度
Tab. 3 Center velocity and dynamic adjustment model velocity
(m/a)

表選項
由表 3可知,此時水平方向的中心速度與聯合估計模型速度之間平均相差5 mm/a左右,相差較大。下文分析速度差值較大的站點。例如,CHOS觀測站在E方向上的中心速度與聯合估計模型速度相差1.94 cm/a,誤差較大。因此,本文著重分析CHOS觀測站E方向時序。CHOS站兩種方法各自的殘留誤差分布情況如圖 7所示。由圖 7可知,2011年前幾次觀測數據的模型殘留誤差和中心殘留誤差均較大,因此,可認為2011年的觀測應視為異常觀測。考慮到2011年該區域發生了 M w 9.0級地震,該異常可能是地震的震後形變、黏彈性松弛等原因引起的。此外,在2018年,聯合估計模型的殘留誤差較大,而中心殘留誤差沒有明顯異常。可以認為聯合估計模型對觀測異常更為敏感。
|
|
|
圖 7 CHOS站模型擬合殘留誤差與中心擬合殘留誤差比較Fig. 7 Comparison of model fitting residuals and center fitting residuals at CHOS station |
|
圖選項 |
為消除異常觀測影響,本文采用IGGⅢ抗差估計,即對聯合估計模型與中心點法采用相同策略進行抗差估計,結果見表 4。
表 4 CHOS站E方向抗差前後速度
Tab. 4 Velocity before and after resistance in direction E of CHOS station
(m/a)

表選項
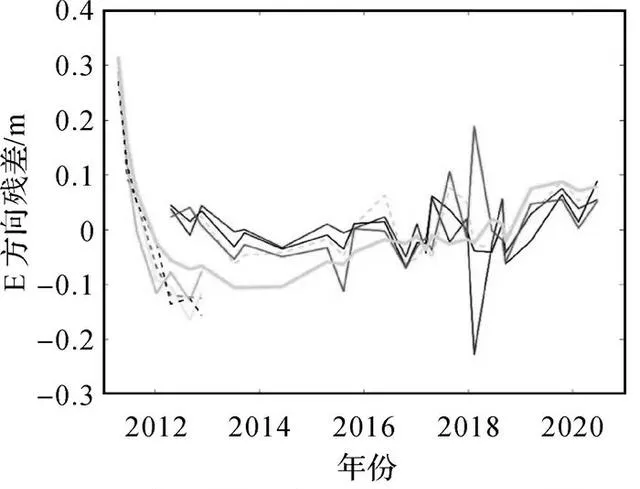
由表 4可知,抗差之後聯合估計模型速度與中心速度之間的差值已經減小到了公釐級,且本文方法抗差前後的結果變化也相對較小,說明本文方法更穩健。抗差後兩種方法的殘留誤差比較如圖 8所示,說明抗差對聯合估計模型與中心點法都有明顯的改善作用,經過抗差估計可以把絕大部份殘留誤差約束在±0.1 m以內。
|
圖 8 CHOS站抗差後模型擬合殘留誤差與中心擬合殘留誤差比較 Fig. 8 Comparison of model fitting residuals and center fitting residuals after CHOS station |
|
圖選項 |
結合圖 7、圖 8可以看出,聯合估計模型和中心點法在抗差過程中都對2011年的觀測數據進行了處理,但本文提出的聯合估計模型,可對數據處理進行精細抗差,即可只對單個有問題的海底基準站觀測數據進行刪除或降權;而中心點法中的抗差估計,則是直接對中心點進行刪除或降權,這樣處理比較粗略,其對粗差的敏感度不如聯合估計模型。具體表現為聯合估計模型在抗差過程中可檢測到多個歷元觀測異常,而中心點法則只檢測到2011年附近的觀測異常。
下文給出所有觀測站的抗差估計結果,兩種方法的比較見表 5。此時聯合估計模型的速度估計與中心點法的速度估計之間的絕對差值平均接近3.1 mm/a,有了較大改善。
表 5 抗差後水平方向兩種方法運動速度
Tab. 5 Velocity of the two methods in horizontal direction after tolerance
(m/a)
表選項
為評定中心點法與聯合估計模型的結果精度,本文計算了這兩種方法進行抗差最小平方時的標準差(表 6)。
表 6 中心點解與動態模型解的標準差
Tab. 6 Standard deviation of central point solution and dynamic model solution
表選項
由表 6可知,大多數站的聯合估計模型標準差小於中心點法標準差,但也存在反常情況。主要是由於中心點法對整組觀測進行淘汰或降權,而聯合估計模型對數據的處理要更為精細,僅對存在異常的基準站點進行異常觀測品質控制。反常發生在MYGI站的N方向,這裏中心點法的標準差要小於聯合估計模型的標準差,兩種方法的最小平方和抗差最小平方的速度擬合直線如圖 9、圖 10所示。圖 10中MYGI站在N方向上的海底基準站位移時序較為散亂,其精度相對較低也是合理的。而圖 9的中心點時序也不穩定,可能是在抗差最小平方過程中刪除較多的觀測數據,所以得到的標準差較小。
|
圖 9 MYGI站的本文方法速度擬合 Fig. 9 The proposed method for velocity fitting of MYGI station |
|
圖選項 |
|
圖 10 MYGI站的中心點法速度擬合 Fig. 10 The central point method for velocity fitting of MYGI station |
|
圖選項 |
圖 11是所有觀測站分別用兩種方法計算出來的運動趨勢示意圖,其中,深色箭頭是聯合估計模型的運動方向及速度大小,淺色箭頭是中心點法的運動方向及速度大小。可以看出,觀測站按照運動方向大致分為了兩組,分別向兩個不同的方向運動。這主要是板塊構造引起的,且研究結果和其他學者的研究結果具有很好的一致性。
|
圖 11 所有觀測站的運動趨勢 Fig. 11 Movement trends for all observatories |
|
圖選項 |
3 結論
本文構建的海底基準站網聯合估計模型,參考國際地球參考框架(ITRF)建立與維持策略,采用明確的參考歷元站座標與站速度作為未知參數,對海底基準站網時序觀測進行動態數據處理。不但可以研究形變問題,還可以獲取各站點在協定參考歷元的站座標和站速度,用於導航套用。雖然兩種方法所采用的基準和換站處理方法均不同,但計算出來的海底基準站網速度非常接近。中心點法需要在換站情況下新舊兩個海底基準站網同時觀測來進行中心點補償,而聯合估計模型則不需要新舊基準網聯合觀測,這對海底基準站網維持的觀測要求相對較低。需要指出,在不同觀測時期,海底基準站網定位可能采用不同的ITRF參考框架,在海底基準站時序觀測數據處理時需要考慮上述參考框架間的差異。
海底地震事件或觀測異常可引起海底基準站時序觀測出現異常,即出現脫離測站時序線性運動趨勢的現象。因此,若要精確估計海底基準站網的線性運動速度,需要對這些異常觀測進行品質控制。然而,由於海底基準站網一般每年只能復測2~4次,觀測樣本數量有限,為此,本文提出抗差最小平方,有利於改進中心點時序和各測站原始觀測時序的處理,且可提高測站速度估計的可靠性。
研究發現,由於日本2011年發生了 M w 9.0級大地震,期間海底基準站時序觀測存在明顯的觀測異常。因此,對於明確地震引起的震後形變,可采用ITRF 2014指數-對數模型予以處理,這也是本文的後續研究內容之一。此外,MYGW站和MYGI站相鄰,但存在明顯不同的測站運動方向,這意味著該區域存在較為復雜的地質構造運動。
作者簡介
第一作者簡介: 孫悅(1997-), 女, 碩士, 研究方向為水下導航定位套用。E-mail: [email protected]
通訊作者: 薛樹強,E-mail: [email protected]
初審:張艷玲
復審:宋啟凡
終審:金 君
資訊











