【机器人运动控制的关键硬件——执行器】
机器人的关节就是执行器。
机器人一般是由执行机构、驱动系统、控制系统和传感系统这四个部分构成的。机器人要完成工作任务就得靠执行机构这个实体,它常常是由好多连杆、关节或者其他样式的运动副组合而成的。工业机器人按照臂部运动形式能分成四种:直角坐标型的臂部可以沿着三个直角坐标移动;圆柱坐标型的臂部能够进行升降、回转和伸缩这些动作;球坐标型的臂部会回转、俯仰和伸缩;关节型的臂部有好几个转动关节。这些运动都得靠执行器来完成。
执行器按运动方式可分两类,即旋转执行器和线性执行器。1. 旋转执行器能把某物旋转一定角度,这个角度可以是有限的,也可以是无限的。电动机就是旋转执行器的一个典型例子,它是一种能把电信号转变成轴的旋转运动的执行器。基本电机通上电流时就会旋转。要是把电机直接连到负载上,就成了直接驱动的旋转执行器。很多旋转执行器会和起机械杠杆作用的机构组合(这是优点),这样能降低转速并增加扭矩,只要最终结果是旋转,那这个组合部件的输出仍然算是旋转执行器。2. 旋转执行器还能连接到一种机构上,这种机构能把旋转运动变成来回运动,这种机构就叫线性执行器。线性执行器主要是让物体沿直线移动,一般是来回移动。这些机构包括滚珠/滚柱丝杠、皮带和滑轮、齿条和小齿轮。滚珠丝杠和滚柱丝杠常用来把旋转运动转化成精确的直线运动,像在加工中心就会用到。齿条和小齿轮通常能增加扭矩并降低旋转运动的速度,它们也可以和把旋转运动转变成线性运动的机构一起使用。
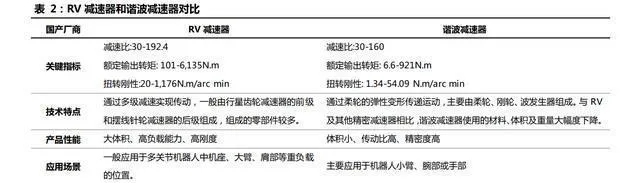
旋转执行器主要有RV减速器和谐波减速器这两种:1)RV减速器:RV一般采用摆线针轮,在转矩大的机器人关节上使用,主要用在负载为20公斤到几百公斤的机器人上,一二三轴都用RV。RV使用较长时间后精度的保持性比谐波要好。因为RV的零部件更复杂,承载强度更大,制造起来也比谐波更难,所以生产线的资本投入更高。2)谐波减速器:谐波以前主要是渐开线齿形,现在有些厂家用双圆弧齿形了。谐波能承受的转矩小,一般用在20公斤以下的机械臂上。谐波里有个关键的齿轮是柔性的,它要反复高速变形,所以比较脆弱,承载能力和使用寿命都不如RV。
丝杠这种传动副零件能把旋转运动转变为直线运动。按摩擦特性来分的话,有滑动丝杠、滚动丝杠和静压丝杠。在滚动丝杠里,依据载荷传递元件的不同,又能分成滚珠丝杠和行星滚柱丝杠:1)滚珠丝杠:在传动机械里是用得最多、精度最高的传动装置。它有摩擦阻力小、传动效率高、定位精度高、刚性强、能微进给、可高速进给、无侧隙、使用寿命长等特点。2)滚柱丝杠:跟滚珠丝杠比起来,滚柱丝杠有着高负载、高刚度和长寿命的长处。行星滚柱丝杠成本高,主要用在高端或者有特殊需求的地方,应用范围不大,大多是用来替代液压执行器的。3)梯形丝杠:它和滚珠丝杠的运动原理是一样的,区别在于梯形丝杠里没有滚珠,螺母和丝杠轴之间靠机械接触产生滑动来运动,这是滑动摩擦,所以梯形丝杠也被叫做滑动丝杠。滚珠丝杠是滚动摩擦,梯形丝杠是滑动摩擦,滚动摩擦的摩擦系数比滑动摩擦系数低得多,大部分滚珠丝杠的传动效率能达到90%,有的能超过95%,而大部分梯形丝杠的传动效率在70%以下。
机器人的负荷和工作精度是由执行器决定的。
机器人能胜任什么工作、最高操作性能怎样等情况,这些都反映在机器人的技术参数里。主要有这么几个方面:自由度、额定负载、工作空间、工作精度。另外还有工作速度、控制方式、驱动方式、安装方式、动力源容量、本体质量、环境参数这些参数。
1)自由度:工业机器人的自由度按其用途来设计。机器人的自由度体现其动作的灵活性,自由度越多,就越接近人手的动作机能,通用性也越好,能用直线移动、摆动或者旋转动作的数量来表示。自由度越多,结构越复杂,对机器人整体的要求就越高。工业机器人将机械臂上的每个关节视为一个独立的伺服机构,就是说每个轴对应一个伺服器,各个伺服器经总线控制,由控制器统一管控协调工作。
2)额定负载,也叫有效负荷。在正常作业的情况下,工业机器人处于规定性能范围时,手腕末端能够承受的最大载荷就是额定负载。工业机器人负载的范围比较大,一般在0.5到2300kg之间。要是负载比较大的话,提高电机功率是不划算的。可以在合适的速度范围内,利用减速器来提高输出扭矩。伺服电机在低频转速的时候,容易发热和产生低频振动,这对长时间工作的工业机器人来说,不利于保证它精确可靠地运行。精密减速器能让伺服电机在合适的速度下运行,还能精确地把转速降低到工业机器人各个部位所需要的速度,在提高机械刚性的同时,输出更大的力矩。
3)工作精度方面:机器人的重复定位精度由关节减速机和传动装置的精度决定,而绝对精度是机器人控制算法、编码器精度、减速和传动装置精度等多方面综合的结果。通常,机器人的重复精度比绝对精度要高。想提高机器人的绝对精度就得进行高精度标定。标定分三级:一级是驱动器和关节传感器的标定,就是明确关节位移传感器发出的信号和实际关节位移之间的关系;二级是在一级的基础上加上机器人几何参数的标定,这是针对各连杆运动变量误差和连杆结构参数误差造成的位姿误差;三级是非几何标定,针对的是关节柔度、摩擦、间隙和连杆柔度等因素带来的误差。在标定的时候,测量是在参数辨识和补偿之前的重要步骤,包含关节位移测量和机器位姿测量。位姿测量方法有接触式和非接触式,接触式测量对机器人位姿的限制比较大;非接触式测量里,三坐标测量机只能测小型机器人,激光跟踪仪对环境比较敏感,操作起来复杂,测量花费的时间也长。
4)工作空间,也叫工作范围或者工作行程。工业机器人工作的时候,手腕参考中心(就是手腕旋转中心)能到达的空间区域,这就是工作空间,不过手部自身能到达的区域不包含在内。工作空间常用图形来表示,P点是手腕参考中心。机器人工作能力的大小,能从工作空间的形状和大小看出来。工作空间和机器人各连杆的尺寸有关,也和机器人的总体结构有关。工业机器人工作的时候,可能会有手部到不了的作业死区,这样就没法完成规定的任务。末端执行器的形状和尺寸各种各样,为了能如实反映机器人的特征参数,工作范围一般说的是不安装末端执行器时能到达的区域。
总的来说,执行器在机器人里属于关键零部件,它对机器人的负荷和精度影响很大。减速器呢,是一种能减速传动的装置,它可以把转速降下来,让扭矩升高,这样就能传递比较大的负荷,把伺服电机输出扭矩小这个缺陷给克服掉。
Tesla Optimus的关节执行器结构很紧凑,能承受高负载,而且能耗低。
看特斯拉的发布会,我们预计特斯拉Optimus身体关节有28个,这其中包含三种旋转执行器(14个)和三种线性执行器(14个)。
特斯拉Optimus旋转执行器方案的猜测:永磁无刷电机、谐波减速器、抱闸、双编码器、力矩传感器和轴承。谐波传感器有这些优点:体积小、速比大,能达到160:1,扭矩密度较高。它轴向的尺寸小,能让执行器关节轴向比较紧凑。在机器人行业里,多数关节都没集成扭矩传感器,这是考虑到成本、集成难度和刚度损失等因素。集成扭矩传感器的好处是关节更安全,力控算法也更简单。
特斯拉Optimus直线执行器方案推测:永磁无刷电机+行星滚柱丝杠+位置编码器+力传感器+轴承。线性执行器用于关节有这些好处:1. 空间利用效率高。传统旋转执行器是分布在关节周围的,线性执行器却能纵向放置,这样就能最大程度地利用腿部内部空间,能放更大更长的电机,从而产生更大的推动力。2. 有自锁能力。线性执行器的螺杆传动机构要是设计得合理,就会有自锁能力。就是说下半身不动的时候,能自动把姿态锁定,不消耗能量,就像形成了一个功耗低又稳定的底部支架。3. 能耗低、负载高。上肢肘关节屈伸用线性执行器的道理和腿部是一样的,都是能耗低、推力大。前臂的两个线性执行器组成并联关节,主要是为了减小腕关节的尺寸。腕关节细有两个优点:一是抓东西的时候,能减少关节和工件之间的相互影响,让抓握路径更灵活;二是减少前臂对视觉构建以及视觉位置反馈的干扰,提高控制的精准度。用行星滚柱丝杠能输出很高的精度和承载能力。行星丝杠的节距能做得很小,所以用小扭矩就能产生很大的推力,电机的功率和体积就可以小一点。电机的转子是集成在螺母上的,整体结构更紧凑。2.2千克的执行器能输出8000牛的力,推力密度很高。
【人形机器人旋转执行器:需求弹性及供给能力分析】
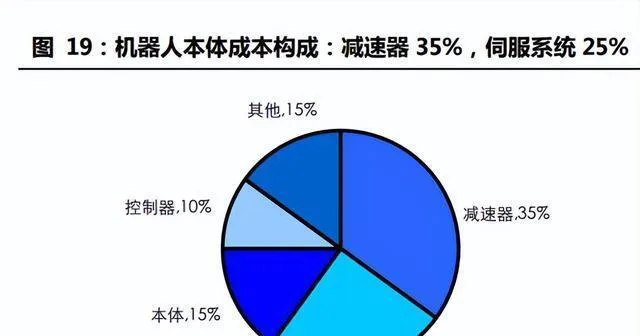
在工业机器人里,减速器的成本占了35%,这是成本构成里占比最高的,价值量也是最高的。预计在人形机器人里,它的价值量占比也会比较高。工业机器人是这么控制的:控制器给伺服驱动发指令,伺服驱动就让伺服电机转起来,然后通过减速机来执行动作。在工业机器人上游的三个大部件里,减速器的成本占比最高,达到35%,伺服系统(伺服电机加伺服驱动器)占25%,控制器占10%。
人形机器人产业化时,对谐波减速器需求有多敏感?分析一下。
2017 - 2021年,精密减速器(谐波加上RV)的销量从49万台涨到了101万台,复合增长率是19.8%。工业机器人用的精密减速器销量呢,从41万台增长到84万台,复合增长率为19.5%,2021年的时候这个占比达到了82%。2018 - 2021年,精密减速器的市场规模从57.7亿元增加到59.5亿元,复合增速是1%,这和国产替代速度变快、均价下降是有关系的。人形机器人运动执行部件也许会把谐波减速器当作主要执行部件之一。我们假定人形机器人不同的年销售规模,来对谐波减速器的需求弹性做敏感性分析。核心的假设如下:1. 这次测算假定人形机器人的年销量在10到100万台之间;2. 每台人形机器人配14个谐波减速器;3. 马斯克在特斯拉开放日说过,特斯拉人形机器人最终售价会降到2万美金以下,从目前产业链的成本来看,还有很大的降本空间。我们暂时不能对产业链各个环节成本下降的幅度和速度做假设,我们觉得,技术成熟以及产业链成本下降是产业化的前提,规模化是技术成熟和成本下降后的必然结果。
就现在知道的信息来说,人形机器人用RV减速器的可能性比较小。所以呢,我们就不对RV减速器做敏感性分析了。估计RV减速器以后主要还是用在工业机器人上。
谐波减速器的供给格局:国产化速度加快。
哈默纳科是世界上最大的谐波减速器生产商,全球市场占比超80%。谐波传动最早用在美国航天运动控制方面,谷川齿轮把它引入日本还搞了量产,1970年哈默纳科就成立了。这五十多年来,它不断进行技术更新,海外业务也不断扩张,就这么垄断了全球谐波减速机市场,产品种类也越来越多,像精密减速机(有谐波减速器、减速器组件和行星减速器),还有机电一体化产品(像执行器、控制器)。2021年哈默纳科营业收入是570亿日元,2000年到2022年的年均复合增速是8.3%,这个速度和全球工业机器人行业的增速差不多。它的毛利率大概稳定在40%左右,净利率也保持在20%以上。
国内谐波减速器发展得很快,绿的谐波最先打破垄断局面,同川、大族也赶紧跟上,双环、中大力德、国茂股份也开始涉足这个领域了。我国的谐波减速器厂商起步的时间比较晚,不过因为我国工业自动化对工业机器人的需求很旺盛,国产谐波减速器就得以快速发展起来,这些年国产替代的速度也加快了。2021年的时候,哈默纳科在中国谐波减速器市场占的份额是38%,跟2018年的52%相比,明显下降了。以绿的谐波为代表的国产谐波减速器,市场份额提升得很明显。随着这个行业蓬勃发展,国内新加入的企业变多了,日本新宝、台湾来福的份额比较稳定,同川、大族这些企业也占了一定的市场份额,中大力德、国茂股份、光洋股份也参与到竞争当中,国内的产能建设速度也加快了。国产谐波减速器用价格换数量,高端产品技术突破是关键。谐波减速器结构不复杂,要是对寿命要求不高的话,进入这个领域的门槛就比较低。疫情期间,外资厂商供货周期长,国产品牌抓住这个市场机会快速增加出货量,不过产品大多集中在中低端市场。国内企业凭借本土优势能提供价格低的谐波减速器,2021年均价大概2000元,哈默那科的谐波减速器进口单价大多在8000元及以上,国内企业靠着一定的价格优势在销量上表现很好。根据MIR的数据,2021年绿的谐波、来福减速器的销量分别是17.8万、9.5万台,远远超过哈默纳科的3.5万台。

RV减速器的供给情况是:国产品牌正在努力突围。
纳博特斯克是全球最大的RV减速器制造商,在全球市场占的份额超60%。它的前身是日本帝人制机和纳博克株式会社,2003年这两家公司合并,成了控股公司纳博特斯克的全资子公司。1980年的时候,日本帝人精机把RV减速器用在了机器人行业,这就解决了工业机器人容易被冲击损坏、手臂振动之类的问题。1986年开始,RV减速器就在工业机器人领域大规模应用了,正好赶上日本「机器换人」的潮流,这就奠定了它在行业里领先的地位。纳博特斯克的营收一年比一年稳健增长,2003年到2022年期间,年均复合增速是4.9%。营收从2003年的1250亿日元涨到了2022年的3080亿日元,2022年的毛利率是5.9%,净利率是24.8%。
2021年的时候,纳博特斯克在中国占的份额是52%,国产品牌份额超30%。像中大力德、秦川机床、南通振康、珠海飞马、智同科技这些企业,规模都比较靠前。南通振康在2010年就做出了第一台RV减速器,双环传动和中大力德呢,大概在2013年左右开始搞工业机器人精密减速器的研发。经过了十多年的技术积攒,还有产品种类的拓展,双环传动的市场份额涨得挺明显的,从2018年的7%涨到了2021年的15%。国内规模比较靠前的企业有中大力德、秦川机床、南通振康、珠海飞马、智同科技这些。
机器人的轴承供给格局:主要靠进口。
工业机器人专用的轴承包括等截面薄壁轴承、薄壁交叉圆柱滚子轴承、RV减速机轴承还有谐波减速器用的柔性轴承等,这些轴承大多遵循非标准、多滚动体之类的设计原则。
国内工业机器人用的轴承大多得靠进口。国内有一小部分厂家也生产工业机器人配套轴承,可产量不大,品种和规格也少,零部件通用性差,供货要花很长时间,成本还高,质量也不稳定。最近这几年,我国轴承厂商的制造能力提高了不少。做机器人配套轴承研发的主要厂商有:人本轴承、国机精工、洛阳LYC轴承公司、北京谐波技术研究所、洛阳汇工轴、五洲新春。
【线性执行器:需求弹性及供给能力分析】
人形机器人产业化时对线性执行器的需求敏感性分析
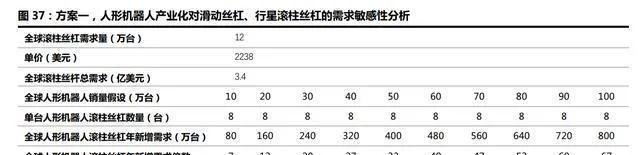
2022年的时候,全球滚珠丝杠市场规模达到了20.4亿美元。要是不把人形机器人产业化考虑进去的话,这个行业应该会保持比较低速的稳定增长。预计到2029年,市场规模能达到30.9亿美元,2023年到2029年这期间的复合增速是6.1%。亚太地区是最大的消费市场,占了58%的市场份额,欧洲排在第二位。咱们来假设人形机器人不同的年销售规模,对滚珠丝杠、滚柱丝杠、滑动丝杠的需求弹性做个敏感性分析。核心的假设如下:第一,这次测算假设人形机器人的年销量是在10万到100万台之间;第二,每台人形机器人配备14个谐波减速器;第三,特斯拉到现在还没公布它的线性执行器具体方案,我们推测可能存在两种方案,方案一是4个滑动的加上8个行星滚柱丝杠,方案二是14个滚珠丝杠;第四,马斯克在特斯拉的开放日提到,特斯拉人形机器人最终的售价会降到2万美金以下,从目前产业链的成本来看,有很大的降价空间。我们暂时没办法对产业链各个环节成本下降的幅度和速度进行假设,我们觉得,技术成熟以及成本下降是实现产业化的前提,而规模化是技术成熟和成本下降之后必然会出现的情况。
滚珠丝杠的供给格局是这样的:高端市场由外资主导,中低端市场已经实现国产替代了。
滚珠丝杠的主要供应商大多在日、德、台这几个地方,其中NSK在全球滚珠丝杠市场占的份额是最大的。全球市场被日本的NSK、THK等企业把控着,CR5大概是46%,日本和欧洲的企业加起来在全球占了差不多70%的市场份额。在国内市场,上银和银泰的占有率快到50%了,NSK、THK的市场占有率大概是15%,国内企业的占有率约为25%。国产企业开始得晚,产业规模不大,产品种类少,生产效率也不高,还没有做出在国际上有影响力的品牌,主要的厂商有南京工艺、博特精工、合肥赛里斯(江苏雷利)、鼎智科技(江苏雷利)、华欧精密等。国产滚珠丝杠在中低端的应用基本上已经能替代国外产品了,产品种类和技术指标跟外商比起来差得不多。在高端产品方面,滚珠丝杠在精度、最高速度、噪音、温升等的控制上以及精度的保持性还需要提高,在高端细分市场,国产滚珠丝杠副已经开始被机床企业批量使用了,像秦川机床、海迈克精密,贝斯特和恒力液压也在安排相关产品的布局。
滚柱丝杆的供给格局是,国内才刚刚起步。
70年代的时候,武器装备技术以及石油、化工、数控机床这些方面,对大推力、高精度、高效率、长寿命的要求越来越高,行星滚柱丝杠就开始被大量使用了。1970年开始,瑞士的ROLLVIS公司(后来被GSA收购了)就专门搞行星滚柱丝杆产品的制造和研究。美国的EXLAR公司把行星滚柱丝杠当作六自由度并联机构的传动装置,做出了一种新的电推杆,行星丝杠的商业应用就加快了速度,现在主要用在航空航天、武器装备这些军事方面,还有数控机床、工程机械这些民用方面。在行星滚柱丝杠的市场上,全球主要的制造业国家和瑞士比起来差距很大。国外有能力生产行星滚柱丝杠的企业主要是GSA、SKF、EWELLIX、MOOG这些。GSA公司的行星滚柱产品系列是最全的,规模也是最大的,在装配、加工工艺、材料以及热处理工艺上有很多的经验积累,不管是产品覆盖的规格、生产规模,还是产品生产经验的积累,对其他地区都有很大的优势。
国内行星滚柱丝杠才刚刚起步,只有博特精工、常州思科瑞、南京工艺等寥寥几家企业有小批量生产的能力。2010年的时候,博特精工、南京工艺、常州思科瑞这些国内厂商开始搞行星丝杠的研发,到现在已经能小批量生产了。不过国产的行星丝杠在承载能力和产品尺寸覆盖范围方面还有不足,产业化和规模化还处在早期水平。
【技术壁垒:设计、材料、工艺、加工】
减速器、丝杠、轴承这类精密产品及其零部件,在设计、材料、工艺和加工精度方面存在技术壁垒,这些最终会在产品性能上体现出来,像产品的精度保持度、寿命、故障率等。国产减速器和海外产品在性能上的差距,就表现在寿命和精度保持性上。在效率、减速比、传动精度、扭矩刚度这些关键指标参数方面,国产减速器差不多已经达到国际领先产品的水平了,不过在疲劳寿命、故障率、批量产品的稳定性上还存在差距。从官网数据来看,纳博特斯克销量最高的RV - C和RV - E系列,额定输出转矩和减速比都更高,寿命能达到6000小时以上。和国外产品比起来,国产减速器用久了还是会有磨损、漏油、精度下降的情况;国产谐波减速器在高速运行时容易断裂,在产品稳定性和使用寿命上还得提高。
减速器的性能和啮合原理、齿形设计、结构优化有关,也和原材料、加工、热处理工艺这些因素有关。在效率、减速比、传动精度、扭矩刚度这些关键指标参数上,国产减速器差不多达到国际领先产品的水平了,不过在疲劳寿命、故障率、批量产品的稳定性方面还有差距,这也和啮合原理、齿形设计、结构优化有关,还和原材料、加工、热处理工艺等因素有关。这一章咱们主要拿谐波减速器举个例子,讲讲高精度核心部件的技术壁垒。
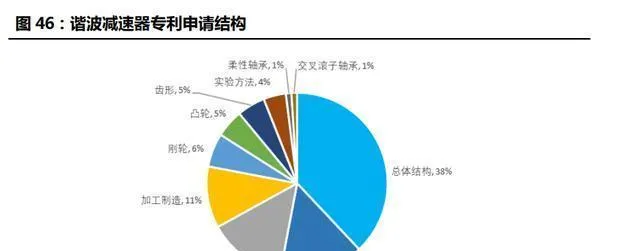
谐波传动技术包含10个分支,分别是总体结构、柔轮、刚轮、凸轮、柔性轴承、交叉滚子轴承、齿形、波发生器、加工制造以及试验方法。从专利申请的数量上看,总体结构、波发生器、柔轮和加工制造是谐波减速器技术研发的重点。
1)波发生器(柔性轴承):减速机厂家通常从轴承厂家购入标准柔性轴承,质检合格后,将其压入自己设计加工的凸轮,这样就制成了波发生器。凸轮:用厂家标准品的话,货期和价格都比较理想,不过,因为电机的轴径、长度、安装方式不一样,很多厂家会对凸轮提出定制要求。进口品牌的减速机大多会深度定制,而现在国产品牌规模小,很难搞定制。柔性轴承关键是材料和热处理的问题,得承受球体压力,还得承受高速运动产生的变形。太软的话,沟道容易坏;太硬的话,轴承容易断。凸轮主要是加工方面的问题,其实目前国内的加工水平完全能达到要求,就是后期批量生产时,怎样选择加工工艺才能性价比最高。
2)刚轮:其主要生产过程有下料、热处理、外形加工、齿加工等。打样时通常会用40Cr棒料来加工,量产的时候以进口球墨铸铁为主,主流厂商会包炉。批量生产大多采用滚齿,成型后,会对齿做加强处理,主要是用喷砂或者渗氮工艺,为的是增加硬度和耐磨性。
3)柔轮常用40CrNiMoA这种材料,不过也会有一些微量添加的情况。厂家一般是拿棒料,下好料后先锻造再加工。和刚轮比起来,柔轮加工有三个最大的难点:其一,柔轮精加工的时候壁特别薄,得防止变形和抖动,这就需要专门的治具把内壁撑住;其二,得想办法控制窜刀量,保证柔性轴承压进去之后刚好能把齿撑起来;其三就是齿的修型问题。天下的齿型基本出自HD,只有极少数厂家有能力设计新齿型。
4)交叉滚子轴承:谐波减速器专用的十字交叉轴承,刚度很高,旋转精度也高,复合承载能力强,而且外形紧凑。精密轴承是制造业里的关键零部件,机器人配套轴承是轴承应用的一个细分领域。机器人用的精密轴承有这些:谐波减速器专用十字交叉轴承、柔性轴承、RV减速器轴承、交叉滚子轴承、等截面薄壁轴承等等。
5)油封和润滑这块,这都是很成熟的零部件了。不过大厂家往往会定制油封来提高性能。谐波的润滑方式有油润滑和脂润滑这两种。油润滑呢,流动性不错,所以润滑效果好,热传导也好,能提高转速,但是对密封的要求特别高。现在只有HD采用油润滑,所以也只有HD能做高速谐波。除了HD,别的厂家一般都用脂润滑。
设计方面,齿形设计与传动结构设计是关键所在。
谐波方面:绿的、来福在齿形设计和传动结构上,避开了哈默纳科的专利。哈默纳科是谐波领域的龙头企业,它先发制人地对齿形设计和传动结构申请了专利。国产的绿的谐波有P齿形,来福谐波有δ齿形,这率先打破了垄断,差不多能满足谐波减速器的性能要求。不过新进入这个领域的厂商要设计出性能优良的齿形是很难的,因为得避开专利限制。RV方面:摆线齿轮修形的理论不完善。国内企业对摆线齿轮修形原理大多是靠经验数据,没有足够完整的理论依据。这就使得齿型修形得不断尝试改进,增加了研发时间,而且改进效果还不明显。另外,RV减速器的结构复杂,零部件在设计上的配合以及细节参数的优化,这些都是影响减速器精度的重要因素。
材料和零部件长期靠进口。
谐波减速器的柔轮材料一直以来都得靠进口。不管是国内还是国外,谐波减速器的柔轮材料大多是40Cr合金钢,这里面40CrMoNiA和40CrA是最常用的。要是晶粒和铁氧体相不合理的话,就会出现局部微裂纹,尺寸精度也会有变化,所以对材料纯度要求很高。同样的原材料,国外提纯技术好,杂质少,这样一来,国产谐波减速器的材料就只能长期依赖进口了。

RV减速器这块儿,国产轴承在精度方面还有不小的差距呢。RV减速器的原材料有齿轮钢(像20CrMnTi、20CrMo、20MnCr5之类的),还有轴承合金等。国内齿轮钢的生产水平已经接近国外先进水平了,不过和日本、德国、美国生产的齿轮钢比起来还是有点差距的,比如淬透性宽、纯度低这些问题。在外购零部件这块,有些厂商会选择购买轴承、密封圈、滚针、挡圈等零部件。轴承对产品精度影响很大,国产轴承在精度上还是差得比较多的。
工艺得靠经验慢慢积累。
热处理工艺对提高减速器疲劳寿命和精度稳定性特别关键。根据目的的差异,热处理工艺通常分为预备热处理与最终热处理。预备热处理是用来改善材料加工性能、消除内应力的,像退火、正火、时效、调制等就是主要的预备热处理工艺;最终热处理呢,目的是改善材料的硬度、耐磨性等,进而提高减速器疲劳寿命和稳定性,淬火、渗碳淬火、渗氮处理等属于主要的最终热处理工艺。谐波方面:柔轮失效是谐波减速器的主要失效形式中的一种,这对谐波减速器的使用寿命有很大限制。柔轮的壁比较薄,而且要承受波发生器和外部载荷这两方面的作用,所以良好的热处理工艺是确保材料结构组织一致的必备条件。国产厂商在柔轮的热处理工艺、慢走丝、连续切割等加工工艺上存在差距,而这些正是决定减速器精度和寿命的关键所在。
RV呢,它的设计比较复杂。像摆线轮、偏心轴、针齿壳这些核心部件,加工起来都特别难。最核心的难点就在于各种工艺得紧密配合,像加工精度啊、零件对称性、成组技术、装配精度这些方面。热处理技术是国内厂商的一个大问题,技术要是不行的话,产品就会变形,硬度也不够。工艺上的差距呢,就造成了产品在精度、损耗速度和寿命方面的差距。这也对操作人员的技术要求很高,操作人员得能根据各种条件的变化及时调整,这样才能保证成品率。
滚珠丝杠主要有两种制造工艺:轧制和磨制。轧制是批量制造,精度低些,不过生产效率高,设备门槛比磨制高。我国磨制丝杠发展得早,非标要求高,规格产品挺齐全的。从开始只能满足部分非标需求,到现在差不多能满足所有使用场合了。像低噪音、低摩擦、重载低速、高速,还有注塑机用的重载专用丝杠这些情况,基本都国产化了。轧制丝杠起步晚,近年才形成完整的体系产业链,已经能把低端的中国台湾品牌替换掉了。而且像小导程、特殊材料、机电集成化丝杠这些细分产品,也基本形成了体系产业链。
热处理、磨齿机、三坐标等检测设备依赖进口,这些都是关键设备。
磨齿机、高精度三坐标检测设备还有齿轮检测设备,这些都是提高减速器齿轮精度的重要设备。在谐波减速器的加工时,得用到齿轮加工机床、三坐标测量机、加工中心、磨床、车床、热处理设备等这些设备。RV减速器加工得用齿轮加工机床、加工中心、车床、磨床、硬拉床、三坐标测量机、热处理设备等设备。在实际情况里,RV减速器得反复精确定位,所以对加工设备的精度要求很高,不然产品就会磨损。a. 加工设备:像偏心轴、摆线轮、针齿壳、行星架等这样的核心零部件,它们最后的精加工设备得靠进口。咱们对这些核心关键设备就只是会用,要是工艺有新要求或者要不断优化的时候,国内的厂商就不能很快做出反应。b. 专用工装:设备供应商一般不会给一整套高精度的工装设备,所以自己设计制作工装是加工出高精度零部件的又一个重要因素。c. 检测设备:高精度三坐标检测设备、齿轮检测设备,还有相关的材料检测设备,这些能保证齿轮质量和尺寸准确无误,是高精度RV减速器的关键。
热处理的设备。
国内中高端的热处理设备得靠进口。减速器热处理产线一般是定制的,有些企业把这部分业务外包加工。国内热处理行业发展程度比较低,中高档热处理设备一直以来都依赖进口。2017 - 2021年期间,中国热处理设备制造行业的进口额在2000万美元上下浮动。2019 - 2021年,这个行业的进口金额逐年增多,2021年进口金额达到了23391.03万美元,跟上年比增长了16.10%。2017 - 2021年进口数量每年的增长率都在80%以上,2021年达到了51404台,同比增长83.36%。

国产热处理设备在设备稳定性、信息化程度和产线集成能力等方面还有差距,不过部分厂家的部分设备技术水平已快赶上国外中高端产品水平了。海外在热处理设备及服务方面领先的公司有爱协林、应达、易普森、易孚迪、日本高周波、德国ALD等。国内感应热处理装备制造商里综合实力比较强的公司有上海恒精机电设备有限公司、天津天丰淬火设备有限公司、洛阳升华感应加热股份有限公司、十堰恒进科技有限公司、十堰天舒机电科技有限公司。在这些公司里,上海恒精机电设备有限公司、洛阳升华股份有限公司、十堰恒进科技有限公司的一些设备技术水平已接近国外中高端产品水平,正慢慢取代进口产品。
磨床精度很高。
高精度磨床一直都靠进口,秦川机床、重庆机床、南二齿在磨齿机国产替代方面是龙头。按齿轮加工工艺来看,齿轮机床包含滚齿机、插齿机、铣齿机、剃齿机、珩齿机、磨齿机等系列。齿轮加工的工序很复杂,不同工序对精度的要求不一样。通常,决定减速器齿轮精度的是热处理后的精加工环节,这个环节主要靠磨齿机(没经过磨齿的齿轮,精度最高只能到6级,而磨齿机加工过的齿轮,精度最高能达到2级),这种设备长期靠进口,像莱斯豪尔、格里森、卡帕耐尔斯、日本电产等公司的产品。秦川机床是国内磨齿机的龙头企业,有希望实现高端设备的国产化替代,它的YKS7225双工位高效磨齿机精度能达到国标GB/T10095 - 2008中的4级;重庆机床、南二齿也有磨齿机生产能力,重庆机床的YS7232/YS7232G高精密数控蜗杆砂轮磨齿机批量加工精度能达到4 - 5级。
三坐标高精度的、齿轮检测设备高精度的。
高精度三坐标的国内产品和国外产品有差距,主要在三个方面:1)精度等级方面,进口的精密计量型测量机检测精度能在0.5微米以内,国产设备最多就到0.8微米,而且测量行程没有进口的长。2)进口机型在结构设计和材料方面是多方向发展的,国内好多厂商的产品呢,结构和材料都差不多,没什么创新能力。3)进口机型的控制系统、测头和测量软件等,一般都有自主知识产权,核心技术基本都掌握了;但大多数国产机型除了机械本体,关键部分用的是国外品牌,自主研发能力不强,缺核心技术。国际上比较有名的测量机生产厂家有瑞典海克斯康、德国蔡司、德国温泽和日本三丰等,计量型测量机市场主要被蔡司、海克斯康垄断。我国三坐标测量机的主要生产厂商有303所、西安爱德华、青岛雷顿、集萃华科等。
产品的SKU丰富度和客户粘性
国内的减速器厂商,产品矩阵的丰富度(SKU)比不上海外厂商,这得靠时间和技术慢慢积累才行。哈默纳科、纳博都成立了半个多世纪了,在减速器这类产品上底蕴深厚。哈默纳科的谐波减速器产品有15个系列,总共49款,像空心轴减速机、微型减速机等多种样式都包括在内;绿的谐波呢,只有6个系列共19款产品。纳博特斯克有3个系列共25款RV加速器,双环传动下面是2个系列共12款RV减速器。不管是RV还是谐波减速器,国内厂商在产品种类的丰富程度上都有差距,而且这不是短期内就能补上的,得在技术、专利方面不断积累,也需要时间。
(这篇文章仅供参考,不表示我们有任何投资方面的建议。要是想使用相关信息的话,请查看报告原文。)
精选报告来源:【未来智库】。「链接」











