广泛在工业自动化领域,能够适应各种复杂的作业环境。在桁架机器人应用中,有需要多个机械臂在桁架机器人上协同工作的情况,这是一个复杂且精细的过程,这涉及到多个层面的技术和策略。本文特鲁门小编为大家介绍一下。
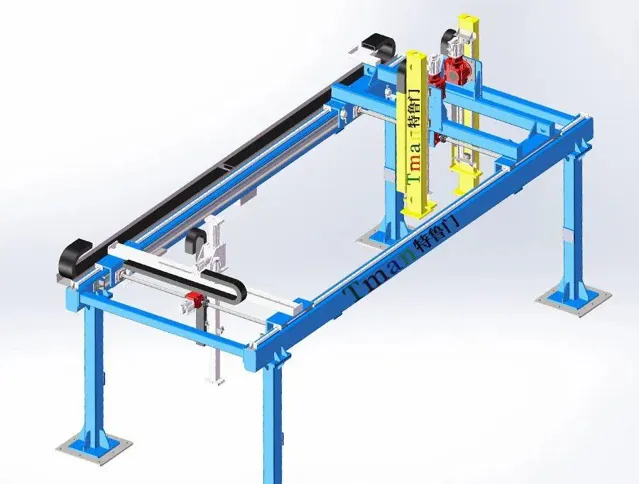
桁架机器人
首先,机械臂之间的协作需要高度精确同步,以防止出现碰撞或其他问题。为此,机械臂必须能够实时感知彼此的位置和状态。这通常通过先进的传感器系统实现,如力/力矩传感器或视觉系统。这些传感器能够实时测量和传输每个机械臂的实时力信息和状态信息,使得每个机械臂都能感知到其他机械臂的信息,从而进行精确的协同作业。
其次,良好的通信和信息共享机制是实现多机械臂协同工作的关键。通过网络或其他通信方式,机械臂可以实时交换数据、指令和状态信息,从而实现协同控制和作业。
桁架机器人
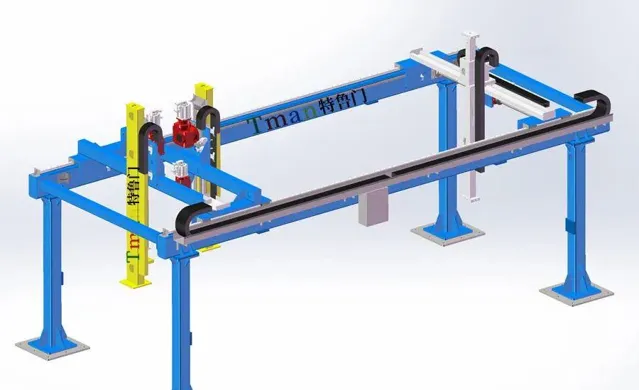
桁架机器人
再者,分布式控制技术在此场景中非常有用。通过将任务分解为多个子任务,每个机械臂负责完成其中一个子任务,可以确保在不干扰其他机械臂的情况下完成自己的任务。这种分布式控制方法可以提高工作效率,并减少可能的冲突。
此外,桁架机器人本身的特性也促进了多机械臂的协同工作。桁架机器人具有自动控制的、可重复编程、多功能、多自由度、运动自由度间成空间直角关系等特点,这使得它能够灵活地搬运物体、操作工具,以完成各种作业。这些特性使得桁架机器人成为多机械臂协同工作的理想平台。

桁架机器人

桁架机器人
#深度好文计划#因此,多个机械臂在桁架机器人上协同工作需要多种技术手段,以实现高效、安全、精确的协同作业。这样的协同工作模式在制造业、物流、医疗等领域具有广泛的应用前景。











