無論是人形機器人還是復合機器人,真正要去替代人,應該先從人類最不願意進行的工作開始。而這些任務,往往復雜度更高,對機器人能力要求更多。例如災難救援、在軌維護、空間裝配任務等極端條件下,不僅需要機器人能夠處理復雜的障礙和重物,還需要其能夠像人類一樣使用雙臂協同協調進行混合任務作業,這對於單臂機器人來說難以勝任。因此,研究如何實作雙臂機器人系統的協調控制,以適應不同約束條件下的任務需求,具有重要的理論和實際意義。
近日,International Journal of Robust and Nonlinear Control上一篇名為【Model-free event-triggered distributed coordination control for dual-arm reconfigurable manipulators with unknown object constraints】的論文吸引了國際上不少人的目光。該研究提出了一種面向未知工具約束的雙臂可重構機器人無模型事件觸發分布式協調控制方法,並采用中科深谷的即時仿真控制系統以及三軸機械臂進行了實際協作抓取可行性驗證。實驗結果最終實作了針對具有未知工具約束的雙臂可重構機器人系統,借助這種新方法,未來有望套用於人形機器人以及雙臂協作機器人等模態的異構任務處理。

▍真實產品支持研究高效驗證
雙臂相對於單臂無疑能發揮更大的作用,人們常見的人形機器人其實上半身是一個復雜的雙臂系統,大多由多個機械臂連桿及關節串聯組成,各部件之間存在復雜的力學耦合關系,從任務層的角度而言,雙臂機器人需要在工業生產中搬運大型物體的操作任務,執行醫療中的手術等任務,在裝配線上,兩個機器人需要協調工作來完成零部件的安裝。在實際套用中,抓取工具的多樣性和可重構機器人模型的不確定性是完成在無人直接操作的復雜環境中雙臂協調搬運任務的主要難點。
這種復雜性需要透過建立動力學模型來深入理解其運動特性和相互作用,並對兩個機器人系統進行同步控制,從而更加精確模擬人的兩只手臂運動,才能向類人化操作邁出更加重要的一步。而這通常涉及機械臂運動規劃、力控制、路徑跟蹤等技術,協調控制還需要考慮雙臂之間的相互影響,以及外界環境的幹擾。
本論文研究的雙臂可重構機器人是中科深谷由相同介面模組組成的機器人,能透過移除或添加模組改變自身構形從而適應不同的任務需求,特別適合在極端環境下完成多工。長春工業大學智能機械與機器人創新團隊結合課題組的研究方向以及中科深谷實驗平台等方面,確定了研究的主體和目標,在前期透過對理論的分析和研究,最後為了模仿真實套用場景驗證所提出的協調控制方法有效性,采用了已經在工業、醫療等任務中經過實際驗證並將其完善為研究套件的中科深谷產品,該產品在實驗中表現出了高度可靠性以及研究適配性,是科研驗證的有力選擇。
由於雙臂是以單臂為基礎,是單臂任務的擴充套件,研究雙臂機器人套用工具後的特性和模態,才能有助於雙臂機器人在更廣泛的套用領域中發揮出更大作用。該論文首先基於牛頓-歐拉演算法和運動學分析,分別建立了雙臂機器人和抓取工具的動力學模型,並根據載荷分配方法,將運動力有效地分配到各個機器人上,然後得到了單臂機器人完成搬運任務的動力學模型,以描述被控物件的運動和驅動單元輸入力或力矩之間的關系。
其次,研究采取了基於梯度模型的自適應工具質心位置估計演算法,嘗試改進融合狀態變量函數。梯度模型透過計算目標函數關於參數的梯度,能夠逐步逼近最優解。在雙臂機器人中,這種演算法可以精確估計工具質心的位置,減少因位置估計不準確而導致的誤差,實作雙臂協調控制,從而達到即時反映位置和內力的跟蹤效能的功能,最終能夠提高雙臂協同定位精度與穩定性、最佳化運動規劃與控制、增強適應力與魯棒性。
隨後,研究又利用李雅普諾夫穩定性理論證明了雙臂可重構機器人系統的一致最終有界穩定性,最後透過中科深谷的兩台3自由度機器人進行實驗,驗證了所提出的協調控制方法的有效性。

▍開源產品加快研發行程
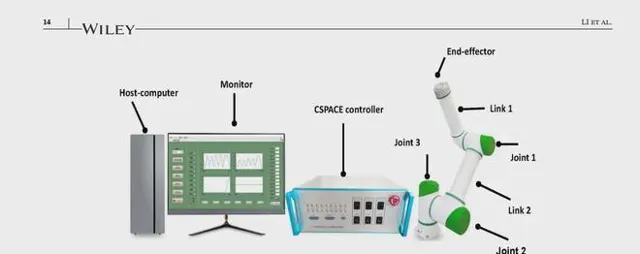
中科深谷的三軸機械臂及即時仿真控制系統對於該項研究起到了重要作用。在該研究中,長春工業大學智能機械與機器人創新團隊基於兩個中科深谷三自由度機器人實驗平台搭建,首先對夾持工具的期望軌跡進行設計,以夾持工具上下不均勻運動作為實驗目標,控制則在中科深谷的三自由度機器人實驗平台上實作。作為一個專為科研和教學設計的多功能機器人系統,中科深谷三軸機械臂具有高精度和靈活性,適用於多種實驗和教育場景,在該科研中加速了研究進展。
在搭建過程中,中科深谷開源的實驗器材很好助力了科學研究。該套器材不僅有強大的硬件器材支持,而且有完全開放的底層數據和程式,長春工業大學智能機械與機器人創新團隊首先基於中科深谷三自由度機器人進行動力學模型的辨識和估計,分別搭建了自適應觀測器和神經網絡觀測器。然後,在此基礎上對兩個機器人進行協調控制器的搭建,在搭建過程時對程式和參數進行多次修改達到期望的效果。

其次,長春工業大學智能機械與機器人創新團隊在設計時還考慮了不變間隔事件觸發機制和時變間隔事件觸發機制,基於中科深谷三自由度機器人測試和比較事件觸發機制下協調控制的作用和影響。其搭建所設計的聯合系統跟蹤效能,估計誤差等反映系統工作狀態的事件觸發條件,在保證系統穩定的同時,適當放縮觸發條件,對比觸發前後的系統效能和能耗情況。
該研究還發現,如何在不確定甚至是未知的模型資訊情況下,對雙臂可重構機器人甚至是多個可重構機器人進行精準的控制難度非常高。另外,可重構機器人一般工作在極端復雜的環境更能發揮其結構特點,如何在資源受限的情況下,在不折損控制精度的同時節約能耗這是另一難點問題。
得益於中科深谷產品的高精度和可靠性,實驗結果還表明,在事件觸發條件下,雙臂機器人系統的無模型控制器更新次數是時間觸發條件下的一半,同時保證了整個操作過程的跟蹤控制精度。事件觸發機制是一種控制策略,它根據系統的實際狀態與預設條件來決定是否進行控制操作,可以判斷系統的收斂速度和穩定性。基於中科深谷三自由度機器人,該實驗透過大量的實驗和測試,最終得出了所提出演算法的有效性,證明了機器人即時系統的穩定性。
中科深谷產品機器人系統效能上不僅有著控制精度和穩定性的優勢,還有著效率和響應速度,尤其在多重約束下的協調控制和互動控制上,該系統也具備極高的響應能力,不僅能助力科研研究,在需要精確操作的任務中,如精密裝配、精細加工等,也能夠顯著提高任務執行效率,提升任務的成功率。

▍結論與未來
當前,隨著人形機器人等新產品進入更多場景,對於機器人可重構特性提出了越來越多的要求。尤其在制造業、服務業、醫療領域等具有高度靈活性的場景中,需要一種可以根據任務或環境的變化而改變構形的機器人。
近年來,可重構機器人在模組化機器人基礎上快速發展延伸,該類機器人可以利用一些不同尺寸和效能的可互換的連桿和模組,根據工作環境和任務裝配成不同構形。這種組合並不是簡單的機械裝配,參與重構機器人的各模組本身就是一種集通訊、控制、驅動、傳動為一體的單元,重構後的機器人將能適應新的工作環境和工作任務。例如,一個可重構機器人可以在不同的生產線任務之間切換,或者在醫療手術中調整其形態以適應不同的手術需求。
正是這樣的結構特點,給可重構機器人的控制器設計帶來了新的問題和難點。需要考慮加入末端工具,或者透過對模組進行組合,能夠簡單快速地裝配成適合不同任務的幾何構型。但重構後的機器人還需要不但能適應新的工作環境和工作任務,並具有很好的柔性,能夠根據環境和任務最佳化自身的結構,快速、有效地地完成任務。
長春工業大學智能機械與機器人創新團隊的研究,最終針對受未知工具約束單個可重構機器人,提出了一種基於局部數據的分布式無模型協調控制器,同時基於中科深谷三軸機械臂,控制器實作了一個通用的多臂機器人協作任務框架,能解決面對不同構形的機器人協作控制任務。

此外,針對雙臂可重構機器人,團隊還提出了基於協調控制器的非周期更新條件。設計的觸發條件可以透過評價工具的運動狀態、質心的估計、內力的穩定性以及補償模型的準確性來調整觸發時間。不僅保證了即時系統的穩定性,而且節約了極端環境下有限的通訊資源。
這項可重構機器人的研究為未來特種機器人與人形機器人套用開發提供了新的思路,在軍事、航天、核工業等領域也具有重大的意義,期待未來看到這項研究未來的套用落地。











