作為軟體機器人領域的重要分支,TSM軟機械手憑借其仿生設計,展現出高安全性、緊湊性、靈活性和靈巧性。這些特性使其得以在水下作業、醫療手術、柔性假肢及人機互動等多個領域得到廣泛套用。
然而,其高度非線性的物理模型仍面臨技術瓶頸,這一問題嚴重限制了效能的進一步提升。
為克服這一挑戰,研究人員在機械設計和控制方法上進行了深入研究,並在機械設計領域創新性探索了氣壓內在驅動、電纜肌腱外力驅動及混合驅動等多種模式,發現了每種模式的獨特優勢與局限性。在控制策略方面,雖然傳統的基於模型的方法取得了一定的成效,但在應對復雜多變的實際環境與未知擾動時往往表現不足。
無模型方法及基於機器學習的新策略,可以透過數據驅動的方式提高控制精度和適應力,因此備受研究人員關註,但同時也仍面臨提高精度和增強抗幹擾能力的挑戰。
▍多校聯合,成功研發TSM
前不久,來自哈爾濱工業大學機器人技術與系統國家重點實驗室、新加坡國立大學和上海交通大學的研究人員對此聯合展開了深入研究,並 受大象鼻子啟發,提出了一種新型的纜線-氣動混合驅動錐形軟體機械手(TSM)的設計和控制方案, 以顯著提升機械手在實際任務中的效能表現。
該研究 開創性地將鮑登管作為驅動肌腱融入設計之中,進而構建了鮑登管與纜線肌腱(BTCT)相結合的復合結構, 這一創舉不僅豐富了軟體機械手的驅動機制,還透過混合驅動拮抗原理的巧妙套用,實作了BTCT與氣動錐形波紋管(PATB)的緊密整合,構建出緊湊而高效的TSM系統。這一設計賦予了TSM卓越的抗軸向拉伸、切向彎曲及扭轉能力,極大地增強了其剛性與靈活性之間的平衡。

為了精準模擬並最佳化TSM的逆運動學效能,研究團隊 采用了前沿的深度學習神經網絡(NN)建模技術。 更進一步,為實作運動控制的高精度與穩定性,他們 精心設計了閉環叠代反饋控制器(IFC) ,該控制器整合了三種先進演算法,並有效融合了尖端傳感器提供的即時位置與方向反饋,確保了機械手在執行任務時的精準無誤。
實驗結果顯示, TSM在空間點定位任務中,於穩定區域內的平均誤差僅為0.17mm,在圓形軌跡跟蹤測試中歷經100次反復試驗,其平均誤差維持在0.87mm,且標準差僅為±0.57mm,此外,其方向控制誤差也嚴格控制在1度以內 。該系統不僅展現出極高的控制精度,還具備強大的環境適應力與魯棒性,具有在復雜多變現實環境中執行高精度任務的巨大潛力,有望成為未來人類作業環境中不可或缺的安全協作夥伴。

該研究成果的相關論文已以「Disturbance-Adaptive Tapered Soft Manipulator with Precise Motion Controller for Enhanced Task Performance」為題發表在【IEEE Transactions on Robotics 】雜誌上 。哈爾濱工業大學為論文第一單位,論文第一作者為博士生李相龍,新加坡國立大學博士生熊泉為論文共同第一作者,通訊作者為機器人技術與系統全國重點實驗室副主任朱延河教授。共同作者包括哈爾濱工業大學機器人研究所所長趙傑教授,上海交通大學自動化系教授王賀升,哈爾濱工業大學鄭天驕副研究員,季華實驗室隋東寶博士,哈爾濱工業大學博士生張清華、李洪武、碩士生王子齊。
接下來,一起來和機器人大講堂深入探索這一研究成果!
▍TSM的結構設計與混合驅動原理
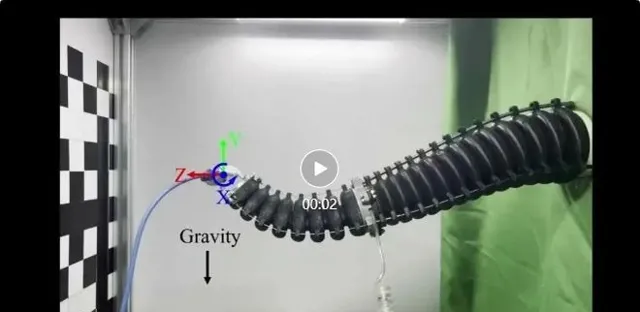
在結構設計方面, TSM的設計靈感來源於大象的鼻子,旨在實作即使在受到擾動(例如重力、摩擦力、外部負載和環境雜訊)的情況下也能保持高運動精度。為了達到這個目的,TSM的基礎部份需要具有很高的剛度以增強承載能力,而靠近尖端的部份則需要具備柔韌性以提高在非結構化環境中的適應力。
具體到結構細節, TSM由兩個具有氣動肌肉功能的PATB組成,這些PATB透過四個步驟制造而成: 使用增材制造技術建立兩個錐形波紋管,錐形波紋管底部的螺紋結構確保與密封板的牢固連線 ,形成帶有內腔的柔性PATB;將預混液體矽橡膠倒入兩段中並牢固地固定密封板以形成密封腔體;透過空氣壓縮機施加壓力使矽橡膠滲透到波紋管表面的微孔中;最後,以每分鐘1轉的速度繞中心軸緩慢旋轉錐形波紋管來固化矽橡膠塗層,在波紋管內表面形成約2毫米厚的矽橡膠塗層。
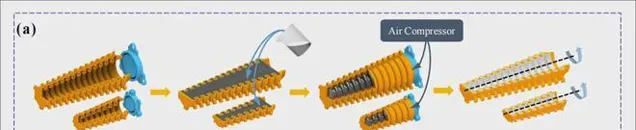
(a)PATB的制造和密封過程
在組裝成完整的TSM機器人系統時,主要包括10個元件: 沿主軸長度為270毫米的第一PATB和沿主軸長度為160毫米的第二PATB。第二PATB的末端連線有一個尖端連線板,該板上固定有負責驅動第二段運動的電纜索。電纜索穿行於鮑登管束之內,其一端固定在中間密封板上,穿過底部密封板後,另一端無縫對接至鮑登管驅動接頭。
PATB橫截面由雙圓弧構成,外半徑8 mm,內半徑6 mm,壁厚3 mm。這些參數最初用於建立底部直徑為100和60 mm的圓柱形橫截面波紋管。

(b)完整TSM機器人的橫截面圖(c)沿TSM機器人主軸的檢視
為了進一步最佳化整體結構,專案團隊運用SolidWorks 3D設計軟件的FLEX模組,設0.4錐度系數,實作圓柱到錐形橫截面轉變。 下圖顯示TSM最終形態:底部直徑100毫米過渡至頂部42毫米,達到視覺對比與功能平衡。驅動筋沿主軸120度對稱分布,增強穩定性,均衡驅動力輸出。
在混合驅動原理方面, 研究團隊 設計了一種創新的電纜-氣動混合驅動結構 。傳統軟體機器人往往依賴於內部氣壓變化來實作形態變化,但這一方法存在諸多限制。該結構 首次將鮑登管引入作為軟體機器人的驅動肌腱 ,利用其獨特的雙向力特性(即推力和拉力),徹底改變了遊戲規則。鮑登管不僅能夠透過推力有效拉長PATB(精密傳動部件),還避免了內部氣壓系統的復雜性和不穩定性,顯著提升了系統的可靠性和響應速度。實驗證明, 在承載2公斤末端負載時,該混合驅動系統仍能精準控制尖端產生僅17毫米的小位移,成功解決了軟體機械手承載效能弱的弊端, 這背後正是鮑登管驅動的耦合力量有效提升了軟體操縱器的切向剛度所致。
這種增強的剛度不僅穩固了TSM在承受自重與外加負載時的形態穩定性,更為尖端實作多段平滑延伸奠定了堅實的力學基礎。更重要的是,剛度的提升直接促進了運動控制精度的躍升與響應靈敏度的顯著增強,為軟體機器人在復雜環境中的精準作業開辟了新路徑。
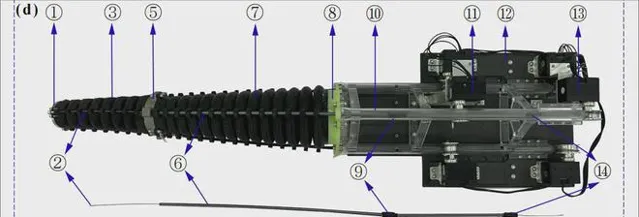
(d)實際制造的TSM機器人系統
為了進一步提升TSM的效能,研究團隊還引入了BTCT(復合肌腱)技術 。BTCT不僅作為擴充套件TSM結構的關鍵部件,還透過其獨特的連續表面接觸和同心管布置設計,有效減少了肌腱傳動過程中的摩擦,降低了2S(第二段)變形對1S(基礎段)的影響。這種最佳化布局不僅提高了傳動精度,還使得整個系統的能量利用效率大幅提升。

TSM的混合驅動原理圖
上圖直觀展示了TSM的混合驅動原理。該系統透過兩個壓力比例閥精確控制PATB的內部壓力,實作軸向伸長。同時,整合復合材料肌腱BTCT則用於抑制PATB內部壓力產生的推力波動,進一步增強剛度。鮑登管驅動接頭和電纜驅動接頭的巧妙組合,實作了對TSM變形的精準控制。電機透過反轉控制鮑登管產生雙向運動,結合電纜的對稱固定和反向纏繞設計,確保了驅動力的穩定傳遞和TSM形態的靈活變化。
為了全面且精確地評估TSM(軟體操作模組)的可變剛度特性,研究團隊設計了針對軸向、切向及扭轉三個維度的剛度測試方案。 在測試中,考慮到PATB(精密傳動部件)的兩種內部壓力狀態,分別在無驅動與驅動條件下進行了對比分析。
軸向剛度測試: 在驅動狀態下,TSM在10mm處的承受力躍升至無驅動時100mm處受力的近兩倍,剛度從0.57 N/mm至10.77 N/mm區間廣泛變化,其變化能力高達1889%,充分展示了混合驅動在軸向剛度上的顯著提升。
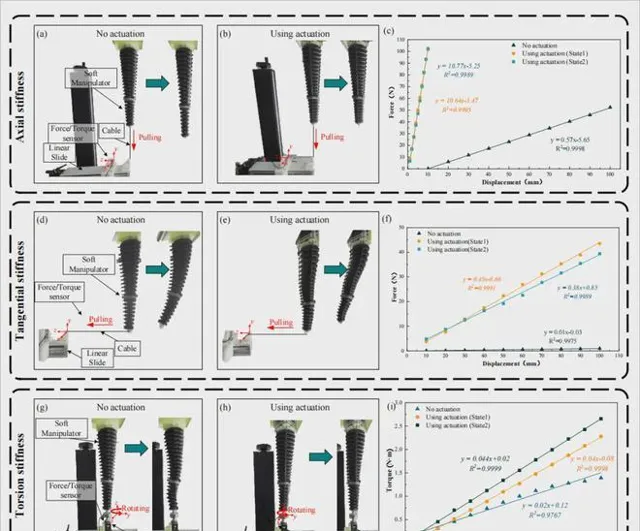
混合驅動剛度的表征
切向剛度測試: 透過實施100mm的切向拉伸測試,TSM的切向剛度在0.01 N/mm至0.45 N/mm之間靈活變化,其變化能力達到了4500%,進一步驗證了混合驅動設計在切向剛度調節上的卓越效能。
扭轉剛度測試: 在60°的扭轉角度下,TSM的扭轉剛度在0.02 Nm/deg至0.044 Nm/deg之間穩定變化,實作了220%的剛度變化能力。尤為值得一提的是,PATB的高彈性模量(與生物軟骨相媲美)在增強扭轉剛度方面發揮了關鍵作用,顯著提升了TSM抵禦外部幹擾的能力,確保了其在復雜環境中的穩定性。
這一系列實驗數據有力證明了混合驅動方法透過復合肌腱BTCT與PATB的緊密協作,不僅極大地增強了TSM的剛度特性,還顯著提升了其負載承載能力,並有效降低了精確控制的技術門檻,為軟體機器人領域的高精度運動控制提供了堅實的理論與實踐基礎。
▍TSM的逆運動學建模
在傳統的剛性機器人運動學中,逆運動學通常可以透過解析方法求解,即直接根據目標位置和姿態計算出所需的關節角度。然而,對於軟體機械臂來說,由於其高度的可變形性,這種直接的解析方法不再適用。 軟體機械臂的復雜、非線性行為使得基於力、材料內容和幾何形狀等因素預測其變形變得困難,因此無法直接獲得逆運動學的解析。
為了解決這些挑戰, 研究團隊采用了一種基於深度學習的神經網絡(NN)方法作為逆運動學模型的近似器,來提高軟體機械臂逆運動學建模的準確性和效能。
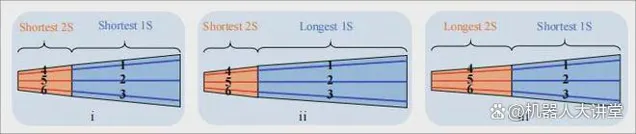
用於校準和解耦執行器變量的三種預定義標準配置
具體來說,該方法使用一個訓練有素的神經網絡來學習從輸入(如施加的力量和期望的位置/姿態)到輸出(關節角度)之間的對映關系。透過這種方式,神經網絡能夠捕捉並建模軟體機械臂的非線性動力學行為,從而提供更為精確的逆運動學解決方案。
為了提高逆運動學解的精度,研究團隊引入了局部連續性的概念, 即在任務空間的局部區域內,末端執行器位置的微小變化應導致執行器參數成比例變化。透過定理轉換,將非線性對映問題簡化為局部線性問題,從而提高了逆運動學解的穩定性。
此外, 針對Boden Tube Cable Transmission (BTCT)肌腱的耦合關系,研究團隊團隊創新性地采用了三個標準化的預配置策略, 對執行器變量實施了解耦預處理,確保了運動控制的精準無誤,為軟體機械臂的精細操作奠定了堅實基礎。
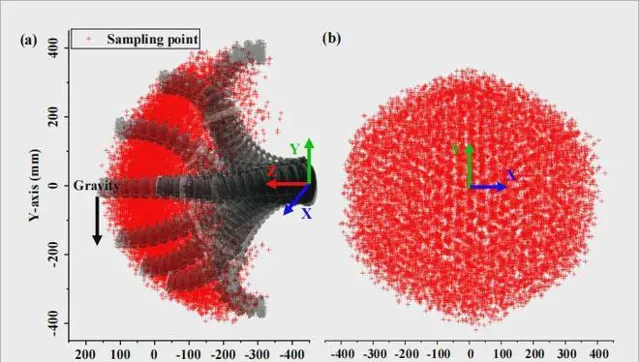
TSM尖端上的任務空間采樣數據集
在神經網絡訓練與配置環節,研究團隊透過Intel RealSense T265網絡攝影機精準追蹤TSM尖端的位置與方向,並同步采集電機編碼值,構建了一個包含15,625個樣本的豐富數據集,並科學劃分為訓練集與驗證集。
所設計的NN模型,以六層架構精心搭建,內含四個深層隱藏層, 每層精心配置了適量的神經元(依次為512、512、256、256),並輔以輸入輸出層各六神經元,采用Sigmoid啟用函數啟用神經元活力,Adam最佳化器則以其高效性引領學習率最佳化之旅,確保學習步伐穩健前行。訓練過程中,團隊靈活運用提前停止策略,有效遏制了過擬合現象,當驗證集上的均方誤差(MSE)連續150步降幅小於1%時,果斷終止訓練,確保了模型的泛化能力。
訓練成果顯示,訓練集與驗證集的R平方值分別為0.8774與0.8597, 這使得NN模型可以作為軟機械手尖端初始定位的通用解決方案。為了進一步實作軟機械手的精密運動控制,研究人員在NN模型基礎上提出了閉環叠代反饋控制器的融合定位演算法。
▍閉環叠代反饋控制器(IFC)設計
為了減少軟機械手尖端實際狀態與期望狀態之間的誤差,實作軟機械臂的高效能定位控制和動態軌跡跟蹤,研究團隊 精心設計了一種閉環叠代反饋控制器(IFC)。

叠代反饋控制器(IFC)控制器的邏輯示意圖
IFC系統根據控制參數和任務需求,將控制器分解為三種演算法,協同工作以實作高效控制:
1、恒增益叠代反饋控制器(CG-IFC)
生成虛擬期望狀態,並根據實際狀態與幾何期望狀態的偏差進行叠代校正,逐步逼近真實期望狀態。透過神經網絡逆運動學模型,將虛擬期望狀態轉換為執行器控制輸入,實作精確定位。
2、變增益叠代反饋控制器(VG-IFC)
針對動態軌跡跟蹤的挑戰,在CG-IFC基礎上增加滑動視窗積分項,以補償系統誤差積累,提高動態跟蹤精度。盡管有效,但積分項可能引入速度方向偏差和雜訊幹擾。
3、濾波器最佳化的叠代反饋控制器
為進一步最佳化VG-IFC在動態軌跡跟蹤中的表現,引入濾波演算法,在多個叠代間隔內平均誤差,以減少雜訊影響,穩定軟機械手尖端速度,確保精確沿期望軌跡移動。透過調整平滑間隔,平衡控制精度與穩定性。

TSM的系統架構
透過CG-IFC、VG-IFC及濾波器最佳化的協同作用,最佳化叠代反饋控制器 有效提升了軟機械手在高精度定位控制和動態軌跡跟蹤方面的效能, 為復雜環境下的精密操作提供了了堅實可靠的技術支撐。
▍效能實驗與測試
透過將所提出的控制方法套用到TSM上,並進行多種實驗,研究人員就其效能進行了驗證。 實驗設計圍繞字母「HIT」的3D靜態點定位、圓形軌跡動態跟蹤、水平糊垂直軌跡動態跟蹤等核心任務展開,並輔以方向控制和擾動實驗,全面評估了控制系統的精確性和魯棒性。
實驗架構精簡高效,上下位機協同作業:上位機(NUC8i7BEH6)基於NN逆運動學計算控制指令,透過序列通訊傳至下位機(OpenCM.04),後者利用RS485介面精準操控電機與驅動器,實作TSM變形。TSM尖端配備高頻定位傳感器(Realsense T265),確保閉環控制即時反饋,求解迅速(僅5毫秒)。

FOVG-IFC方法的圓軌跡動態跟蹤
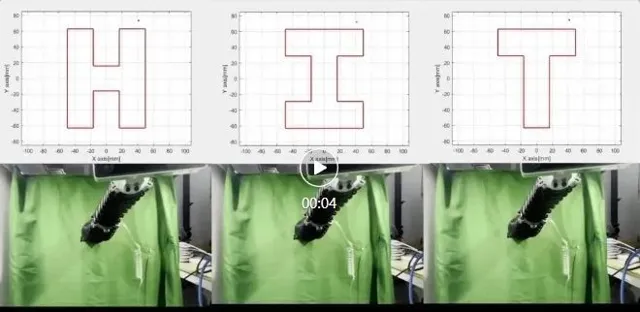
HIT 輪廓軌跡定位←
恒定空間點的姿態跟蹤控制
實驗結果顯示:TSM展現出超高精度的3D點定位能力,誤差範圍縮至亞毫米級;在動態軌跡跟蹤中,NN與FOVG-IFC演算法的強強聯合顯著削減了誤差,提升了跟蹤穩定性;面對復雜多變的「HIT」軌跡,TSM亦能遊刃有余,展現出非凡的運動控制能力;方向控制精確無誤,誤差控制於極低水平;擾動實驗中,TSM展現了出色的自我恢復能力,迅速回歸穩定狀態;遙操作抓取實驗驗證了人機互動的直觀性與便捷性;而在雜亂環境下的無碰撞操作及在壓力幹擾存在下的自適應清潔任務中,TSM更是彰顯了其在人機協作領域的巨大潛力。

雜亂環境下的避障精密抓取←

人手壓力幹擾時的WordPad擦拭測試
以上結果表明,研究團隊提出的這一控制方法不僅大幅增強了TSM的運動精度與魯棒性,更為其在多樣化復雜場景中的廣泛套用奠定了堅實基礎。展望未來,隨著技術的持續精進與叠代最佳化,TSM有望在人類協作與輔助機器人領域扮演更加關鍵的角色。
參考文章:
https://ieeexplore.ieee.org/document/10577463/authors











