雖然機器人已經開始在現代制造業、醫療、服務業等領域進行滲透,但對於機器人尤其是機械臂的操作能力,仍然有很大的提升空間,傳統多指機器人手雖然能夠實作復雜的操作任務,但其高度冗余性也帶來了不必要的復雜性。近日來自 普渡大學和麻省理工學院的研究團隊 開發了 一款配備觸覺傳感器的5自由度(DoF) 觸覺 雙指抓手 , 該設計能夠 簡化的機械結構和增強的觸覺感知能力,實作更高效、更精確的在手操作。
▍ 5 DoF觸覺感知抓手的設計原理與技術亮點
傳統 仿生靈巧手 雖然功能強大 , 但復雜的機械結構增加了系統的不穩定性和維護成本。 為了克服這個問題,研究團隊, 采用雙指 夾具 設計,並結合線性執行器和旋轉伺服電機,實作了 5 DoF 的操作空間。 這種設計的好處在於不僅降低了機械復雜度,還一定程度上提高了系統的可靠性和可維護性。
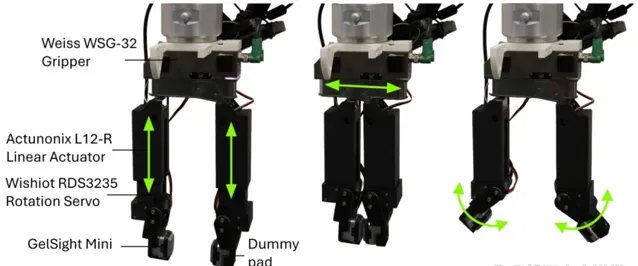
研究人員表示,這款5 DoF特殊客製的夾具, 每只手指配備了一個線性執行器 (Actunonix L12-R)用於實作沿手指長度的直線運動,以及 一個旋轉伺服電機 (Wishiot RDS3235)用於調整手指的旋轉角度。這種組合提供了在三維空間中的靈活操作能力, 使抓手能夠執行捲動、旋轉和線性位移等多種操作模式。
為了提升抓手的感知能力, 研究團隊整合了GelSight Mini觸覺傳感器 。這款傳感器能夠提供高分辨率的觸覺影像,讓機器人能夠「看到」並理解物體的形狀、紋理和接觸力。這種視覺化的觸覺反饋為機器人提供了豐富的環境資訊,使其能夠在無視覺輔助的情況下準確判斷物體的狀態和位置。
為了進一步最佳化觸覺感知效果,研究團隊將 觸覺傳感器安裝在左手手指的指尖位置 。該位置既能最大限度地感知到物體與手指的接觸情況,又不會因為安裝位置不當而影響手指的靈活性和穩定性。同時,為了應對不同形狀和材質的物體,研究團隊還為右手手指配備了一個可更換的軟質假指墊。這種設計增加了抓手的通用性和適應力,使其能夠處理更多種類的物體。
在實際操控方面,研究團隊透過5 DoF的設計,抓手能夠在三維空間中自由移動和旋轉物體,從而實作更復雜的操作任務。其次,利用觸覺傳感器的反饋資訊,機器人能夠即時調整操作策略以應對環境的變化和物體的不確定性。例如,在抓取過程中,機器人可以根據觸覺影像的變化動態調整抓手的寬度和力度以確保穩定抓取;在分離物體時,機器人可以透過觸覺反饋感知到附著在物體表面的顆粒介質並采取相應的去除措施。
▍整合觸覺傳感器 5 DoF靈巧手技術亮點解讀
GelSight Mini觸覺傳感器的整合是 該靈巧手最大的亮點之一 , 這款傳感器能夠提供高分辨率的觸覺影像數據,使機器人能夠「看見」物體的形狀、紋理和接觸力分布情況。這種視覺化的觸覺反饋極大地增強了機器人的感知能力,並為其執行精確操作提供了有力支持。例如,在抓取信用卡時,機器人可以透過觸覺影像準確判斷信用卡的姿態和位置資訊,並據此調整抓手的操作策略以實作精確插入。
與傳統多指機器人手相比,研究團隊開發的雙指設計大大簡化了機械結構並降低了冗余性。該設計不僅減輕了抓手的整體重量和負載要求還提高了系統的可靠性和可維護性。例如,在發生故障時維修和更換零部件變得更加容易和快速,同時簡化的結構也減少了控制演算法的復雜度和計算量提高了系統的即時效能。
研究人員 透過線性執行器和旋轉伺服電機的組合實作了 5 DoF 的操作空間 , 使其能夠在三維空間中自由移動和旋轉物體從而實作更復雜的操作任務。例如,在抓取薄片物體(如信用卡)時抓手可以透過調整手指的角度和位置來穩定地夾持物體並避免滑落;在執行插入任務時抓手可以精確地調整物體的姿態以確保其順利插入預定位置。
為了進一步提高操作的穩定性和準確性, 研究團隊還 開發了一種基於模型預測控制(MPC)的控制演算法。 該演算法能夠根據觸覺傳感器提供的即時數據預測未來的操作狀態並最佳化控制輸入以實作預定目標。透過不斷叠代和最佳化控制策略機器人能夠在面對復雜環境時保持高效和穩定的表現。這種閉環控制策略不僅提高了操作的精確性還增強了機器人的適應力和魯棒性。
▍ 兩大測試 結果表明該觸覺抓手擁有較高穩定性和準確性
為了全面評估所設計的5 DoF觸覺抓手的效能,研究團隊進行了兩項具有挑戰性的實驗任務:一是從顆粒介質中分離、抓取並分類各種物體;二是使用抓手執行信用卡的撿拾操控任務,包括精確插入讀卡器。
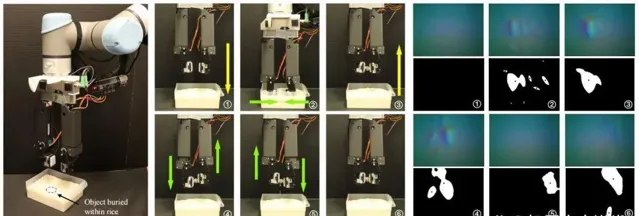
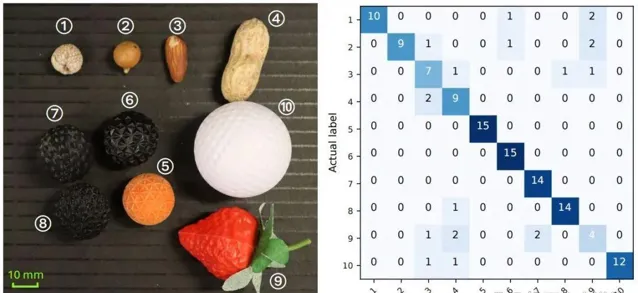
實驗采用了一台UR5e機器人作為操作平台,搭載了設計的5 DoF觸覺抓手。為了模擬真實環境中的顆粒介質,研究團隊選擇了大米作為實驗介質,並將其置於一個尺寸為135×112×55mm的塑膠容器中,填充深度約為30mm。為了評估抓手的通用性,實驗中選取了包括小球、堅果、軟球、3D打印硬質球、大型高爾夫球和人造草莓在內的10種不同尺寸、形狀和物理特性的物體。
在抓取過程中,GelSight Mini觸覺傳感器即時采集觸覺影像數據,這些數據透過影像處理演算法轉換為接觸區域影像和深度資訊。透過設定閾值對深度影像進行二值化處理,可以提取出高精度的接觸區域影像,為後續的抓取和分類任務提供關鍵資訊。
1. 物體分離與分類實驗
在物體分離與分類實驗中,抓手首先被插入顆粒介質中,透過觸覺模型預測控制(MPC)演算法穩定地抓取目標物體。隨後,抓手執行一系列精細的在手操作,以去除附著在物體表面的顆粒介質。實驗結果顯示,抓手能夠成功地從顆粒介質中分離出各種物體,並對其進行初步分類。
實驗結果表明,對於10種測試物體,該抓手總體成功率為76%(114次成功/150次嘗試)。特別地,對於球形物體(包括各種球類和種子),成功率高達94.3%(99次成功/105次嘗試)。 這表明抓手在處理球形物體時具有極高的穩定性和準確性。
2. 信用卡 撿拾 與精確插入實驗
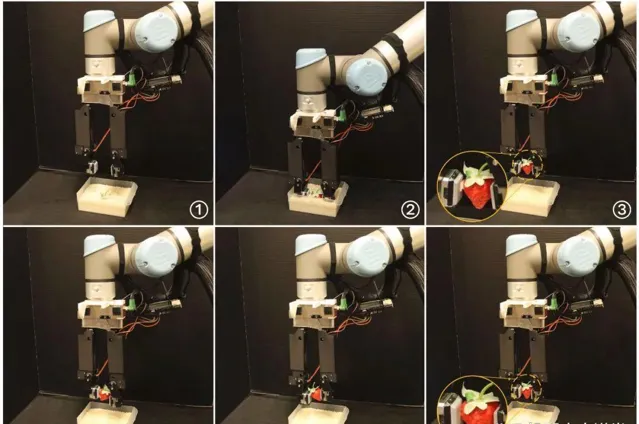
在信用卡撿拾與精確插入實驗中,抓手首先執行撿起操作以穩定抓取放置在平面上的信用卡。隨後,透過一系列精細的在手操作調整信用卡的姿態和位置,最終實作精確插入讀卡器。實驗結果顯示,抓手在連續10次嘗試中均成功完成了撿拾、姿態調整和精確插入任務,成功率為100%。
在初始撿拾階段,抓手透過平行配置的手指邊緣穩定抓取信用卡並約束其位置。在撿拾過程中,觸覺傳感器即時提供信用卡的姿態資訊,指導抓手進行精確的在手操作。最終, 在確認信用卡姿態正確且位置準確後,抓手擡起並執行插入動作。
▍結果分析
1. 抓取穩定性與成功率
實驗結果表明, 抓手在處理球形物體時表現出極高的抓取穩定性和成功率。 這主要歸功於球形物體在抓取過程中的均勻接觸特性和觸覺傳感器的高精度反饋。然而,對於非球形物體(如堅果和人造草莓),抓取成功率相對較低。
2. 觸覺反饋的有效性
觸覺傳感器在實驗中發揮了關鍵作用。 透過提供高精度的觸覺影像數據,傳感器使機器人能夠即時感知物體的形狀、姿態和接觸力資訊,從而指導抓取和在手操作。特別是在信用卡撿拾與精確插入實驗中,觸覺反饋確保了機器人能夠準確判斷信用卡的姿態並進行精確調整。
3. 控制演算法的效能
基於觸覺模型預測控制(MPC)的控制演算法在實驗中表現出了良好的穩定性和準確性。 該演算法能夠根據觸覺傳感器提供的即時數據預測未來的操作狀態並最佳化控制輸入,從而確保機器人在面對復雜環境時能夠保持高效和穩定的表現。
▍ 結語與未來:
研究團隊開發的5 DoF觸覺抓手,透過簡化機械結構與整合高精度觸覺傳感器,顯著提升了機器人在復雜環境中的操作能力。其核心價值在於,視線機器人低成本,可靠性的手部靈巧操作,為商業化的大規模普及做鋪墊。研究人員表示,該技術未來可套用於工業自動化、醫療手術、家庭服務等多個領域,透過提升操作精度與效率,減少人工幹預。











