來自美國西北大學的工程師們發明了一種新型柔軟、靈活的軟體致動器裝置,使機器人能夠透過擴張和收縮模仿人類肌肉的運動,從而達到移動物體的目的。
在這項研究中,致動器(裝置)被用於制造一個圓柱形蠕蟲狀軟機器人和一個人造二頭肌。機器人可以在狹小的空間中行走,二頭肌可以輕松舉起 500 克的重物 5,000 次。每個機器人由標準橡膠制成,成本約為 3 美元,不包括幫助致動器改變形狀的小型馬達。該團隊表示,這種方法比傳統的剛性致動器便宜得多,後者可能要花費數百或數千美元。
這項研究由西北大學麥考密克工程學院材料科學與工程和機械工程系的 June andDonald Brewer Junior 教授 Samuel Truby以及博士後學者、論文第一作者 Taekyoung Kim 領導,機械工程博士候選人 Pranav Kaarthik 也參與其中。這項研究題為「A Flexible, Architected Soft Robotic Actuator for MotorizedExtensional Motion/一種用於線性伺服驅動運動的靈活、結構化的軟機器人致動器」,發表在【先進智能系統】雜誌上。

相關論文連結:https://onlinelibrary.wiley.com/doi/full/10.1002/aisy.202300866
「機器人專家長期以來的目標就是讓機器人更安全,」西北大學的 Ryan Truby 說道,他領導了這項研究。「如果軟機器人撞到人,傷害不會像被堅硬的機器人撞到那麽大。我們的致動器可用於更適合以人為中心的環境的機器人。而且,由於它們價格低廉,我們有可能以歷史上成本過高的方式更多地使用它們。」
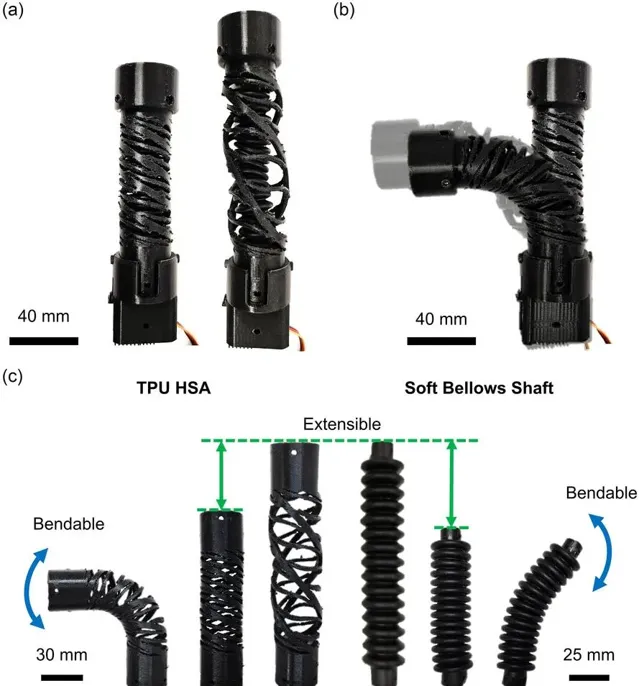
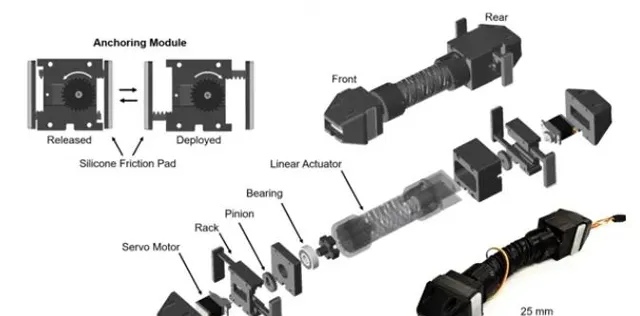
△專為電動拉伸運動而設計的軟機器人執行器。靈活的軟機器人執行器 a) 透過伺服旋轉線性伸展,b) 即使在因外部負載而彎曲時也是如此。c) 執行器由熱塑性聚氨酯 (TPU) 手性剪下膨脹 (HSA) 主體和軟波紋管軸組成。照片中展示了這兩個元件的可延展性和可彎曲性。
仿生軟體致動器:增強機器人的機動性和靈活性
剛性致動器傳統上一直是機器人設計的主導,但它們的剛性和安全性問題促使研究人員開始探索軟致動器。受人類肌肉同時收縮和僵硬的啟發,特魯比和他的團隊開發了一種新型致動器。
該團隊用橡膠 3D 打印了圓柱形「手性剪下膨脹材料」(HSA),這種材料在扭曲時可以實作獨特的運動,如伸展和膨脹。研究人員表示,之前使用昂貴印表機用硬質塑膠樹脂制成的 HSA 版本缺乏靈活性和可變形性。
Kim 透過使用熱塑性聚氨酯(一種用於手機外殼的材料)和經濟高效的桌面 3D 印表機解決了這些限制。這使 HSA 變得更軟、更靈活,盡管扭轉它們進行延伸和擴充套件仍然是一個挑戰。
早期的軟致動器需要多個伺服電機來扭轉,這會使制造過程復混成,並降低柔軟度。Kim 透過添加柔軟、可伸縮的橡膠波紋管作為可變形的旋轉軸解決了這個問題,使單個伺服電機能夠向任一方向伸展或收縮致動器。
添加波紋管後,Kim 可以使用單個致動器制造出爬行軟體機器人。與早期的軟體機器人不同,這款 26 厘米長的機器人每分鐘移動超過 32 厘米,可以在狹窄空間內導航,並且在致動器伸展時變硬。
研究團隊表示,軟體致動器在操作時能夠像人類肌肉一樣變硬,這是一項重大進步。與傳統機器人相比,這一仿生功能增強了運動能力,擴大了軟體機器人可以執行的任務範圍。

△西北大學研究人員設計的新型爬行機器人可以在狹窄的管道環境中行走。圖片來自西北大學。
3D打印肌肉在運動
3D 打印肌肉代表著一個有前途的研究領域,有可能對肌肉修復和再生方法產生重大影響。一個例子是意大利理工學院(IIT) 的研究人員開發了一種配備 SLA 3D 打印人造肌肉(稱為 GRACE 致動器)的機械手,該機械手可復制類似人類的抓握效率。
這些致動器重量僅為 8 克,可以舉起重達自身重量 1,000 倍的物體,並允許機械手執行復雜的動作,例如彎曲手指和扭動手腕。由樹脂膜打印而成的 GRACE 致動器展示了 3D 打印肌肉的潛力,可以模擬生物功能,並且具有更高的多功能性和強度。
早在 2017 年,哥倫比亞大學的科學家就開發出了一種3D 打印合成肌肉,能夠舉起高達自身重量 1,000 倍的重量。該團隊描述了一種致動器,它使用與乙醇混合的 PMSD 基矽膠彈性體來模擬人體肌肉的擴張和收縮。
當施加電壓時,乙醇的相變會導致材料大幅膨脹和收縮。這種「肌肉」兼具高應變和高應力以及低密度,有望為簡單的手工任務制造栩栩如生的仿生身體部位。











