想象一下,一顆小小的種子,竟能成為軟機器人的靈感源泉!在科技的奇妙世界裏,受牻牛兒苗科種子啟發,研究人員利用 4D 打印技術,打造出了具有獨特效能的軟機器人——【4D Printing of Humidity‐Driven Seed Inspired Soft Robots】發表於【Advanced Science】。這些機器人能夠像種子一樣,在濕度變化的驅動下自主運動,甚至可以探索土壤。讓我們一起走進這個神奇的研究,揭開軟機器人背後的奧秘,看看自然與科技是如何完美融合的。
*本文只做閱讀筆記分享*
一、引言
軟機器人領域因其利用材料的適應力和可變形性來構建智能變形機器而備受關註。在環境套用中,軟機器人需要能夠移動、生長、適應環境刺激並可生物降解。同時,為滿足機器人領域的能源需求,需要開發利用可再生能源的自主機器人。生物啟發為軟機器人設計提供了思路,例如牻牛兒苗科種子,其獨特的吸濕運動機制可用於促進軟機器人的設計。本文將介紹受牻牛兒苗科種子啟發,透過4D打印技術制造的軟機器人的研究過程和成果。
二、自然種子的結構與運動機制
(一)天竺葵屬植物種子結構
以Pelargonium appendiculatum種子為例,它主要由三部份組成:
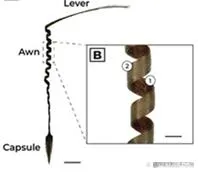
蒴果:包含種子胚胎,透過各向異性摩擦將旋轉運動轉化為掩埋行為,將種子結構錨定在土壤中。
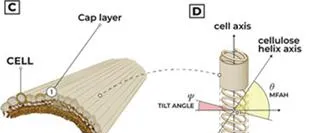
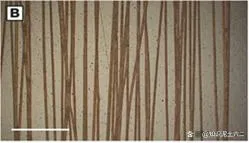
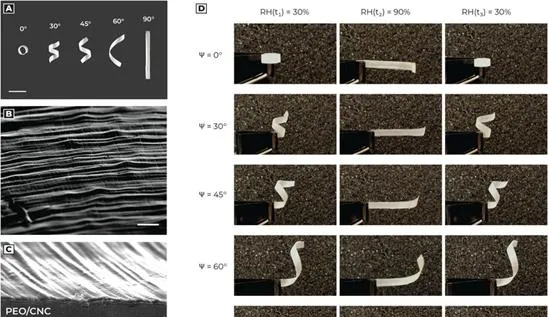
芒:是獨立的吸濕驅動器,其內部的纖維素微纖維沿圓柱細胞呈螺旋排列。
芒的橫切面呈雙層結構,由富含木質素的厚壁組織細胞和一層較大細胞組成,其厚度分別為hCap = 39.8±6.9μm和hRidge = 59.7±9.8μm (n=6)。

杠桿:作為被動元件,允許種子自我提升並施加扭矩,起到錨定作用。杠桿區域的細胞結構與芒不同,其纖維素濃度均勻分布,是結構中的非吸濕元件。
(二)種子的運動機制
1.芒的運動原理
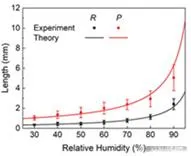
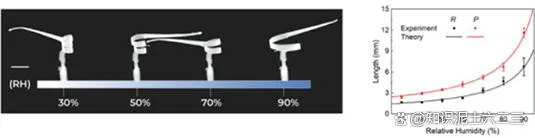
芒的卷曲配置由微纖維的幾何排列決定,其角度包括傾斜角Ψ(纖維素螺旋軸與細胞軸之間的角度)和纖維素微纖維角θ(相對於纖維素螺旋軸)。透過實驗測量(如使用小角度X射線散射),Pelargonium peltatum和appendiculatum的傾斜角為15°±5°,微纖維角θ範圍從70°到80°。從宏觀角度,芒的螺旋運動還可透過半徑R和螺距P來描述,它們隨相對濕度(RH)變化。
2.運動的理論建模
為預測種子的運動行為,可將吸濕結構分為三層進行建模。根據相關理論,應力可表示為σ=DαΔΦ,其中D是材料剛度,α是吸濕膨脹系數(CHE),ΔΦ是相對濕度的變化。透過這種建模方式,可以預測芒在不同濕度下的運動參數,如透過實驗驗證,模型能夠較好地預測螺距P和半徑R在不同濕度範圍內的幾何變化。
3.力和力矩的產生
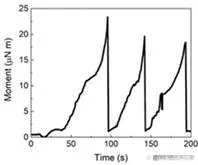
種子的運動能力由芒產生的力F(拉伸力)和力矩M0(彎曲和扭轉的組合)介導。
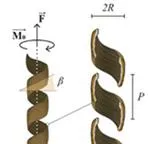
這些力和力矩可透過彈性理論建模,考慮芒為具有矩形橫截面的均勻開卷圓柱螺旋彈簧,並考慮水在帽層組織中的滲透模型。透過實驗測量,在特定濕度變化下,力矩的最大值為20.7±2.5 μNm,雖然模型預測值為57.7μNm,存在一定偏差,但模型仍在一定程度上能夠描述種子的運動行為,為人工種子的吸濕驅動器設計提供參考。
三、軟機器人的設計與制造
(一)4D打印吸濕驅動器
1.結構設計
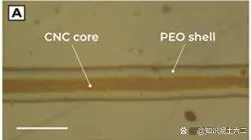
吸濕驅動器透過雙層結構模擬芒的變形。被動層采用FDM打印PCL熱塑性材料,主動層由同軸靜電紡絲沈積的PEO/CNC吸濕纖維組成。這種設計結合了FDM和靜電紡絲技術的優勢,增加了軟機器人原型制作的自由度。
2.材料特性
PCL:是一種熱塑性半結晶脂肪族聚酯,具有可生物降解、化學抗性、濕度惰性、靈活性和伸長能力等優點,適合FDM打印。透過表面啟用處理(如氧等離子體處理),可增加其與親水纖維的粘附性。
PEO/CNC纖維:由纖維素納米晶體(CNC)核心和聚乙烯氧化物(PEO)外殼組成,具有酶促生物降解行為。CNC在聚合物基質中可增加吸濕變形能力,且不影響PEO的吸濕膨脹系數(CHE)。纖維的平均直徑為12.7 ± 0.9μm,CNC核心直徑為5.4 ± 1.2μm,纖維取向度為90° ± 3°。
3.效能評估
擴散系數:透過實驗測量和計算,評估水在帽層的擴散系數D,為2.3±0.7×10-11m2s-1。
力學效能:透過動態納米壓痕和拉伸試驗測量纖維層的力學效能。與純PEO纖維相比,PEO/CNC纖維的儲能模量有顯著增加。
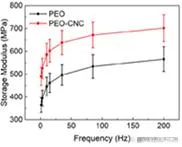
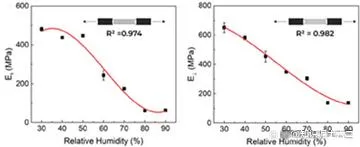
纖維層的楊氏模量隨相對濕度增加而降低,且在縱向和橫向排列上表現出各向異性。
(二)人工種子的設計與效能
1.設計過程
人工種子的設計基於對P.appendiculatum種子的生物力學表征、建模以及上述4D打印技術和材料特性。

人工蒴果的設計參考自然種子的輪廓並調整尺寸,人工杠桿設計為三角形輪廓。
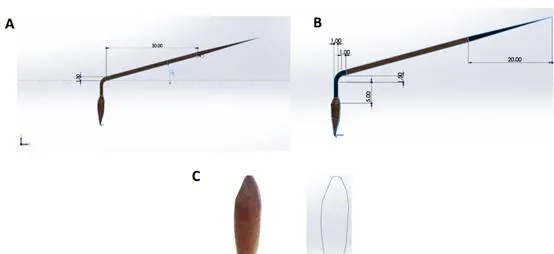
選擇合適的尺寸參數,如寬度b = 1523±54 μm,長度l=30.3±1.1 μm,被動層厚度hp=100.7±4.6 μm,主動層厚度ha=72.9±6.5 μm。纖維沈積方向設定為與自然種子的傾斜角Ψ=15°相同,以更好地比較效能。
2.效能測試
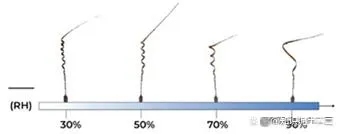
運動參數:透過實驗和建模評估人工種子的運動參數,如螺距和半徑隨相對濕度的變化。人工種子的擴散常數為4.7±0.5×10-11m2s-1,約為自然種子的兩倍。
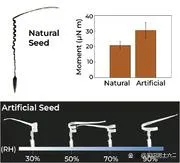
力和力矩:測量人工種子的拉伸力和力矩,並與自然種子進行比較。人工種子的最大拉伸力為Fmax=2.40±0.58mN,最大力矩為M0 max=30.4±5.1 μNm。人工種子的動力學比自然種子慢,這與活性層厚度和擴散系數的關系有關。

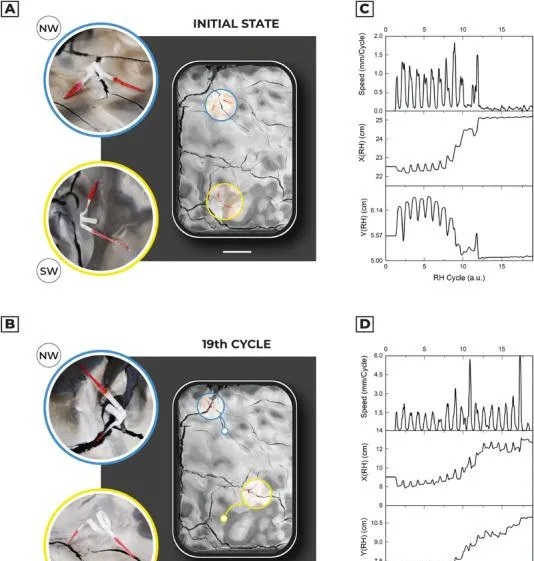
土壤探索:測試人工種子在土壤中的運動能力,將其置於具有不同粗糙度和裂縫的模擬土壤中,在濕度變化的環境下觀察其運動。結果表明,人工種子能夠適應土壤環境,其運動受到濕度驅動,不同的人工種子表現出不同的運動行為,如穿透裂縫、定向移動或在局部捲動。
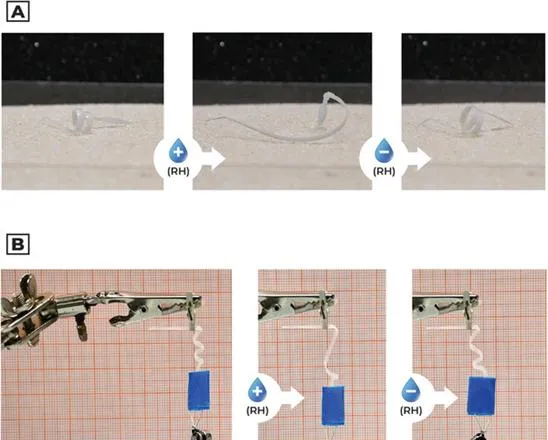
重物提升:對人工種子進行重物提升測試,將1g重物固定在人工膠囊上,透過改變濕度,吸濕驅動器能夠提升約120倍自身重量的重物,提升高度為5mm,對應的絕對勢能約為。但隨著相對濕度增加,吸濕層的極限拉伸應力降低,可能導致纖維機械屈服,影響結構恢復初始位置的能力。
四、研究結論
(一)軟機器人的效能優勢
透過4D打印制造的軟機器人在形態、驅動機制和靜態效能上與自然種子相似。吸濕驅動器作為一種可再生能源解決方案,適用於環境土壤探索。自然和人工吸濕種子驅動器分別具有一定的能量密度,實驗測得的驅動器能量密度峰值約為,與現有軟吸濕驅動器相當。
(二)設計的權衡考慮
在軟機器人設計中,種子機器人的幾何尺寸、材料選擇和纖維方向性需要根據具體場景進行權衡。幾何尺寸的增加會導致力和力矩的增加,但動力學速度會變慢。
(三)可持續發展的意義
本研究中使用可生物降解材料和環保加工方法對可持續和綠色機器人的發展至關重要,可避免在自然環境中產生新的廢棄物,無需進行回收操作。
(四)潛在套用價值
這種受種子啟發的軟機器人可用於環境表土監測,整合采樣和傳感功能,是一種簡單低成本的數據采集系統,可在遠端地區原位收集具有高時空分辨率的數據。
1、軟機器人在環境套用中應具備以下哪些特性?( )
A. 僅能移動
B. 移動、生長、適應環境刺激且可生物降解
C. 無需適應環境
D. 不可生物降解
2、Pelargonium appendiculatum 種子芒的卷曲配置由哪些角度決定?( )
A. 僅傾斜角Ψ
B. 僅纖維素微纖維角θ
C. 傾斜角Ψ和纖維素微纖維角θ
D. 與角度無關
3、吸濕驅動器的被動層采用什麽材料制造?( )
A. PEO
B. CNC
C. PCL
D. 以上都不是
4、人工種子設計中,纖維沈積方向設定為與自然種子的哪個角度相同?( )
A. 傾斜角Ψ=15°
B. 纖維素微纖維角θ= 15°
C. 傾斜角Ψ=30°
D. 纖維素微纖維角θ= 30°
5、軟機器人設計中,幾何尺寸增加會導致什麽結果?( )
A. 力和力矩減小,動力學變快
B. 力和力矩增加,動力學變慢
C. 力和力矩不變,動力學不變
D. 僅動力學變慢
6、本研究中軟機器人使用的材料對可持續發展的意義在於( )
A. 材料不可生物降解,增加廢棄物
B. 材料可生物降解,避免新廢棄物產生
C. 材料價格昂貴
D. 材料與可持續發展無關
參考文獻:
Cecchini L, et al. 4D Printing of Humidity-Driven Seed Inspired Soft Robots. Adv Sci (Weinh). 2023 Mar;10(9):e2205146.











