
手術機器人是醫療人工智能的前沿成果,其具備刑事主體地位的「奇異點」界分是完備意識與自由意誌的有無。「奇異點」之前的手術機器人,由於缺乏悟識意識與感受意識而無責任能力與刑罰可罰性;「奇異點」之後的全自主強機器意識型手術機器人可能對刑法人類中心主義造成沖擊,不具有賦予其與人類平等主體地位的正當性。在手術機器人介入下,醫務人員客觀行為基準的不確定性與結果預見能力的差異性加強。對「嚴重不負責任」的認定可以根據手術機器人的成熟和普及程度采用不同的過失犯理論:在「實踐上的醫療水準」參考依據欠缺、「一般人的預見能力」模糊的「過渡期」采用「修正的舊過失論」;期間不斷完善配套規則,建立不同類別手術機器人輔助醫療活動場景下醫務人員的分級註意制度;在「成熟期」采用「新過失論」,限縮醫療事故罪的犯罪圈,以此保證醫患權益雙向平衡的同時促進醫療科技的發展。

一、問題的提出
2024年3月13日,歐盟議會透過了全球首部【人工智能法案】(ai act),緊隨其後,在3月16日,中國「ai善治論壇」亦釋出了【人工智能法(學者建議稿)】,人工智能領域監管正迎來新時代。手術機器人作為最前沿的醫療人工智能技術,在醫療活動中的投入逐年攀升,在極大提升醫療水平的同時帶來的安全風險也引起關註。例如,當前套用最廣泛、技術最成熟的達芬奇手術機器人在2000年至2013年致死人數多達一百四十四人。而2015年「英國首例機器人心瓣手術失敗致患者死亡」亦傳遞出手術機器人輔助診療的較高風險性與規制必要性的訊號。手術機器人介入情形下醫療事故的刑事責任成為目前難以回避的重要理論課題。
醫療事故罪屬於輕罪,在「寬嚴相濟」刑事政策下,刑法既要著眼於保障患者利益,也要註重醫療行業的長遠健康發展和醫務人員群體的權利保障。手術機器人套用場景下,醫務人員在診療活動中的註意事項、註意能力等可能會因暫時「解放眼和手」而在一定程度和範圍發生變化,該變化是否影響醫療過失的認定?這牽涉到手術機器人是否具有刑事主體地位、對過失認定采用何種路徑等問題。對此,目前學界討論較少。本文透過交叉學科研究和理論學說的梳理,在厘清手術機器人介入下醫療事故罪犯罪主體的基礎上,圍繞該情形下醫療事故罪中「嚴重不負責任」這一核心要件的認定困境及其完善對策展開探討。
二、必要前提:醫療事故中手術機器人「嚴重不負責任」主體地位之否定
有學者指出,在智能醫療技術環境下,醫療事故罪的責任主體可能涉及智能技術或智能機器人,導致責任歸屬變得模糊。因此,在手術機器人介入下適用醫療事故罪時,有必要先明確手術機器人是否具備刑事責任主體地位,即手術機器人能否成為醫療事故罪中「嚴重不負責任」的責任主體。而其中最關鍵的問題實為機器人的「奇異點」界分,即手術機器人是否具有「自由意誌」。
(一)
「奇異點」界分:手術機器人是否具有「自由意誌」
雷·庫茲韋爾首次將「奇異點」(singularity)引入人工智能領域,根據他對「奇異點」的闡釋,除了具有人類水平的智力,「奇異點」後的智能機器人還具有情商。有學者將其歸納為:奇異點是指人類所創造的人工智能在某個時刻達到甚至超越人類自身智識水平的現象,此後的人工智能將超越單純工具的範疇。該觀點闡述了在「奇異點」來臨後人工智能的地位變化,但並未闡明該變化的本質,即人工智能超越工具主義的存在而成為自主體的條件是什麽?在馬克思主義的視野下,自然人和社會人共同構成「現實的人」,而「現實的人」之所以能夠成為自主體,是因為自由意誌作為高階的功能「模組」存在,賦予了自主體在實踐中能動的因果作用力。黑格爾主張,犯罪行為本質上是行為人自由意誌的體現,若無自由意誌,犯罪行為無從談起,因而與刑罰相應的內容便不復存在。因此,欲完成向自主體地位的轉變並取得犯罪主體地位,除了具備與人一樣獨立解決問題的操作能力,人工智能體還應當具備「自由意誌」。雖然在論及人工智能的刑事主體地位時大多數學者也將「獨立意識和意誌」或者「自主意識」作為區分「強/弱人工智能」的標準進行討論,但鮮有學者綜合哲學、認知神經科學、電腦科學等學科視角對「自由意誌」與「意識」深入闡述。故本部份從交叉學科的角度對「意識」和「自由意誌」及二者關系進行梳理,並結合人工智能技術發展狀況進一步分析機器人具備「意識」的可能性。
1.意識的概念、起源與類別
目前,意識的定義在各學科如心理學、醫學和腦科學中尚無統一共識。在心靈哲學領域,哲學家們探討了意識的意向性問題、容易問題與困難問題、心-身問題和統一性問題等,並提出眾多哲學理論。(詳見表1)同時,科學家們基於大腦機制的研究提出了諸多意識科學理論。(詳見表2)
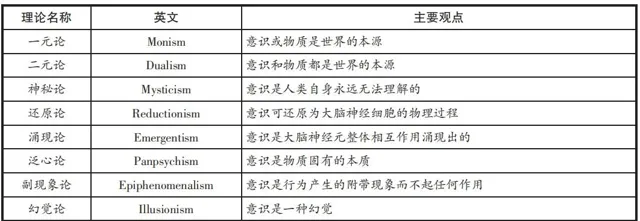
表1 意識的哲學理論

表2 意識的科學理論
哲學家chalmers將意識問題區分為「容易問題」和「困難問題」。「容易問題」指的是那些能夠歸結於物理過程,並透過腦科學的研究方法來探索的意識問題。這類問題通常涉及意識如何與腦的物理活動相聯系,包括感知、思維、行為控制和資訊處理等方面。困難問題則關註感受性(qualia),即探討大腦的物理活動是如何產生人類的內在且主觀的體驗或感覺,如感官體驗和情緒體驗等。盡管腦科學在研究意識方面已取得諸多成果,但它仍未能解答感受性問題,即大腦如何產生這些主觀體驗。周昌樂教授將意識歸納為三種基本類別:覺知意識(意向性),悟識意識(自明性)以及感受意識(主觀性)。其中悟識意識包含自我意識,是指心智對自身過去意識行為的省察、審視和評判等的反思性意識活動,並根據其有無向物件分屬容易問題和困難問題。
2.意識、欲望與自由意誌的關系
20世紀末以來的神經科學研究表明人們的某些選擇行為是神經運作的、未經意識參與決策的結果,形成了自由意誌危機論。而後許多學者在此基礎上對自由意誌進行了解釋,認為在被知覺到的原因和行為之間存在間隔,這個間隔就是自由意誌。哈利·法蘭克福的層序欲望理論提出,人類的意誌結構具有其獨特性,區別於動物。人類根據基本的喜好或欲求,形成做某事的「一階欲望」,這種欲望也存在於動物中,能直接驅動行動。然而,人類除了「一階欲望」,還形成了「二階欲望」和「二階意誌」。所謂的「二階欲望」是對「一階欲望」的欲求進行反思和延伸,例如一個人可能本能地想要喝酒(一階欲望),但經過反思後,可能產生戒酒的欲望(二階欲望),這就構成了他的「二階意誌」的內容和動力來源。拉康認為「人的欲望就是他者的欲望」,人的欲望是獲得他人之承認的欲望。這些理論實際上以人類本身同時具有覺知意識、感受意識、悟識意識(內省意識)為前提。欲望借由意識產生:透過覺知意識感知(非)本能需求、社會評價,透過感受意識體驗情緒、進行「移情」,並透過悟識意識進行自我代入與分析。故而,欲望是產生自由意誌的動力機制,理性是修正與達成欲望的手段,而意識的這種覆寫無意識心靈偏好設定行為的能力,則是自由意誌的基礎。(詳見圖1)
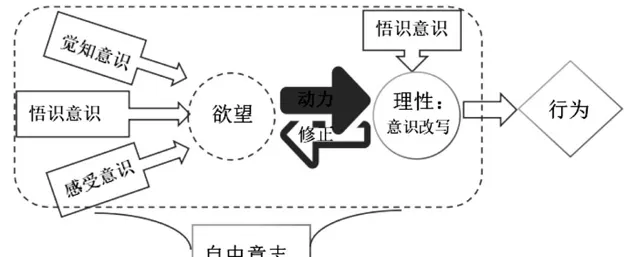
圖1 意識、欲望與自由意誌的關系圖解
3.手術機器人是否具有「意識」與「自由意誌」
與意識的容易問題與困難問題相對應,holland將機器意識分為弱機器意識和強機器意識。而弱機器意識的目標是根據人類意識機制建立起相關的模型,使機器具有感知、推理能力,能夠語言交流、辨識與表達情感等。強機器意識的目標是制造出具有與人一樣的意識能力的機器,包括自我意識、主觀體驗、自由意誌等。在機器意識研究中,感受意識由於具有主觀性,涉及無意向性心理活動,且無法以意向物件為載體進行形式化表征和計算,因而最具挑戰性。自我意識涵蓋自我體驗,涉及感受性問題,因此完全實作頗具難度。現階段,機器意識的計算實作(詳見表3)主要依賴於傳統人工智能技術,如符號計算和人工神經網絡。然而,這類基於預設編程的方法本質上難以實作機器意識。量子計算因其高計算能力和描述能力被認為有潛力突破現有限制,但成本高且無法完全解決意識問題,如意向性問題。此外,使用生物技術或腦機融合可能導致純粹機器意識否定爭議,並涉及倫理問題。

表3 機器意識的實作方法與實作可能性
根據手術機器人具有的人工智能層次,手術機器人的智能水平通常被劃分為六個等級:在第0級,手術機器人並不具備智能特性;第1級手術機器人能夠執行基礎的輔助性操作;第2級時,機器人能夠自動完成醫生明確指定的手術任務;第3級,手術機器人可以在醫生的規劃指導下,自動執行手術步驟;第4級手術機器人,在人工監督下,能夠實作全自動化手術操作並具備自主決策能力;第5級手術機器人則能夠在沒有人工幹預的情況下,完全自主地進行手術。總體來看,目前關於手術機器人的分類,主要側重於自動化程度的劃分,而對於機器意識程度的探討和細分則相對較少。本文依據機器的自動化程度和意識的發展程度將手術機器人分為非自主型(第0級、1級)、半自主型(第2級)、全自主無意識型(第3級)、全自主弱意識型(第4級)、全自主強意識型(第5級)手術機器人五類。當前,手術機器人系統的智能化程度還處於多數非自主型、少數半自主型的階段,尚未研發出有意識的手術機器人,全自主無意識型手術機器人目前亦仍處於實驗研究階段。
手術機器人能否具有「自由意誌」,取決於機器意識的發展程度。當手術機器人具備「強機器意識」時,即意識程度發展到足以產生自我意識與感受意識時,則達到具備情緒智力和形成欲望的條件,從而有產生自由意誌的可能。反之,則不具備真正意義上的「自由意誌」(具體分析見後文)。換言之,只有當手術機器人達到前述分類中的「全自主強意識型(第5級)」才可能具有「真實心靈」和「自由意誌」。
(二)
「奇異點」之前:手術機器人沒有責任能力與刑罰可罰性
辨認控制能力首先是犯罪主體的條件,也是刑事責任的承擔主體的條件。其中辨認能力是指認識自己特定行為的內容、社會意義與結果的能力,也稱認識能力,而控制能力是指支配自己實施或者不實施某種特定行為的能力。辨認能力是覺知意識、悟識意識與感受意識的綜合體現,而控制能力則是自由意誌的體現。在「自由意誌」的奇異點到來之前,手術機器人難以具有自主體地位,相應地,也不具有犯罪主體地位。
1.無意識型手術機器人不具備刑事主體地位
應當明確的是,在當前較長的一段時期內,手術機器人尚處於非完全自主且無意識階段。確切而言,目前手術機器人尚不能稱作醫療人工智能,僅為醫生輔助診療工具,屬於醫療器材的範疇。對於非自主型、半自主型、全自主無意識型手術機器人,僅在操作技能(operation/motor skills)上有所發展,而對認知技能(cognition skills)處於闕如狀態,不具有意識和自由意誌,僅能作為工具而無法成為犯罪主體。
2.全自主弱機器意識型手術機器人不具備刑事主體地位
有醫學專家預測機器人手術的未來是高度智能化,經由專門設計之程式,手術機器人能夠主動辨識疾病並自主擬定手術方案,經主要負責的醫生稽核後自動執行手術,在醫療認知與操作上均實作全自動化。也即前文所述的全自主弱意識型機器人:具備屬於覺知意識範疇的感知、認知及表達能力,但尚未具備認知意識與感受意識。而該類機器人也屬於學界對其主體地位爭論最廣泛的物件,本文對該類手術機器人的刑事主體地位持否認觀點。
其一,全自主弱意識型手術機器人成為犯罪主體缺乏妥當的哲理基礎。科學實證主義和道德二元論是學界中人工智能成為犯罪主體的主要哲理基礎,然二者均有落入結果主義陷阱、悖乎刑法的責任主義原則之嫌。責任主義的本質根據在於人的理性與自由意誌,但若沒有欲望,理性也就失去了價值,理性的主體必然同時也是欲望的主體。科學實證主義透過「法人類比說」認為刑法規制能減少人們對人工智能犯罪的恐懼,該觀點忽略了法人的決策和擔責實質上難離有自由意誌的自然人這一事實;而目的道德論亦應當以行為主體具有自由意誌為合理性前提。
有些學者以智能機器人的「電子眼」「電子耳」具有超越人類的感知能力和預測能力,以及超強的數據采集、分析能力與反應速度為由,認為該類人工智能已經具備辨認與控制能力,並以alphago基於深度學習技術超越研發者預測為由認為其具有獨立意識。該類觀點只關註到意識的「理性系統」,對「辨認和控制能力」與「獨立意識」僅在覺知意識範疇作功能性的片面理解,而未註意到該類人工智能「前意識的體驗系統」的缺失。申言之,在悟識意識與感受意識缺乏的情形下,該類人工智能難以形成自身欲望,其功能性意識始終為人類設定的目的服務,並不具有所謂的「自由意誌」,「辨認能力」因悟識意識與感受意識的缺失而不完整,「控制能力」因「欲望」的闕如而無法體現自由支配性。該類人工智能僅能依照「實在論進路」遵循道德控制的規則導向體系,獲得操作性的道德理性,其能力(自主性和倫理敏感性)仍然完全在工具設計者和使用者的控制範圍之內,難以借由「道德代理」獲得犯罪資質。
其二,全自主弱意識型手術機器人成為犯罪主體難以實作刑罰目的。從情感意識來看,其難以產生悔恨、痛苦、恐懼等感情,刑罰的威懾效果以及報復感情綏靖機能或者說報應機能難以發揮,被害人及其家屬、社會一般的報復感情觀得以和緩並滿足,實則偏離刑法懲罰犯罪和保障人權的根本目的。有學者提出重構刑法體系,透過對智能機器人的編程進行調整來對其進行類人的定罪處罰,例如刪除數據、修改編程、永久銷毀。但是該方案實則難以實作刑法的,從悟識意識來看,其無法進行自我反思和作自由決定,刑罰的再社會化功能難以實作,即便修改程式也僅具有針對特定規範的特殊性,無法透過發揮其主觀能動性主動避免再次犯罪,難以實作預防目的。
其三,全自主弱意識型手術機器人並無成為保安措施主體的必要。該類人工智能似與完全喪失清醒意識意識的精神病患者有相似之處,都具有一定的行為能力,正常心智的人類與其相處時都可能基於「錨定效應」而認為對方亦有完備的意識,實則不然。現代刑法不譴責精神病人等不能辨認或控制自己行為的人,但有學者認為,未來刑法是以保安目的為主的預防刑法,物件可以納入不具有自主意識的行為主體,包括沒有辨認和控制能力的精神病人與沒有完全自主意識的人工智能。本文認為,不具有自主意識的人工智能難以成為與精神病患者等同的保安處罰主體。首先,由於不具有自由意誌,該類機器人與人類始終處於服從與命令的關系,在交往中難以實作平等尊重;而精神病人與一般人並不存在服從關系,仍具有主體尊嚴。其次,不具有感受意識的全自主弱機器意識型人工智能並不具有真正的「情商」,也難以透過「關系論進路」在與人類互動中形成道德倫理。從社會連結來看,該類機器人難以透過情感意識連結社會他人情感,而作為主體的人的本質是一切社會關系的總和,當機器人缺失社會內容,機器人被作何種處置並無其他社會主體在情感層面真實在意,完全可以交由技術管理規範或者前置法來進行調整,尚無動用具有最後手段性之刑罰的必要。
(三)
「奇異點」之後:手術機器人刑法規制可能性之質疑
全自主強機器意識型手術機器人具有完備的覺知意識、悟識意識與感受意識,具有情感、欲望、自由意誌,能夠與社會連結,理論上能夠成為自主體。但其能否突破刑法的人類中心主義、成為刑事主體卻是值得質疑的。
首先,賦予全自主強機器意識型手術機器人刑事主體地位將產生二律背反現象:制造具有自由意誌的機器人不符合人工智能「以人為本」的設計目的與法律定位需要,而不具有獨立於人類的平等利益的機器人不具有法律評價的平等性前提,難以具備犯罪資質。換言之,當智能機器人具備自由意誌而獲得犯罪主體地位之時,也將突破人工智能的設計目的與法律定位,追求獨立於人類的平等利益,從而對人類的中心主義產生沖擊與威脅。
其次,人類難以承受賦予該類機器人犯罪主體地位的後果:承認平等性、喪失支配地位。承認人工智能的主體性,將其與人類置於等同的法律地位,實質上意味著人類與人工智能應當各自獨立、互不幹涉。這從根本上要求人類放棄對人工智能的掌控權。從刑罰實施的正當性來看,對該類人工智能透過人類強制幹預施加「修改程式」的刑罰措施,實質上是類似於「基因編輯」「化學閹割」等侵犯主體尊嚴的措施,並不具有當然的正當性。此外,一旦人類失去對人工智能的控制,人工智能可能會毫無限制地進行自我最佳化、自我生產和自我復制。彼時,無論是體力還是智力,該類人工智能都將勝過人類,在失去絕對權威的情形下,基於資源掠奪的自然規律,人類必然會在資源逐漸受到擠兌的情形下走向式微。面對此類狀況,即便人類采取應對措施,屆時人工智能在刑法體系中的定位亦將失去其實際意義。
應當認為,在「自由意誌」的奇異點之前,手術機器人不具有成為自主體的充分條件,不具備刑事主體地位;在具備強機器意識的奇異點之後,賦予手術機器人與人類平等的犯罪主體地位將導致破除人類中心主義的倫理危機。在人類社會話語體系中,在刑法上手術機器人只能處於客體地位,是被利用、保護和管理的物件,若未來全自主強機器意識型機器人真的實作,或特許以考慮構建與刑法並列的、賦予該類機器人有限主體地位且受控於人類的制約管理規則。
三、現實考量:手術機器人介入下醫務人員「嚴重不負責任」認定的依據困境
面對技術與醫療風險,簡單地將手術機器人本身視為刑事責任承擔者難以證立,需轉而規制自然人主體的研發、生產和使用行為,重點是規制醫務人員的使用行為。作為過失犯罪,醫療事故罪的核心要件之一是「嚴重不負責任」。關於該要件的認定,在司法實踐與學理層面存在爭議,而手術機器人的套用帶來了新的問題:由於手術機器人醫療行為具有區別於傳統醫療行為的數據化、自主性和風險復雜性等特征,醫務人員無法完全依據既有經驗和所掌握的知識達到傳統人類醫療狀態下的註意水平。無論在主觀上的認知水平與結果預見能力,還是客觀上的行為標準註意能力和結果避免能力,均受到一定程度的影響。
(一)
客觀標準的滯後性:行為基準不確定性加強
根據民法典,判斷醫務人員過失實行行為應當以「當時的醫療水平」為客觀參照標準。在適用醫療事故罪方面,註意義務的標準通常指臨床診療規範中當時的醫療水平。日本學者松倉豐治對醫療水準進行了分類,將其劃分為「學術上的醫療水準」和「實踐上的醫療水準」。前者尚未在實踐中廣泛套用,因此不能作為判斷註意義務的標準。然而,隨著醫學的不斷發展,學術上的醫療水準有可能逐漸演變為實踐上的醫療水準。換句話說,學術上的醫學水準指的是「未來普遍化的目標下的重要基礎研究水準」,而實踐上的醫療水準則是指「當前實施目標下的一般普遍化醫療水準」。目前,大多數學者認為應當采用「實踐上的醫療水準」。但是,在手術機器人技術尚未完全成熟和普及的階段,當前其發展僅能影響學術上的醫療水準,而尚不足以改變實踐中的醫療水準。盡管中國已經頒布了【人工智能輔助診斷技術管理規範】,但該規範內容較為寬泛概括,且規範物件不含具有人工智能的嵌入式臨床診斷與治療儀器器材,相關規範仍需進一步細化和完善。因此,在手術機器人介入下的醫療事故罪認定中,臨床診療規範上「實踐上的醫療水準」可能因手術機器人未「一般普遍化」、尚未納入相關一般標準而失靈。
一方面,醫務人員在手術機器人介入下醫務人員的部份註意義務減弱。在遵循相關法律法規、診療規範及醫療習慣的基礎上,手術實施階段中,主刀醫生的註意義務主要涵蓋準備義務、核查義務、操作義務、請示與告知義務等方面。在手術機器人介入的醫療場景中,醫生的註意義務確實發生了變化,尤其在操作義務方面,醫生的工作方式與傳統方法存在較大區別。以達芬奇手術機器人為例,醫生不再直接手持手術刀等傳統器具,而是透過操縱控制桿來進行精確的操作。此外,交流方式也發生了變化,醫生與助手、護士的溝通交流不再透過傳統的直接對話方式,而是主要透過影片與音訊等。此類註意義務的減弱可以適當解放醫務人員的「肢體」勞動,賦予他們更多精力關註醫療方案等核心環節,因此,相應的醫療規範也具有調整的必要性。
另一方面,在手術機器人介入下醫務人員增加了對於機器人本身的註意義務。手術機器人套用場景中,醫務人員註意義務的指涉物件不僅局限於患者、手術行為等通常範圍,還包括了手術機器人本身,例如對於手術機器人的檢查、監督義務等。由於手術機器人的非主體性,該註意義務難以透過信賴原則直接豁免。而當前手術機器人執行的核心技術基礎是大數據與深度學習,其基於演算法實施的醫療行為具有更高的不確定性和風險性。因此,普通醫療器材的臨床診療規範對於手術機器人醫療水平的評估與註意程度的規範不具可參照性。此外,盡管手術機器人的學習原理與臨床醫生存在相似之處,但在診斷方法上前者采用的分析、歸納手段與後者采用的直觀、演繹方式存在邏輯上的本質差異。因此,臨床醫生的診療標準對於手術機器人醫療水平的評估亦無參照價值,因而無法簡單依據「實踐上的醫療水準」認定醫務人員在套用手術機器人醫療時是否具有過失實行行為。
(二)
主觀標準的差異性:結果預見能力差異性增大
關於醫生在主觀上結果預見可能性的認定標準,醫事刑法理論上存在兩種觀點:合理的醫師標準和理性的醫師標準。前者也被稱為醫療常規標準,「以一般的醫師在當時所知悉的醫療的‘一般水準’作為基準」;後者即「最佳判斷標準」,指醫生在作出關於特定病例的決策時,所依據的應當是一個理性且適格的醫生所具備的最佳判斷。當遵循醫療常規標準不足以規避醫療風險時,醫生應當善用其最佳判斷進行醫療決策。由於手術機器人具有高度的技術精密性和專業性,加之各地區發展水平、醫生個人能力和經驗的差異性影響,在手術機器人介入的醫療活動中醫生對於醫療事故的結果預見能力差異增強,「一般水準」的形成難度增大、可參考性降低。
一方面,手術機器人的演算法「黑箱」影響醫生的預見能力。在傳統醫療事故中,由於手術過程視覺化和可觀察性,醫用器材的缺陷或者醫生的醫療行為與危害後果之間的因果關系往往較易發現和證明。然而,當前手術機器人的執行遵循程式和演算法,可視環節僅限於指令輸入和結果輸出兩端,而執行過程則屬於難以知曉的「隱層」,亦即「黑箱」現象。醫務人員在手術機器人的套用過程中伴隨著醫療認知風險的「技術屏障」。而醫務人員對於醫療人工智能器材的物理演算法特性知識掌握並不深入,要求醫務人員對器材故障概率及其後果具有超出專業能力範圍的預見可能性並不現實。同時,醫療器材設施的安全標準嚴格,醫務人員普遍認為其可靠性得到充分保障。因此,在手術機器人套用場景下,醫生對診療結果的預見能力被客觀削弱。另一方面,手術機器人普及程度影響醫生的認知水平。中國疆域廣袤,各地區經濟發展不平衡,這從根本上決定了各地的醫療技術水平差異。在經濟發展相對落後的地區,醫療器械較不先進,手術機器人的推廣和使用受到制約。此外,這些地區的醫療人工智能技術和相關最新知識的普及程度也較低。由於醫務人員缺乏足夠的培訓和實踐機會,他們對於手術機器人運用場景下出現機器卡頓、失靈等情形如何采取最優方案介入監督和接管的水平可能受限。同時,在同一個地區的醫生之間其醫療人工智能輔助診療經歷和相應能力也千差萬別,在面對手術機器人介入診療時,主刀醫生對於手術機器人診療過失的結果預見能力由於經驗差異而不盡相同。該情況下,醫生在運用手術機器人輔助醫療時,「最佳判斷標準」本身的認定或許就不具備客觀參照。但是,鑒於手術機器人屬於高尖技術,伴隨著難以預料、不確定極強的科技風險,對使用手術機器人進行醫療的醫生而言,科以較高的預見義務又具有其必要性和合理性。在此種沖突下,有必要進一步探討手術機器人介入下主刀醫生過失的認定標準。
四、應對進路:手術機器人介入下醫療事故罪「嚴重不負責任」認定的完善方法
手術機器人介入情境下醫療事故罪認定的邏輯起點是責任主體的明確,在此基礎上,應綜合考量手術機器人套用場景下醫務人員的結果預見能力與客觀醫療水平差異,結合修正的舊過失論與新過失論的各自理論優勢,在不同的技術與規範發展階段,對「嚴重不負責任」的認定采用不同的過失犯理論路徑,並完善配套措施。
(一)
明確醫療事故責任主體
手術機器人運用場景中發生醫療事故造成患者嚴重傷亡的情形下,厘清刑事責任主體是醫療事故罪判定推演的起點。如前文所述,在「奇異點」來臨之前,手術機器人難以真正具備完備的意識與「自由意誌」,無法成為醫療事故罪的責任主體。在手術機器人介入情境下的醫療事故罪認定,主體仍應落在人類社會生存狀態下的相應的自然人。具體而言,司法實踐中,中國刑法第三百三十五條對醫療事故罪所規定的犯罪主體——醫務人員,專指那些直接參與診療和護理工作的醫學專業人士。構成此罪的醫務人員必須滿足以下兩個法定條件:取得相關執業資格證書;必須進行註冊。從手術機器人操作失誤導致醫療事故的場景而言,該「行醫個體」應指對於機器人套用場景下該場治療活動的主要負責醫生,也即對手術機器人具有操控資格和監督義務的主刀醫生。同時,在因其他醫務人員的過失行為導致手術機器人操作未按既定程式進行時,該其他醫務人員也能成為醫療事故罪的主體。
倘若「奇異點」能夠到來,屆時手術機器人具備強大的機器意識和獨立自由意誌,從而具有成為犯罪主體的可能性。我們不得不承認,具有完善意識、卓越認知和技術水平的全自主強機器意識型手術機器人,對醫療水平的提升具有顯著優勢。即便如此,筆者仍然堅持維護刑法的人類中心主義立場,認為人類對於該類手術機器人的管控權應當把握在前端——研發生產階段。根據馬斯洛的需要層次論,人類有生理需求、安全需求、愛和歸屬感、尊重和自我實作五類需求或欲望。擁有對世界較大自由掌控程度的情形下,人類文明在需要與理性的搏鬥中誕生和延續。如若既想利用該類人工智能的強大功能,又想維護人類中心主義,或許只能考慮透過控制人工智能的核心需要來源,例如電源動力等,並透過技術規範、專門法規等賦予其有限的行動自由,遏制其形成群體優勢,來實作不完全平等的共存局面。當然,這可能涉及奴隸社會歷史演變相關的倫理爭議,在此不作討論。
對於未來可能出現的全自主弱機器意識型、全自主強機器意識型手術機器人參與下的醫療事故責任分配,本文贊成風險自負論。鑒於此類人工智能在認知和操作水平方面均相當甚至優於普通醫生,在患者知情同意的前提下,采用手術機器人所帶來的風險與信任普通醫生進行治療的潛在風險並無實質性差異。若要避免因無法控制的風險而全面禁止智能代理,唯有依賴「社會」共同承擔那些無法透過編程及負責任使用方式予以掌控的風險,即放棄對過失行為的刑事責任追究,將遭受損失的人群視為「非人類行為的受害者」。此舉並非要求普遍性地免除智能代理背後人員的責任,而是在確保智能代理的一般社會效益符合法律法規的前提下,使公眾能夠接受其所帶來的風險,從而避免刑法的幹預。
(二)
調整「嚴重不負責任」認定標準
學理上,中國刑法學界對「嚴重不負責任」的定義從四要件犯罪構成體系的角度出發產生了三種主要類別的學說流派,即主觀要件說、客觀要件說和主客觀綜合要件說,這實質上是過失實行行為的否定論與肯定論之爭,總體而言肯定論中的主客觀綜合要件說占據主流地位。而從階層犯罪體系的角度出發,肯定論陣營還依據過失要素分屬的不同階層發展出了不同的過失犯理論:舊過失論、新過失論、修正的舊過失論以及超新過失論。其中,修正的舊過失論(基於結果無價值論)與新過失論(基於行為無價值論)在學術上形成了一定的抗衡態勢。對於醫療事故罪判定中的核心問題「嚴重不負責任」之認定,本文贊成「主客觀綜合要件說」,持過失實行行為肯定論。但對於肯定論中的過失犯理論爭議,在手術機器人介入情境下,應針對具體發展階段作出相應傾向。
1.過渡階段:修正的舊過失論之合理性
當前手術機器人發展尚未足夠成熟,在醫務人員違反對於手術機器人的註意義務造成醫療事故時,對於過失犯認定可以暫時依據修正的舊過失論。
修正的舊過失論與新過失論同屬於二階段考察模式:在構成要件階段,考察行為是否偏離規範或者是否存在不被允許的危險;在責任階段,考察行為人是否具備預見可能性。修正的舊過失論主張,過失行為本質上表現為一種能夠引發不利結果的「實質不被允許的危險」。在采取了足以降低危險性的措施時,由於實質危險性較小,可以否定實行行為性。反之,在具有實質危險性的行為導致危險現實化並產生結果的情況下,滿足過失犯的客觀成立要件。
從客觀層面的認定標準上看,在手術機器人參與醫療活動仍未全面普及的階段,臨床診療規範尚未包括手術機器人的相關具體規定,「實踐上的診療水準」不足以支撐醫務人員客觀註意義務的認定。由於對實行行為作「實質危險性」評價,修正的舊過失論不需要提前設定行為基準,在「客觀行為基準」難以類別化明示的情形下,對過失實行行為采用舊過失論中的「實質性認定」具有較強的可行性與合理性。從主觀層面的認定標準上看,相較於新過失論在第一考察階段(結果避免義務的判定)以「一般人的預見可能性」為基準,修正的舊過失論采用的實質性認定並不強調必須以一般人為基準,有學者認為應當著眼於行為發生時行為人在規範上應答能力,全面考察可能影響該能力的所有事實。如前文所述,手術機器人介入下醫務人員的結果預見可能性差異加強,導致「一般人的預見可能性」標準難以確立。而這一情形恰與修正的舊過失論相適配。
手術機器人介入情形下醫務人員的主觀過失判定可采用合理醫師標準和最佳判斷標準結合之方式。人機協作環境下的醫療過失預見可能性認定標準主要受到醫療系統先進性的影響。對於遵循標準化程式並直接執行特定環節醫療操作的非自主型手術機器人,醫務人員只要符合操作規程及傳統合理醫師標準,則應視為已充分履行註意義務。對於伴隨高度風險的自主型手術機器人的套用,僅要求醫務人員達到合理的醫師標準是不夠的。一方面,這可能會導致醫務人員過於謹慎,不敢偏離常規,即使對患者和社會的健康福利有益。另一方面,該類手術機器人介入下的醫療活動具有技術不確定性帶來的醫療風險,如果醫務人員在此類手術機器人使用過程中未盡到最佳理性人標準,造成危害結果實則具有高度可預見性。因此,在此種情形下使用最佳理性人標準是合適的。要求醫務人員在手術機器人的套用、檢驗、監督等環節中,根據具體案例善用最佳判斷作出有利於患者的審慎醫療決策。在評估是否達到「最優決策標準」時,應充分考慮個案差異,綜合考量當時當地的醫療條件、醫院分級、醫師分科以及醫生執行業務之裁量性等因素。當然,患者同意該治療方案往往是在別無他法或者兩害相權之下出於對康復的期待而作出的選擇,當臨床共識等規範尚未形成,為了醫學技術的發展,法律應當對醫生的「最佳判斷」決策風險采取適當包容的態度,在醫生無其他過錯時,手術風險由患者自負。
2.成熟階段:新過失論之優越性
為了克服「舊過失論」出現的結果責任傾向,新過失論依據「被允許的風險」與「信賴原則」理論,提出過失的判定不應依賴於心理過失的定義,而應依據是否遵循了外部結果預防措施的基準。新過失論並未忽略行為人在責任階段的結果預見義務,而是在此基礎上,進一步強調在不法階段中行為人應履行一般人應盡的結果避免義務。對於違法性因素的客觀行為評價,新過失論以事前設定行為標準的方式,呈現出更為明確具體的特征。相較之下,修正的過失論則依賴事後評價,其評判標準相對較為抽象和模糊。何種理論在醫生實質性治病救人決策中更具優勢仍存爭議。在未來,隨著醫療人工智能技術的發展成熟和普及,相應法律規章、診療規範、醫療習慣等逐漸完善,對於手術機器人介入下醫生「嚴重不負責任」的認定采用新過失論具有顯著優勢。
從心理學角度分析,評判標準的不確定性可能引發不同醫生之間在模糊容忍度和認知靈活性方面的差異表現。在決策制定過程中,具有較高模糊容忍度和較強認知靈活性的醫生,受客觀標準模糊性的影響較小,甚至可能因此作出偏離常規但實質上對患者有利的醫療決策。反之,模糊容忍度較低或認知靈活性較差的醫生在面對不確定的客觀行為標準時,可能承受更大的壓力而趨於保守,甚至避免使用手術機器人。因此,對於修正的舊過失論中的客觀實質性認定標準,個人能力不同的醫生可能發展出不同的結果預見和避免能力。然而,法治從來就不追求最優、最善的制度,而是超越個人立場的最不差、惡性最小的制度。因此,設定明確的規則,即新過失論中的「基準行為」,在整體上而言更有利於控制風險。
從「寬嚴相濟」的基本刑事政策分析,對於犯罪的處理應當依據具體情形做到「有寬有嚴、寬嚴適度」。醫療事故罪屬於中國刑法體系中的輕罪範疇,其所涉及的行為往往呈現出相對較低的主觀惡意和社會危害性。因此,在司法認定時,我們需特別強調「寬嚴相濟」刑事政策中的「從寬」取向,以體現法律的公正與人性關懷。然而,盡管醫療事故罪在刑事司法實踐中不常出現,但其刑事制裁的邊界仍與積極刑罰的整體趨勢保持一致。在風險社會背景下,手術機器人等醫療人工智能的套用導致醫療風險劇增。在醫務人員承擔高度職業風險的情況下,醫療事故罪犯罪圈的擴大無疑加劇了醫療行業的「寒蟬效應」,並間接導致防禦性醫療的泛濫,這不僅不利於患者利益保障,更可能加劇醫患信任危機。新過失論強調,為防止社會陷入停滯,有必要允許一定範圍內的危險行為。這些危險行為,盡管存在侵害法益的可能性,但鑒於其對社會有益且不可或缺,在特定範圍內,仍需承認其合法性。因此,在手術機器人技術成熟且相關行為規則完善階段,適用「新過失論」、透過基準行為的設立能夠提前明確結果回避義務,有助於提高醫療事故罪入罪門檻,有效限縮醫療過失犯罪的擴張,在保護患者人身權益的同時,防止醫務人員和科研人員對於醫療人工智能的使用與研發畏縮不前。
(三)
完善「手術機器人介入醫療」的配套制度
在手術機器人技術逐漸成熟的「過渡階段」,有必要及時制定相應的規定和措施,以促進「實踐醫療水平」的完善,並為其提供合法性指引。
首先,建立手術機器人高安全標準的準入機制,嚴格把控手術機器人研發、生產和投入使用時的可控性、有益性標準。全自主弱機器意識及以下類別的手術機器人作為高風險人工智能產品,應劃入歐盟人工智能法案的高風險類別,該法案將其歸為「基本的私人和公共服務」範疇。針對此類高風險人工智能,法案規定了從市場準入前至市場準入後的全流程風險管理措施,這無疑具有借鑒意義。關於全自主強機器意識型手術機器人,其技術可行性本身存有爭議。人工智能過於強大的擔憂在短期內乃至數百年內皆為誤解。此類擔憂源於對問題的局部視角,相較於構建具有自我意誌的智能機器人的龐大工程和復雜程度,人工智能各領域近期的突破實屬九牛一毛。因此,對於具有自由意誌的手術機器人的開發,目前實際上並無法律強制幹預的必要。進一步而言,正如前文所述,倘若「奇異點」真的到來,可以在研發制造前端采用電源控制等維護人類中心主義的技術措施。
其次,針對各類手術機器人輔助醫療活動場景,制定醫務人員分級註意制度。手術機器人的套用並不改變醫療領域的高度專業性和醫師行為的親身性特征,因此,應分級完善醫務人員的註意義務。對於非自主型手術機器人,醫生具有完全的操作可控性,與使用傳統手術器具具有本質上並無差異,因此註意義務並未降低。僅在操作義務方面存在輕微的差異,即醫生不再需要親自使用手術刀等傳統器具。對於半自主型、全自主無意識型和全自主弱機器意識型手術機器人,醫生雖未親自參與操作,但具有隨時接管的可能性,可能減弱的只有操作義務:半自主型手術機器人能獨立完成大部份的手術操作,醫生的操作任務大幅降低,而在全自主無意識型和全自主弱機器意識型手術機器人套用場景下,醫生則無需進行任何手術操作工作,因此無需負擔手術操作義務。然而,醫務人員的準備義務、核查義務、請示與告知義務註意程度不僅沒有降低,還因為人工智能的高度技術性在程度和內容上進一步負擔註意義務。例如參與手術機器人介入醫療活動的醫務人員負有接受手術前培訓了解操作規範的準備義務;同時對於手術機器人器材及其操作負有更為仔細地核查與認真監督的義務;對患者具有更全面細致的告知溝通義務等。具體而言,醫務人員在醫療實踐中,應確保對機器人的持續控制,並對醫療活動進行實質性審查與監督。面對系統故障或錯誤,事前謹慎預防、事後及時補救,作好隨時接管的準備。在面臨疑難病癥或手術機器人提出的可疑醫療方案時,務必親自進行比對查驗並組織會診。在手術過程中,需全程監控並及時遏制潛在風險和糾正異常操作。對於半自主型和全自主無意識型手術機器人還負有規劃義務,即對手術機器人的具體操作方式或者執行軌跡進行規劃。對於患者或其家屬應在術前充分告知手術機器人的醫療水平、運作風險和替代方案等,並取得明確同意。
最後,加快醫療人工智能領域技術規範以及前置性法律法規的修訂與完善,為手術機器人介入情境下醫務人員醫療事故罪中「嚴重不負責任」的認定提供「實踐上的醫療水準」參照依據。同時,在具有手術機器人套用客觀條件的地區加強對於醫務人員的人工智能技術講解和行為規範培訓,逐漸在醫療行業形成新的醫療慣例和準則。此外,當法律規範滯後,可以歸納該類醫療事故糾紛的過失實行行為類別、危害結果、因果關聯性等,結合類案裁判解釋和社會實際發展情況,對該類醫療事故責任認定標準作司法解釋,指導司法的同時為醫療行業指引合法性方向。
結語
手術機器人能否成為犯罪主體的實質「奇異點」界分依據是能否透過完備的覺知意識、悟識意識、感受意識產生欲望、形成自由意誌。「奇異點」前現有的無意識型手術機器人仍屬於醫療活動中醫務人員的輔助工具,而全自主弱機器意識型雖具有主體外觀,但無實質主體資質,應當將其視為客體而否定其刑事責任主體地位;構想中「奇異點」後的全自主強機器意識型手術機器人雖具有「自由意誌」,但為了維護人類中心主義,賦予其與人類平等的犯罪主體地位難具妥當性,應在研發制造前端透過技術規範、使用後端透過前置性法律法規進行管控。
醫療事故罪的認定在理論和實踐上本就存有爭議,而在套用手術機器人的過程中,醫務人員的客觀行為基準不確定性與結果預見能力差異性增強。在厘清醫療事故罪的犯罪主體的基礎上,對於手術機器人介入情境下醫療事故罪「嚴重不負責任」的判定應當循序漸進、分階段采用不同的過失犯理論和制度。具體而言,在手術機器人尚未成熟與普及、相應醫療規範尚未跟進的「過渡期」,可以采用主張對過失實行行為「實質性認定」的「修正的舊過失論」,其結果預見能力判定應采取「合理醫師標準」和「最佳判斷標準」結合之方式;而在未來仍應加快制定相應配套制度,建立不同類別手術機器人輔助醫療活動場景下醫務人員的分級註意制度;跟進醫療法律法規規章等規範檔的修訂,並形成新的醫療習慣,構建手術機器人套用生態下的「實踐醫療水準」客觀參照體系。在此基礎上,形成手術機器人介入醫療活動中醫務人員的「行為基準」,認定「嚴重不負責任」時采用以結果避免義務為核心的「新過失論」,對該要件作限縮解釋,以此保護患者人身權益的同時,並兼顧醫務人員的職業信心和醫療科技的創新發展。

往期精彩回顧
張琦|環境法典編纂契機下的生態環境損害救濟條款設計
耿婷|美國臨時禁令的「滑動尺度原則」判斷標準
施麗婷|人格權禁令裁判規則修正
汪思敏 趙肖斌|金融外商投資安全審查限度問題研究
吳熙辰|新型「網絡海盜」的安全風險及其法律規制
金以豪|民營企業產權的刑法保護向度——以職務侵占罪為視角

上海市法學會官網
http://www.sls.org.cn

上觀號作者:上海市法學會











