氣動人工肌肉(PAM)是一種既柔軟又靈活的線性氣動執行器,能產生像人體肌肉那樣的驅動。這種肌肉執行器能適應各種各樣的機器人平台和醫療套用。雖說有好多可能的驅動方案,可還是得研發出一種重量特輕、特別緊湊、特別靈活,還具有高功率重量比的軟驅動裝置。
【氣動人工肌肉】
當下,機器人系統的發展愈發常見,可能的套用有跟人類一同工作的個人或者移動機器人,還有用於恢復或者提升人類能力的外骨骼。因為具有靈活性和柔軟性,氣動人工肌肉(PAM)在過去的 30 年裏,已經成為了市場上其他可用執行器當中一種可能的執行策略。
人工肌肉執行器這個領域跨學科程度很高,把機械工程、材料科學、電氣工程、生物學還有物理學領域的好多研究人員都吸引來了。PAM 屬於那種簡單的機械執行器,是由彈性囊在編織網套裏構成的,還帶著兩個端部配件,用來把肌肉的兩頭給封住。
氣囊被空氣加壓後,致動器不是收縮就是軸向延伸,這得看編織套管纖維的方向。收縮性的 PAM 能產生比拉伸性 PAM 更大的力,還不容易屈曲。所以,收縮式 PAM 用得更多,也被叫做收縮執行器。
PAM 操作所依據的物理原理和人體肌肉是一樣的,原因在於它能把氣動功率變成拉力。在人造肌肉裏,空氣的可壓縮性有著難以預測的重要影響。就像圖 1 展示的那樣,依照不同的工作原理、套用還有設計理念,各種各樣的傳統 PAM 被開發了出來。
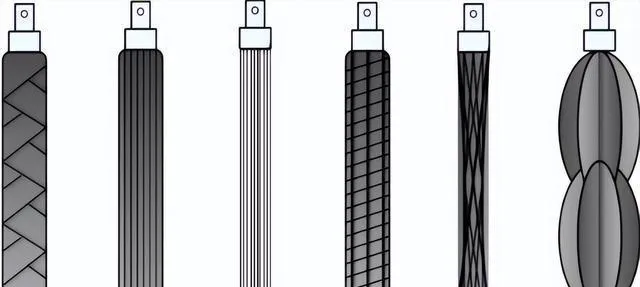
圖 1 展示的是 PAM 的類別
氣動人工肌肉(PAM)屬於靠氣壓來操作,能收縮以及進行線性運動的執行器。大多數這種執行器主要有兩個部份,就是柔性芯以及增強的封閉膜,像外殼和隔膜。這些肌肉執行器的兩頭都被端部配件(閉合件、夾具)給封閉住了。
核心膜會因為氣壓的供應向外凸出來或者被擠壓,然後靠核心膜把機械動力傳給負載。由於會徑向膨脹或者收縮,鐵芯軸向收縮就對負載產生拉力。所以,PAM 致動器達成的力(像張力、負載這些)和運動是線性的,也是單向的。
得搞明白肌肉執行器的基本概念還有工作原理。這種一膨脹就延伸的收縮操作,能把這些執行器跟波紋管區分開。PAM 在文獻裏有不少叫法:氣動肌肉執行器、流體執行器、流體驅動張力執行器、軸向收縮執行器以及張力執行器。
PAM 最基本的能量主要來自於空氣,要麽把空氣壓進去,要麽從裏面抽取。這樣就在肌肉內部的空氣和周圍環境之間形成了壓力差,憑借這個壓力差就能啟動 PAM 來得到想要的運動。跟低壓相比,超壓能傳遞更多能量。大多數 PAM 都是在超壓下運作的,環境壓力大概是 100kPa,不過也能設計出負壓操作的肌肉。
所以,把壓縮空氣提供給肌肉,就能得到移動負載需要的動作,反過來也是一樣,透過把氣壓釋放掉。
【氣動人工肌肉分類】
編織肌是由氣密的彈性管或者氣囊構成的,周邊圍著編織網(編織、編織、滑架),就像圖 2 展示的那樣。編織纖維按照一定的角度(螺距角、編織角、編織角)圍繞著肌肉的長軸呈螺旋狀延展。管子被橫向壓在套管上,由於纖維的曲率,管子內部的內部壓力被編織纖維的張力給限制住了。
纖維張力被加進編織物的端點來平衡外部負載。所以,管和套管之間的擠壓式接觸對提升負載很必要,而且編織肌肉無法在負壓環境下工作。
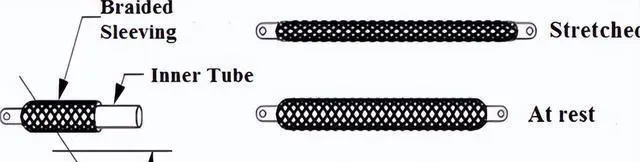
圖 2 有關編織肌肉以及它的工作情況
褶皺肌肉執行器是由 Daerden 和 Lefeber 弄出來的,就像圖 3 展示的那樣。這類肌肉充氣的時候,材料應變和摩擦都不摻和進來。這是因為有肌肉膜,這膜在軸向方向上有好多褶皺,是透過把褶皺展開來膨脹的。
另外,平行方向(跟軸垂直)的膜應力一直處在小得能忽略不計的數值,而且會隨著折疊次數的增多而變小。
大體上來說,讓膜膨脹不需要外部能量,而且因為沒有摩擦,滯後現象也沒被觀察到。這種肌肉的特性取決於全長和最小直徑的比例、膜材料的應變情況、收縮率以及施加的壓力。
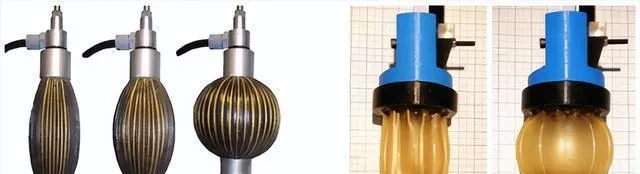
圖 3 是褶皺肌肉執行器
編織肌肉與網狀肌肉的關鍵區別在於膜周邊網格的密度,這裏面有著相對較大孔的網格屬於編織物,並且編織得很緊密。
所以,這種膜是拉伸類的,肌肉只能承受低的壓力。所以,這類肌肉致動器往往會有個重新排列的隔膜。圖 4a 展示了 JMYarlott 的 Yarlott 肌肉,它包含著由一連串繩索或者股線構成的長球形彈性囊。
這致動器膨脹起來是球形囊的樣子,一伸長,軸向線就變直,把囊給推成了帶有一連串脊和谷的形狀。圖 4b 展現出了另一種類別的網狀肌肉,叫機器人肌肉執行器(ROMAC),是由 G.Immega 和 M.Kukolj 在 1986 年設計的。
ROMAC 是由一個鉸接的多葉囊構成的,這個囊被金屬絲網固定著,兩端是由配件封住的,囊是用護套做的,具有高拉伸剛度、柔韌性和液密性的特點。網或者安全帶是由不可拉伸的柔性張力連線件組成的,這些連線件在節點處相連,從而在網絡裏形成四邊菱形的孔。
圖 4c 展現出了 M.Kukolj 的 Kukolj 肌肉,這是標準 McKibben 肌肉的改進版。這種肌肉的關鍵差別在袖子這兒,McKibben 肌肉是緊密編織的辮子,而 Kukolj 的設計采用的是開放式網狀網。在沒有鉛的狀況下,網跟膜之間存在著空隙,只有在相當高的延伸負載時這個空隙才會不見。

圖 4 呈現的是網狀肌肉
在嵌入式的肌肉裏,執行器的承載架構被嵌入到它的膜當中。AHMorin 的 Morin 肌肉是由橡膠管和嵌入其中的高拉伸剛度螺紋構成的。螺紋能夠沿著致動器的長軸進行排列,或者圍繞這個軸排列成雙螺旋,而且能采用像棉、人造絲、石棉或者鋼這樣的纖維材料。
從操作壓力的工作來看,在圖 5 裏呈現了莫林肌的三種設計,像縱向截面展示的超壓設計、負壓設計以及同心膜設計。HABaldwin 的 Baldwin 肌肉,是依照莫林肌的設計來的,它由彈性膜構成,這彈性膜是特別薄的外科橡膠,還有玻璃絲沿軸向嵌在裏面。
K. Nazarczuk 在 1964 年於華沙理工學院搞出來的負壓人工肌肉(UPAM),和 Morin 肌肉的設計挺像的。當氣體從膜裏被吸出去的時候,它不是軸對稱地塌下去,意思就是,它在中間被擠壓變扁了。

圖 5 嵌入到肌肉裏
Paynter 針織肌肉是由 HMPaynter 開發的,它有彈性材料做成的球形囊,還靠堅固、堅韌又柔韌的纖維編織結構來加強。完全膨脹的時候,這肌肉就呈現出原始膀胱和編織球體的樣子。圖 5 展示的是 Paynter 雙曲面肌肉,這是 HMPaynter 所描述的另一種設計。
肌肉的彈性膜是用氯丁橡膠或者聚氨酯做的,完全伸展開的時候是旋轉雙曲面的樣子。這膜嵌在滑架裏,滑架是由不能延伸的柔性金屬線、繩索、聚酯纖維或者對位芳綸纖維制成的,還和端部配件連著。
圖 5 展現出了 Kleinwachter 和 Geerk 所設計的 Kleinwachter 扭轉裝置,在這兒充氣膜技術能夠拿來設計扭轉裝置,也就是扭轉肌。這個裝置存在一個嵌入了加強絲的環形隔膜,它的外邊緣與環形結構相連,內邊緣則和軸相接。
編織肌肉屬於結構緊密的氣動人工肌肉,力量輸出能力挺強的。就因為它是編織的纖維結構,所以能承受很大的壓力,能產生特別強大的力量。但是呢,編織肌肉的制造工藝特別復雜,成本不低,維護和修復也比較難。
褶皺肌肉執行器屬於那種外形是褶皺樣子的氣動人工肌肉。它的柔性跟適應力挺高,能夠達成復雜的運動模式。這種執行器響應迅速,不過力量輸出比較低,對精確控制的需求也高。
網狀肌肉屬於那種有著網狀結構的氣動人工肌肉。它能夠達到很高的柔性和自由度,在運動控制方面有著挺高的精確度。不過呢,網狀肌肉的制作以及控制比較麻煩,得要更多的氣動控制系統還有傳感器。
把氣動人工肌肉嵌入到其他材料或者結構裏,這叫嵌入肌肉。這樣能達成緊湊的結構,整合性也更好。但嵌入肌肉的安裝與維護挺復雜,得用到特殊的技術和器材。
【氣動人工肌肉的套用】
在 20 世紀 80 年代後期,日本東京的普利司通公司造出並銷售了首個商用氣動人工肌肉(PAM),叫做「Rubbertuators」,還在各種套用裏用了一陣子。現在呢,英國的 ShadowGroupofCompanies 以及德國的 FestoAG&Co. 都在生產各種用於工業機器人和醫療套用的 PAM 。
PAM適用於好多地方,像外骨骼、康復輔助,抓取還有處理那些幾何形狀復雜又精致的東西,還有多種運動很復雜的機器人機構,以及工業和服務機器人。PAM主要在要求合規性和低功率重量比的套用裏充當機器人執行器。袖狀膀胱肌肉或許能成為假肢中合適的動力系統。
PAM 被用在了各種各樣的生物機器人套用裏,還有模仿人類以及動物形態和生理學的仿生機器人上。就像圖 6 展示的那樣。Airbug 這個六足昆蟲狀的機器人,是 Berns 等人開發出來的。在對抗性排列中運用了流體肌。Jaryani 給出了一系列對抗性人工肌肉驅動裝置的動態公式,來產生蛇形機器人平面運動的動作,還有計算肌肉力控制。Ajax 是一款受到蟑螂啟發的有腿機器人,如圖 6 所示。

圖 6 是仿生機器人
氣動人工肌肉於醫療領域的套用前景挺廣泛的。就因為它有著出色的柔性和可控性,能夠用來取代病患或者殘疾人的肌肉功能。比如說,在康復治療的時候,氣動人工肌肉能助力癱瘓患者恢復肢體功能。
因為和神經系統相連線,它能夠模擬真正的肌肉運動,給予肌肉力量和控制的能力,助力患者重新獲得行走、抓握這類基本動作的能力。另外,氣動人工肌肉還能用到假肢的設計及制造當中,讓假肢更接近自然肢體的運動模式,提高使用者的生活質素。
氣動人工肌肉在機器人技術裏的套用可重要啦。一般來說,機器人得跟環境打交道,而氣動人工肌肉能夠讓機器人擁有跟人類肌肉差不多的動作水平糊柔韌性。有了氣動人工肌肉,機器人就能更靈活地去做各種事兒,像抓取、搬運還有操作之類的。
另外,氣動人工肌肉能夠用在機器人外骨骼的設計方面,讓機器人的力量和運動能力變得更強。就像在救援任務裏,配備了氣動人工肌肉外骨骼的機器人能夠承擔危險和重任,幫著人類做好各類艱苦的工作。
氣動人工肌肉在人機互動這一領域有著很重要的地位。人機互動技術不斷發展,這就需要機器能更好地明白和回應人類的意圖以及指令。憑借氣動人工肌肉,機器能夠更自然地效仿人類的動作,跟人類展開更直觀、更高效的互動。
比如說,在虛擬現實跟增強現實技術裏,氣動人工肌肉能拿來模擬身體的運動以及觸感反饋,讓使用者能更真切地感受虛擬環境。另外,氣動人工肌肉還能用到智能助理和機器人陪伴系統當中,給人提供更自然、更親近的人機互動感受。
不過呢,雖說氣動人工肌肉的套用潛力特別大,但是當下還是有一些難題和限制。這當中有一個就是控制系統太復雜。氣動人工肌肉的活動得進行精準的控制和協調,這樣才能跟人類肌肉的運動模式一樣。
所以,研發高效、穩定且精準的控制演算法與系統屬於重要的研究方向。另外,氣動人工肌肉的制造材料以及結構設計也得持續最佳化,讓其可靠性、耐用性和適應力得到增強。
未來的氣動人工肌肉會朝著更高的效能和效能努力。依靠改進材料效能與制造工藝,讓氣動人工肌肉能承受更大的力和壓力,還能一直保持不錯的柔性與可控性。另外,把氣動系統和控制演算法最佳化好,提升肌肉的響應速度與精確度,讓它更適合復雜的運動任務。
未來的氣動人工肌肉會更看重自適應和智能化這方面。依靠整合傳感器以及反饋機制,讓氣動人工肌肉可以即時察覺並適應環境的改變,進而更出色地完成任務。與此同時,把機器學習和人工智能技術引進來,促使氣動人工肌肉能夠去學習並最佳化運動模式,慢慢達成自主控制和智能決策。
未來的氣動人工肌肉會朝著小型化和微型化的方向發展。由於微納技術不斷進步,能在微尺度上生產氣動人工肌肉,讓其能夠在微型機器人、醫療器械等方面得以運用。這會大大增加氣動人工肌肉的套用領域,給微型器材的發展帶來新的推動力。
未來,氣動人工肌肉會跟可穿戴技術以及人體增強融合起來。把氣動人工肌肉用到智能服裝、外骨骼還有人體增強的器材裏,能夠讓人體的力量、靈活性以及運動能力變強。這對提高工作效率、進行康復治療還有日常生活的方便性都有幫助。
氣動人工肌肉的發展得靠多學科融合與合作套用才行。像工程學、材料科學、控制科學、生物學等好多領域的專家都得一起研究、開發氣動人工肌肉,這樣才能促進它的技術進步,讓套用更廣泛。
另外,跟其他技術以及系統相融合也會變成發展的關鍵走向,像是和人工智能、虛擬現實、生物醫學等方面的技術相結合,一塊兒達成更多樣、更高效的套用。
未來氣動人工肌肉的發展會朝著高效能、自適應、小型化、可穿戴以及多學科融合這些方向去走。這能給醫療、機器人技術、人機互動等方面帶來更多的創新與突破,給人類的生活還有科技進步貢獻更大的力量。
參考文章:Kalita、B.;Leonessa、A.;Dwivedy、S.K. 所著的【關於氣動人工肌肉執行器發展的綜述:力模型及套用】。Actuators 2022,11,288. https://doi.org/10.3390/act11100288











