參照格式
範銘鑠, 周平, 李渺, 李華龍, 劉先旺, 麻之潤. 羊場自動導航噴藥機器人設計與實驗[J]. 智慧農業(中英文), 2024, 6(4): 103-115.
Citation:FAN Mingshuo, ZHOU Ping, LI Miao, LI Hualong, LIU Xianwang, MA Zhirun. Automatic Navigation and Spraying Robot in Sheep Farm[J]. Smart Agriculture, 2024, 6(4): 103-115.
官網全文免費閱讀
知網閱讀
羊場自動導航噴藥機器人設計與實驗
範銘鑠 1,2 , 周平 2 , 李渺 2* , 李華龍 2 , 劉先旺 2 , 麻之潤 2
(1.中國科學技術大學 研究生院科學島分院,安徽合肥 230026,中國;2.中國科學院合肥物質科學研究院 智能機械研究所,安徽合肥 230031,中國)
摘要: [目的/意義] 大規模肉羊畜舍人工消毒存在費時費力、覆蓋不全和消毒不徹底的問題,為保持畜舍衛生和肉羊健康,本研究提出一種羊場自動導航噴藥機器人。
[方法] 從硬件、語意分割模型和控制演算法3個方面設計了自動導航噴藥機器人。硬件部份包括履帶底盤、網絡攝影機和折疊式噴藥裝置。語意分割模型部份透過引入壓縮通道網絡註意力(Squeeze-and-Excitation Network, SENet)和基於場景改進的十字交叉註意力(Criss-Cross Attention,CCA)模組,提出一種雙註意力ENet語意分割模型(Double Attention ENet, DAENet)。在控制演算法方面,針對機器人在面對岔路時無法控制行進方向的問題,利用模擬真實道路的方法,在羊舍外的道路上繪出車道線,提出了道路中心點辨識和車道線中心點辨識兩種演算法來電腦器人行進過程中的導航點。為了實作上述兩種演算法,使用了兩台網絡攝影機並設計了網絡攝影機切換演算法,依靠此演算法實作兩台網絡攝影機的切換,並控制噴藥裝置的開關;提出了一種偏移量與速度計算演算法控制機器人履帶左右輪速度,實作對於機器人行走的控制。
[結果和討論] DAENet模型在影像分割任務中的平均交並比(Mean Interp over Union, mIoU)達到了0.945 3;網絡攝影機切換演算法測試結果表明網絡攝影機的切換時間在15 s以內,機器人能正確、快速地帶動噴藥裝置的開關;中心點與偏移量計算演算法測試的結果表明,在處理多幀影片流時,演算法平均處理一幀圖片所用的時間為0.04~0.055 s,幀率為20~24 f/s,滿足實際工作的即時性要求;羊場實地的整體測試結果表明,機器人完成了兩個羊舍的自動導航和消毒任務,並且未碰撞路邊料槽,行進軌跡偏移量未超過0.3 m。在0.2 m/s的行進速度下,藥箱裏的藥液能夠滿足兩個羊舍的消毒任務。機器人處理影像的平均幀率為22.4 f/s,對於資訊處理的準確性和即時效能夠滿足實驗指標要求。噴藥覆蓋圈舍地面超過90%,滿足實驗指標要求。
[結論] 本研究提出的羊舍自動導航噴藥機器人以語意分割模型DAENet為基礎,中心點辨識演算法為核心,透過與硬件設計和控制演算法的相互配合,能夠在確保安全性和即時性的前提下,實作在羊舍內的自動導航和全覆蓋噴藥。
關鍵詞: 自動導航;噴藥機器人;電腦視覺;語意分割;註意力模組;中心點計算;DAENet
文章圖片

圖1 羊場自動導航噴藥機器人底盤
Fig. 1 Chassis of the automatic robot working in sheep farm
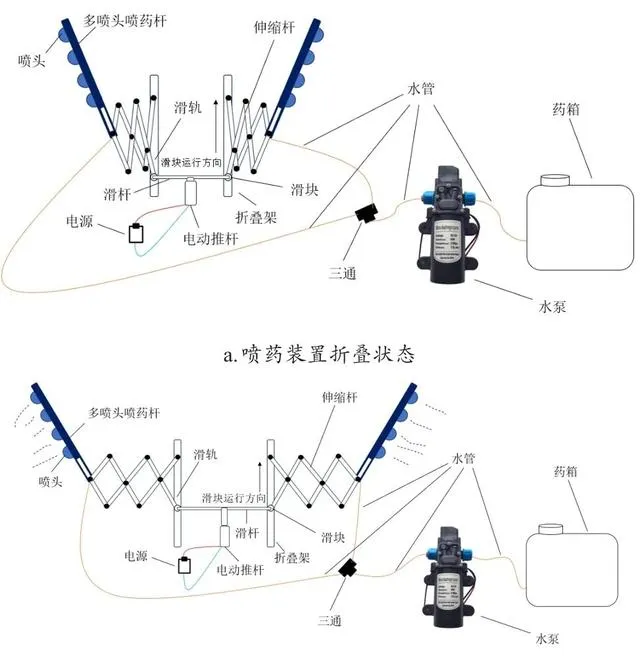
圖2 羊舍自動導航噴藥機器人的噴藥裝置
Fig. 2 The spraying device of the sheep shed automatic navigation spraying robot

圖3 羊舍自動導航噴藥機器人整體結構設計
Fig. 3 The overall structural design of the sheep shed automatic navigation spraying robot
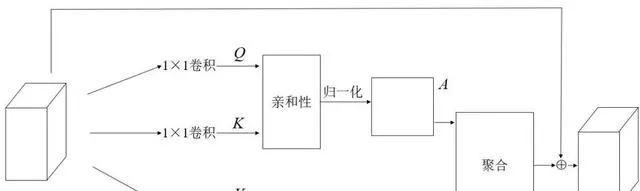
圖4 CCA的網絡結構
Fig. 4 The network structure of CCA
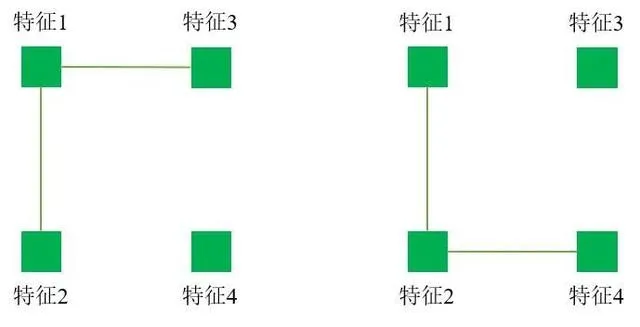
圖5 RCCA級聯結構
Fig. 5 RCCA cascade structure
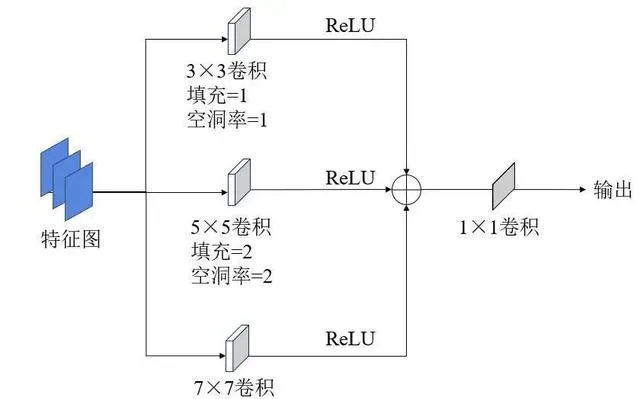
圖6 CCM的網絡結構
Fig. 6 The network structure of context convolution module
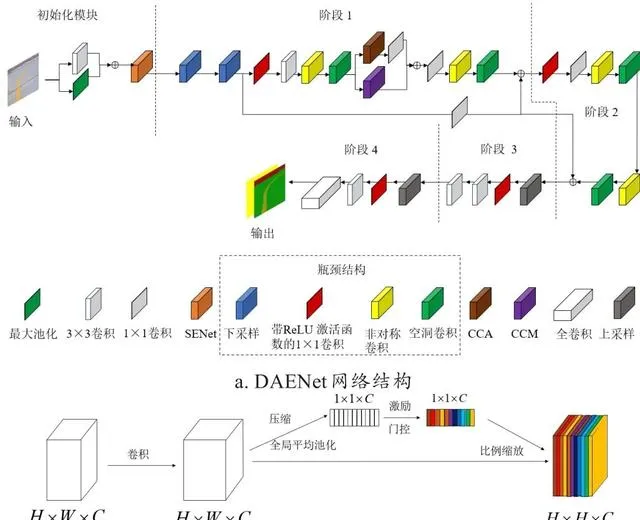
圖7 基於雙註意力機制的ENet模型
Fig. 7 ENet model based on dual attention
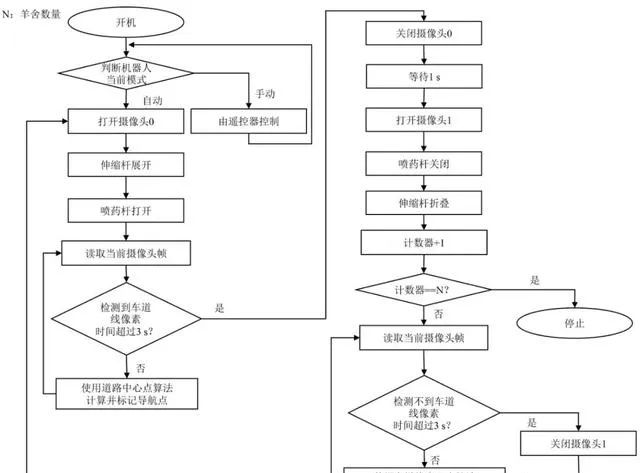
圖8 羊舍自動導航噴藥機器人系統的工作流程
Fig. 8 The workflow of the sheep shed automatic navigation spraying robot system
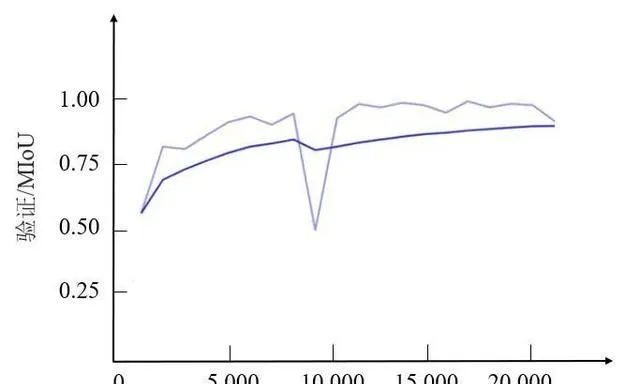
圖9 DAENet模型訓練過程中的mIoU
Fig. 9 mIoU during training process of DAENet model
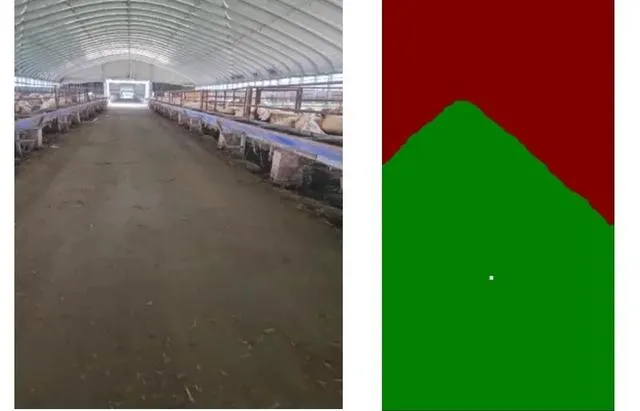
圖10 羊舍內道路中心點計算影像
Fig. 10 Image for calculating the center points of roads inside the sheep shed
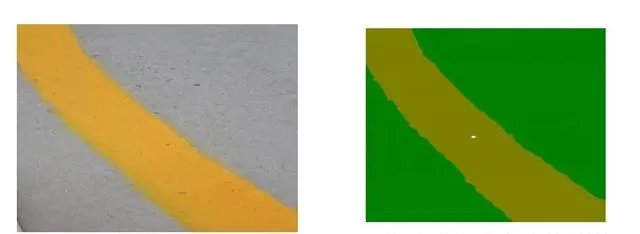
圖11 羊舍外車道線中心點計算影像
Fig. 11 Image for calculating the center points of lane lines outside the sheep shed
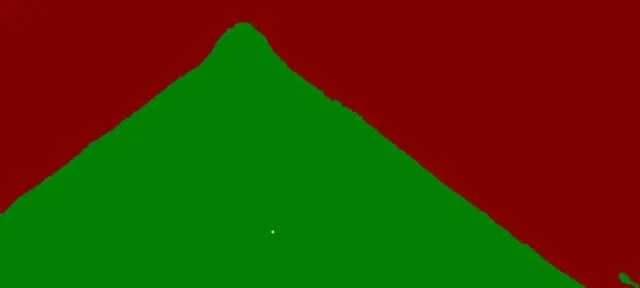
圖12 羊舍道路分割結果
Fig. 12 Results of road segmentation in the sheep shed

圖13 羊舍自動導航噴藥機器人的測試環境
Fig. 13 Test environment for sheep shed automatic navigation spraying robot

圖14 自動導航噴藥機器人實驗過程
Fig. 14 Automatic navigation and spraying robot during test

圖15 羊舍自動導航噴藥機器人的噴藥效果
Fig. 15 Spraying effectiveness of the sheep shed automatic
navigation spraying robot
作者介紹

李渺 研究員
李渺,中國科學院合肥物質科學研究院智能機械研究所 研究員, 80年代開始從事人工智能和農業知識工程的研究工作,90年代主持開發的「智能化農業軟件開發環境」套用於國家863「智能化農業資訊科技套用示範工程」—雲南、甘肅、四川示範區取得很好的經濟效益和社會效益。推動了中國智能化農業資訊科技研究與套用的發展。目前帶領研究團隊開展智能農機裝備方面的科研工作。
曾獲國家科技進步二等獎2次,中科院科技進步二等獎1次,甘肅省科技進步獎一等獎1次,雲南省科技進步二等獎1次。獲國務院政府津貼、第四屆中國科學院十大女傑獎。承擔國家自然科學基金、國家863計劃、國家科技攻關重大專項、中國科學院創新工程等科研專案23項。培養博士、碩士研究生72名,SCI、ISTP、EI、核心期刊上發表論文138篇;合著專著1部;獲得發明專利8項,申請發明專利21項;軟件著作權86項。
來源:【智慧農業(中英文)】2024年第4期
轉載請聯系編輯部授權
本期支持單位
濰柴雷沃智慧農業科技股份有限公司
歡迎存取期刊元宇宙空間

智慧農業微信交流服務群
為方便農業科學領域讀者、作者和審稿專家學術交流,促進智慧農業發展,為更好地服務廣大讀者、作者和審稿人,編輯部建立了微信交流服務群,有關專業領域內的問題討論、投稿相關的問題均可在群裏咨詢。 入群方法: 加小編微信 331760296 , 備註: 姓名、單位、研究方向 ,小編拉您進群,機構行銷廣告人員勿擾。

釋出征集

歡迎在我公眾號釋出科研團隊介紹、創新科研成果及相關活動等資訊。