来源:计算机视觉工坊
添加v:dddvision,备注:三维重建,拉你入群。文末附行业细分群
论文题目: MIXSUP: MIXED-GRAINED SUPERVISION FOR LABELEFFICIENT LIDAR-BASED 3D OBJECT DETECTION
作者:Yuxue Yang ,Lue Fan等
作者机构:Institute of Automation, Chinese Academy of Sciences
论文链接:https://arxiv.org/pdf/2401.16305.pdf
代码链接:https://github.com/BraveGroup/PointSAM-for-MixSup
MixSup提出了一种 混合粒度 监督的实用范例,通过同时利用大量的廉价聚类级标签和有限数量的准确盒级标签,在标签效率LiDAR-based 3D目标检测中取得了显著的性能提升。该方法重新设计了主流检测器中的标签分配,使其可以轻松集成到MixSup中,实现了实用性和普适性。在nuScenes、Waymo Open Dataset和KITTI上的验证表明,MixSup在使用少量昂贵标签的情况下,能够达到接近全监督性能的水平(最高97.31%)。此外,提出的PointSAM基于 Segment Anything Model,用于自动生成粗标签,进一步减轻了标注的负担。总体而言,MixSup为标签效率LiDAR-based 3D目标检测领域提供了一种创新的解决方案。
读者理解:
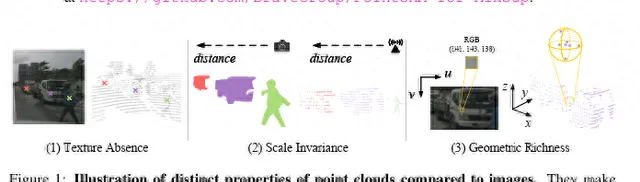
点云特性的重要性:作者通过对点云的纹理缺失、尺度不变性和几何丰富性的观察,深刻理解了 LiDAR数据的独特性质。这为提出MixSup的动机奠定了基础。
混合粒度监督的创新性:MixSup的主要创新点在于采用混合粒度监督,即利用大量的簇标签进行语义学习,同时使用少量准确的盒标签进行几何估计。这种设计能够更有效地利用标签,提高检测器性能。
标签效率与人工标注的平衡:通过引入簇标签的方式,MixSup显著降低了对人工标注的需求,提高了标签效率。特别是,簇标签相较于中心标签更为高效,而PointSAM进一步减轻了标注负担,提供了自动生成粗标签的方法。
1 引言
MixSup提出了一种创新的标签效率学习范例,通过同时利用大量廉价的簇标签和有限数量的准确盒标签,实现了显著的LiDAR-based 3D目标检测性能提升。其基于点云属性的观察,得出了一个检测器对于语义学习需要大量粗糙语义标签,但对于几何估计只需要少量准确几何标签的结论。采用语义点簇作为粗标签,并通过重新设计检测器中的标签分配,MixSup具有实用性和通用性。利用Segment Anything Model和PointSAM,进一步降低了簇标签的成本,使其成为LiDAR-based 3D目标检测领域的一项重要贡献。
2 方法
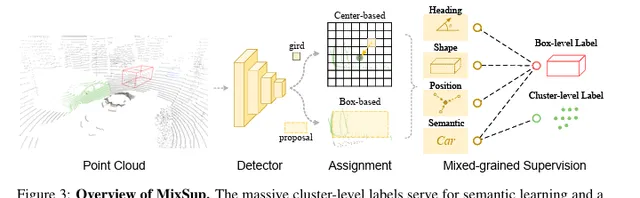
本文提出了一种新的LiDAR-based 3D目标检测的标签效率学习方法,称为MixSup。方法首先观察到点云的特性,包括缺乏纹理、尺度不变性和几何丰富性。基于这些观察,MixSup采用大量廉价的粗标签(簇级标签)和少量准确的标签(盒级标签)进行混合粒度监督,以提高标签效率。
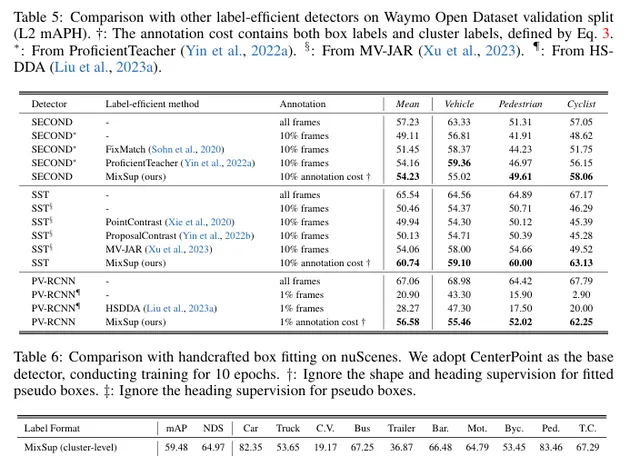
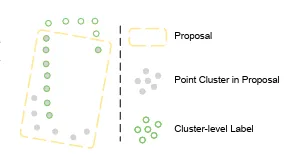
具体而言,方法首先提出了一种更优的粗标签获取方式,即使用簇级标签代替先前的中心级标签,通过在Bird’s Eye View中绕对象进行三个粗略点击形成簇级标签。相比于先前的中心级标签,簇级标签更为高效,且具有更多信息。通过实验证明,簇级标签的平均标注成本仅为准确盒标签的约14%。
在混合粒度监督方面,本文重新设计了检测器中的标签分配模块,以确保适用于簇级标签。包括基于中心的分配和基于盒的分配,其中基于中心的分配使用簇中心替代对象中心,并通过引入盒标签的内部簇中心来解决不一致性。
对于基于盒的分配,方法引入了盒-簇IoU(Interp over Union),通过计算点云中簇级标签和提议框之间的IoU,将簇级标签分配给提议框,适用于锚点和两阶段检测器。
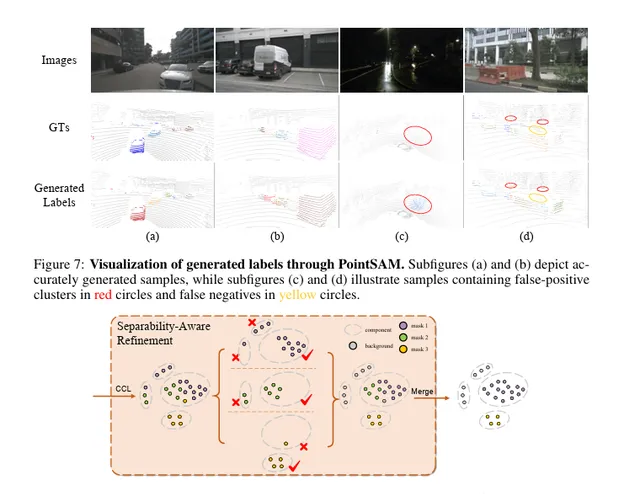
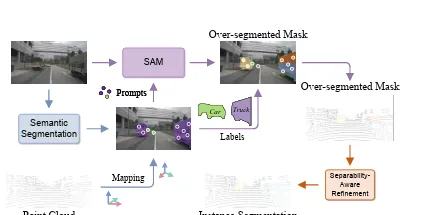
为了进一步减轻粗标签的标注负担,本文提出了PointSAM,通过利用SAM(Segment Anything Model)生成自动粗糙标签。PointSAM包括SAM-based 3D实例分割和可分离感知细化两个模块,通过利用SAM生成2D语义掩码,并将其映射到3D点云,以及通过可分离感知细化提高分割质量。
最后,方法定义了训练损失,将粗标签和准确标签分别用于分类和回归,形成MixSup的综合损失函数。与其他标签效率学习方法(如半监督、弱监督、自监督)不同,MixSup的设计哲学更为实用,通过整合不同类型的监督信息,以适用于流行的检测器,实现更好的性能。通过与半监督学习中的self-training技术的结合,MixSup还展示了与其他标签效率方法的无缝协作的潜力。
总体而言,MixSup通过混合粒度监督、高效获取簇级标签和自动粗标签生成,成功提高了LiDAR-based 3D目标检测的标签效率,取得了显著的性能提升。
3 总结
本文通过对点云独特属性的深入研究,验证了在LiDAR-based目标检测中,语义学习需要大量粗标签,而几何估计只需要少量准确标签的结论。提出了MixSup框架,通过同时利用大量簇标签和少量盒标签,实现了标签效率的提升。引入PointSAM减轻了标注负担,方法在三个主流基准测试中取得了显著的性能提升。未来工作将重点探讨MixSup与半监督方法的合作潜力,并借助自动标注方法进一步优化性能。