编码器是编码旋转角度、线性位移及速度等运动参数的传感器,可将机械运动转换为电信号输出,具有高精度、高分辨率、快速响应等特点,适用于工业自动化、汽车制造、机器人技术、医疗设备、航空航天、机床等众多需要精确位置测量的应用场景。
编码器的数据反馈对于实现人形机器人运动的精密控制和定位至关重要,主要用于监测和控制机器人关节的运动位置,确保精确的运动控制和定位。旋转关节通常需要两个编码器以确保准确度和稳定性,线性关节和灵巧手则需要一个编码器。
一、编码器:伺服系统关键器件
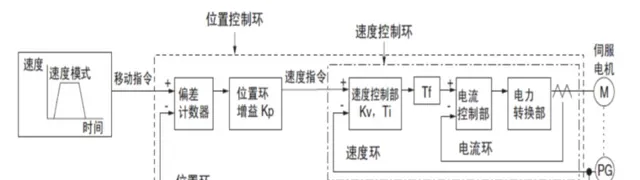
编码器通常与电机相连,检测其状态,并把信号反馈回驱动器,驱动器对反馈信号进行汇总、分析、修正,从而精确控制执行机构的位置、速度、转矩等输出变量,实现闭环。
伺服系统的基本组成部分包括上位机、电机、编码器、驱动器、控制器等。从成本构成上看,驱动器成本占整个伺服系统成本的42%,电机的成本占比约35%,编码器成本占比约为11%。
伺服驱动器接受上位机发送的信号,然后转换为功率信号,即能够控制电机的电流,驱动电机工作,编码器作为核心传感器把电机旋转的角度和速度实时反馈给驱动器,驱动器依照反馈信号保证电机稳定和良好地输出性能,形成闭环控制,确保电机位置、转向、转速满足预定要求。
二、编码器分类
整体看,以测量类型做区分,编码器可以分成直线/线性编码器、旋转编码器;以输出信号来区分,编码器可以分为增量式编码器、绝对式编码器;从技术原理角度出发,编码器可以分为磁编码器、光编码器、电感编码器。
1、测量类型:直线/线性编码器、旋转编码器
直线/线性编码器测量物体的直线位移,旋转编码器测量物体的旋转角度。

直线/线性编码器是一种用于测量物体直线运动的装置,可以将物体的线性移动转换为电信号输出。通常由传感器和标尺组成,标尺被固定在物体上,传感器则测量标尺上的位置信息,主要用于机械加工、数控机床、3D 打印、半导体制造等领域。直线编码器的代表是光栅尺。
旋转编码器是一种用于测量旋转轴角度、速度和位置的传感器,可以直接安装在物体上,以测量物体的旋转运动。它们广泛应用于自动化控制系统、机器人、航空航天、汽车、医疗设备等领域。
2、输出信号:绝对式编码器和增量式编码器
绝对式编码器是一种位置传感器,它能够提供设备在绝对坐标系中的位置信息。绝对式编码器的工作原理通常涉及一个码盘(或称为光栅盘),它上面有一系列的编码线或槽。这些编码线以特定的模式排列,每个位置的编码线组合是唯一的。码盘与编码器的读头相对应,读头包含光电传感器或其他类型的传感器,用于检测码盘上的编码信息。
与增量式编码器不同,绝对式编码器不需要依赖于一个参考点或复位信号来确定位置,因为它在每个位置都有唯一的编码与之对应。

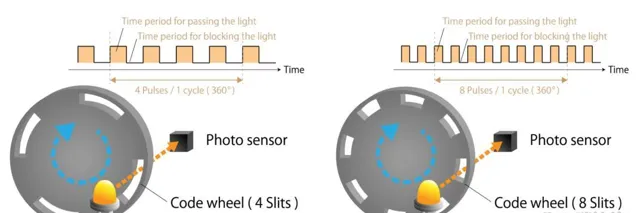
增量式编码器是一种位置和速度传感器,它提供相对于某个初始位置或上一个测量点的位置变化信息。增量式编码器不存储绝对位置信息,而是通过计数脉冲来跟踪位置的变化。增量式编码器内部通常包含一个码盘,它与编码器的读头相对应。读头包含光电传感器或其他类型的传感器,用于检测码盘上的光栅线。当码盘旋转或移动时,传感器会检测到光栅线产生的脉冲信号。
总结来说,增量式编码器适合于成本敏感且对绝对位置精度要求不高的应用,而绝对式编码器则适用于需要高精度、高可靠性和简便性的应用场景。选择哪种编码器取决于具体的应用需求、预算和系统设计考虑。
2、技术原理:磁编码器、光编码器以及电感编码器
磁编码器,利用电磁感应原理,将物理信号转换为数字信号,以实现位置和角度的测量。磁编码器由磁性传感器、磁环和信号处理器组成。与传统的光电编码器不同,磁编码器不依赖于光学原理,而是通过感应磁场的变化来确定位置信息。磁编码器的工作原理基于磁感应元件对磁场变化的响应。当码盘旋转或移动时,磁场的分布也随之改变。磁敏传感器检测到这些变化,并将其转换为电信号。通过分析这些信号的序列和时间,可以确定码盘的位置和移动速度。
光感编码器,通常称为光电编码器,是一种利用光学原理来测量位置和速度的传感器。光编码器由发光元件、光敏元件及码盘(即一个刻有规则的透光和不透光线条的圆盘)组成。它们将机械位置转换为电信号,通常用于精确的位置反馈和速度控制。当光栅盘旋转或移动时,光栅图案会周期性地阻断和允许光源发出的光到达光电传感器。这些变化被传感器检测到,并转换为电脉冲信号。通过计算单位时间内产生的脉冲数量,可以确定位置变化和速度。
电感式编码器,通过检测磁场的变化来确定物体的位置和移动速度,是一种利用电感原理来测量位置和速度的传感器。电感式编码器的工作原理基于法拉第电磁感应定律,即当磁场中的导体发生相对移动时,会在导体中产生电动势。在电感式编码器中,码盘上的磁性材料与感应头中的线圈相互作用,产生变化的磁场。当码盘旋转或移动时,磁场的变化会在线圈中产生感应电流,这个电流随着码盘的位置变化而变化。电子电路检测这些电流变化,并将其转换为脉冲信号或模拟信号,从而提供位置和速度信息。脉冲信号的频率与码盘的旋转速度成正比,而脉冲的数量则与旋转的总角度有关。

系统看,光学编码器的优势为分辨率、准确度较高,但是码盘在灰尘、油污环境中易受污,影响可靠性和精度;磁编码器在精度和分辨率逊色于光学编码器,其优势在于感应原理为未接触式(通过测量磁场的变化感应),不易受到恶劣环境的影响,更耐用、抗振和抗冲击;电感式编码器精度、分辨率均较高,且耐受灰尘、油污,但其对磁铁的距离和方向非常敏感,稍有偏离则容易造成测量误差。
三、编码器两类使用场景
焉知科技目前重点关注智能电动汽车、人形机器人,因此本章节以这2个使用场景为主。
1、人形机器人:
特斯拉 BOT 运动控制模块主要分为直线执行模组、旋转执行模组和灵巧手,编码器用于测量关节角度和位置,确保 BOT 的运动精度和稳定性。
旋转执行模组有14个,每组包括无框力矩电机、谐波减速器、双编码器、力矩传感器以及轴承,赋予 BOT 精准的旋转控制能力。直线执行模组有14个,每组包括无框力矩电机、行星滚柱丝杠、编码器、力传感器以及轴承,这些零部件相互协作,使 BOT 能够实现精准的运动。灵巧手使用的空心杯电机模组则由空心杯电机、减速器和编码器构成,从而使得 BOT 手部能够实现高度敏感和灵活的运动,为实现复杂的抓取和操作任务提供了坚实的基础。
磁式编码器因其体积小、重量轻、工作温度范围宽、抗冲击、抗震、稳定性强等优点,在人形机器人领域得到广泛应用。

2、汽车:
磁编码器在汽车中的应用非常广泛,它们利用磁场变化来精确测量角度和位置,对于提高汽车的性能和安全性起着重要作用。不管油车还是电车,都在使用精度高、可靠性和耐用性强的磁编码器,据 Yole 对于整体磁传感器下游行业的统计和预测,汽车应用的占比已经超过了整体市场的 50%。随着汽车向电动化、智能化发展,磁编码器的应用范围预计将进一步扩大。
以下是一些磁编码器在汽车中的具体应用:
传动系统控制:监测传动轴的转速和位置,实现平稳的换挡操作和提供所需的动力输出。
发动机管理系统:测量发动机曲轴或凸轮轴的位置和速度,用于燃油喷射、点火定时和可变气门正时系统。
防抱死制动系统(ABS):监测车轮的转速变化,帮助实现ABS和电子稳定控制(ESC)等关键功能。
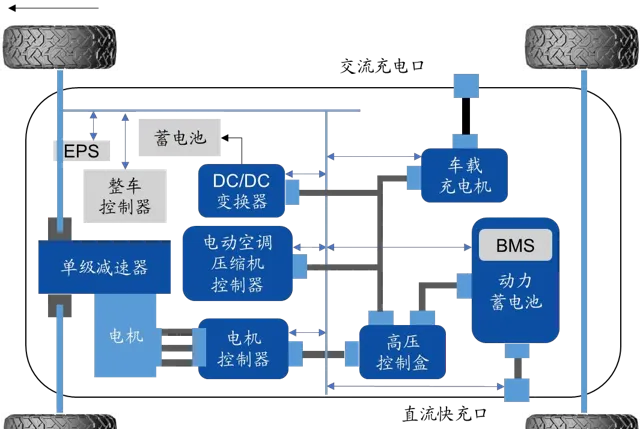
转向系统:测量方向盘的转角,用于电动助力转向系统(EPS)和车道保持辅助系统。
悬挂系统:控制悬挂系统的调整,提供适应性或主动悬挂控制。
电池管理系统(BMS):在新能源汽车中,磁编码器可以用于监测电池系统的充电状态和健康状态。
车载充电系统(OBC):监测充电过程中的电流和电压变化,确保充电安全和效率。
直流变换系统(DCDC):监测和控制电压转换过程,为汽车电子设备提供稳定的电源。
启动发电机系统:监测启动发电机的工作状态,提高启动性能和发电机效率。
油门控制系统:测量油门踏板的位置,用于电子油门控制系统,提高油门响应速度和燃油效率。
车辆仪表和驾驶信息反馈:测量车速和其他关键参数,为驾驶员提供准确的车辆状态信息。
新能源汽车电机控制:在电动汽车和混合动力汽车中,磁编码器用于电机控制系统,提高电机效率和整车性能。
安全监测:用于监测车辆的安全相关部件,如安全带张紧器和气囊部署系统。