机器人导航与感知:闵可夫斯基几何的引领
随着科技的飞速发展,机器人技术逐渐成为现代社会中不可或缺的一部分。从工业生产线上的自动化机械臂,到家庭中的智能扫地机器人,再到深海和宇宙探索中的高级机器人,它们都在为人类的生活和工作带来了巨大的便利。而在这背后,闵可夫斯基几何作为机器人导航与感知的基础,发挥着不可或缺的作用。
闵可夫斯基几何与机器人导航
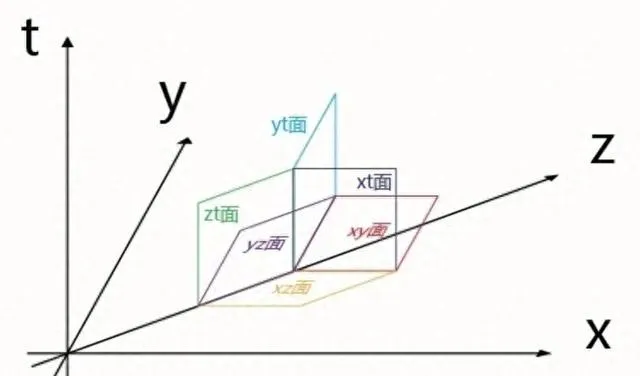
机器人导航是指机器人在未知或已知环境中,根据任务要求自主规划路径并移动到达目标点的过程。闵可夫斯基几何为机器人导航提供了坚实的数学基础。在闵可夫斯基空间中,机器人的位置、速度和加速度都可以表示为向量,这使得机器人的运动轨迹可以更加直观和精确地描述。
基于闵可夫斯基几何,机器人可以构建全局和局部的地图模型,实现精确的路径规划和导航。全局地图提供了整个环境的概览,帮助机器人了解环境中的障碍物和目标点的位置;而局部地图则更加关注机器人周围的局部区域,为机器人提供实时的导航信息。
闵可夫斯基几何与机器人感知
机器人感知是指机器人通过传感器获取环境信息,并对其进行处理和理解的过程。闵可夫斯基几何为机器人感知提供了强大的工具。通过将环境信息转换为闵可夫斯基空间中的几何对象,机器人可以更加直观地感知和理解环境。
例如,在视觉感知中,机器人可以通过摄像头捕捉图像,并利用计算机视觉技术将图像转换为闵可夫斯基空间中的三维模型。这样,机器人不仅可以感知到物体的位置、形状和大小,还可以理解物体的空间关系和运动状态。
闵可夫斯基几何的优势

使用闵可夫斯基几何进行机器人导航和感知具有显著的优势。首先,闵可夫斯基几何提供了一种统一的时空描述方式,使得机器人的运动和环境感知可以在同一个框架下进行,简化了问题的复杂性。其次,闵可夫斯基几何具有强大的数学工具支持,使得机器人导航和感知的精度和效率得到了显著提高。最后,闵可夫斯基几何还为机器人的自适应能力和鲁棒性提供了基础,使得机器人可以更好地应对复杂和不确定的环境。
随着机器人技术的不断发展和应用领域的不断拓宽,闵可夫斯基几何在机器人导航与感知中的作用将越来越重要。未来,我们期待看到更多基于闵可夫斯基几何的创新性应用,为机器人技术的发展注入新的活力。
随着技术的不断突破,闵可夫斯基几何已经从简单的导航和感知应用,深入到机器人技术的多个核心领域,为机器人提供了更高级、更智能的功能。
1. 实时动态规划
在动态、不确定的环境中,机器人需要实时调整其路径和动作来应对突发情况。闵可夫斯基几何为机器人提供了在时间和空间上连续、统一的描述方式,使得机器人可以在极短的时间内完成复杂的路径规划和优化,实现实时的动态规划。
2. 高级感知与认知
除了基本的物体识别和位置感知,闵可夫斯基几何还为机器人提供了高级的感知和认知能力。通过深度学习和模式识别技术,机器人可以理解和预测环境中的复杂动态,如行人的运动轨迹、车辆的行驶模式等,从而实现更高级的任务执行和决策。
3. 机器人之间的协同与通信
在多机器人系统中,机器人之间的协同和通信至关重要。闵可夫斯基几何为机器人提供了一个统一的时空框架,使得不同的机器人可以在这个框架下进行信息共享和协同工作。这不仅提高了机器人系统的整体效率,还使得机器人能够更好地适应复杂和多变的环境。
4. 情感识别与表达
随着人机交互的日益频繁,机器人需要具备一定的情感识别与表达能力。闵可夫斯基几何为机器人提供了在情感空间中进行描述和表达的基础。通过分析和模拟人类的情感变化,机器人可以更好地理解人类的需求和意图,从而提供更加贴心和人性化的服务。
5. 机器人学习与自适应
在未知或不确定的环境中,机器人的学习和自适应能力至关重要。闵可夫斯基几何为机器人提供了一种连续、统一的时空描述方式,使得机器人可以在这个框架下进行持续的学习和进化。通过不断地收集和分析环境数据,机器人可以逐渐优化其导航、感知和决策策略,从而适应更加复杂和多变的环境。
展望未来
随着技术的不断进步和应用领域的不断拓宽,闵可夫斯基几何在机器人技术中的应用前景将更加广阔。未来,我们期待看到更多基于闵可夫斯基几何的创新性应用,为机器人技术的发展注入新的活力。同时,我们也希望机器人能够在人类的生活中发挥更大的作用,为我们带来更加便捷、高效和美好的生活体验。











