导读: 触觉传感器是提升机器人对环境和物体认知能力的重要工具。对于机械手来说,集成大面积触觉传感器能增强其感知和交互能力,显著提升其自适应抓取能力。基于颗粒物阻塞的机械手在抓取物体时表现出良好的自适应和变刚度功能,但由于内嵌颗粒物以及包裹颗粒物的薄膜具备高弹性和大变形特性,增加了触觉传感器的设计难度。为了解决这一问题,华南理工大学吴贤铭智能工程学院与其他多所高校合作,在国际一流机器人期刊 【先进智能系统(Advanced Intelligent Systems)】上发表了一篇论文,介绍了 一种通过可拉伸光电感知皮肤实现颗粒阻塞软体抓手大面积触觉感知的技术,并设计了一款具备形状自适应、变刚度功能的抓手。该抓手能够感知多点接触,实现对物体抓握姿态的识别与滑移检测。 文末附有论文题目和文章链接。
▍
智能触觉感知颗粒物阻塞软抓手
颗粒阻塞软抓手 在执行不同形状、大小、硬度、重量物体的抓取任务中展现出优异的 形状自适应功能和大负载抓取能力。 然而, 内嵌离散颗粒物和包裹颗粒物的高弹薄膜 使得传感器的设计和制作增加了难度,同时也增加了颗粒阻塞软抓手与传感单元集成的难度。为了解决该问题,研究人员从颗粒阻塞抓手的内部填充物和柔性皮肤两个方面着手,分别开发了基于视觉感知或磁性皮肤的触觉传感器。这些方法虽然可以实现对物体接触位置、接触力和形状的检测,但也存在局限性。例如,视觉传感器对内部颗粒物种类和处理算法要求较高,而磁式触觉传感器易受环境磁场的干扰。
小编今天要介绍的是一种新的解决方案,即 基于高度可拉伸柔性光波导阵列传感器的新型颗粒阻塞抓手,该抓手具备大面积触觉感知能力。 该研究由来自 华南理工大学吴贤铭智能工程学院的李云泉副教授研究团队与多所高校的研究者合作完成, 近期发表在国际一流机器人期刊 【先进智能系统(Advanced Intelligent Systems)】上。
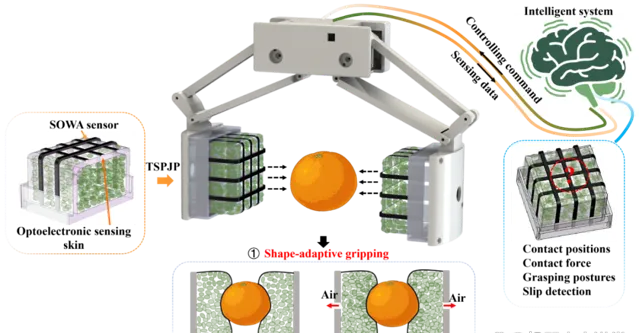
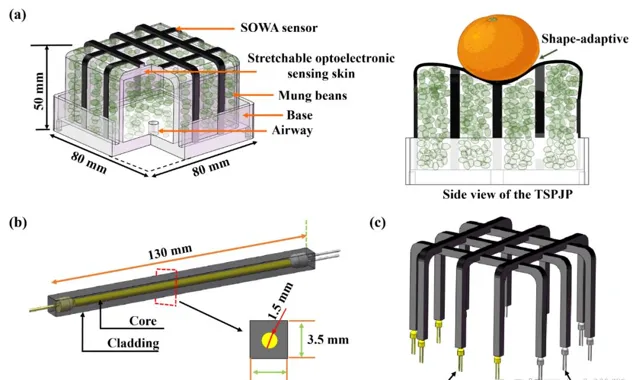
图1 本论文所提出抓手和传感器的概念图
这款软抓手主要由两个平行配置的 具有触觉感知的颗粒阻塞软体执行器(tactile sensing particle jamming pad, TSPJP) 组成。TSPJP的表面皮肤集成了一个 高度可拉伸的3×3阵列柔性光波导传感器 ,内部填充了颗粒物。基于简单的机器学习算法,该TSPJP可以 检测49个接触位置并预测对应的接触力大小。 这款抓手能够高效地,自适应抓取从软到硬、从轻到重的各种物体。在抓取任务过程中, 还能识别与物体的接触位置,判断物体的抓握姿态,并检测物体的滑移。
图2 基于颗粒物阻塞抓手的形状自适应能力的抓取实验
图3 颗粒物阻塞抓手的抓取实验
抓取感知测试: 基于TSPJP的形状自适应功能,TSPJP可以抓取硬度、形状、重量不同的物体,并且通过简单的加权方法可以定性感知物体与TSPJP的接触位置(如图4所示)。
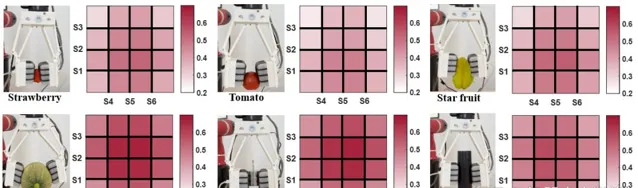
图4 抓取物体时,将传感器的六个电压输出变化量映射到TSPJP的16个区域
物体的不同抓取姿态识别: 利用TSPJP的大面积触觉感知能力,实现对抓手手中抓取物体的姿态识别,有助于抓手调整抓取姿态,从而实现对物体的稳定抓取。研究人员利用机器学习方法对三个圆柱体(图5)总共24个抓取姿态进行了识别,识别率为98.62%。

图5 物体的不同抓取姿态识别
基于滑移检测的物体稳定性抓取: 研究人员利用小波变换方法实时分析抓取物体的过程中传感器输出信号的频谱特征变化情况,当其中之一的信号频谱特征超过设定的阈值时,控制器接收到此反馈信息增大抓手的抓取力从而实现对物体的稳定抓取,如图6和图7所示。
图6 基于滑移反馈信息的物体稳定性抓取
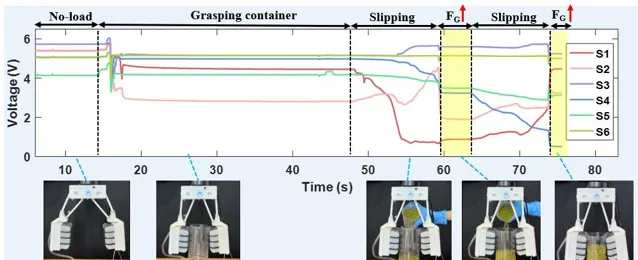
图7 基于滑移反馈信息的物体稳定性抓取
▍ 「光电感知皮肤」,实现高灵敏度、大面积触觉感知
柔性光波导传感器具有不受电磁干扰、高灵敏度、快速响应能力、高度可拉伸等优点, 研究人员利用其特性设计了如图8所示的柔性光波导阵列传感器,并将其集成到颗粒阻塞执行器的表面柔性皮肤里。由于柔性光波导阵列传感器的覆盖到整个软体执行器的表面,因此, 颗粒阻塞软体执行器具有大面积的触觉感知功能。
如图8所示为柔性光波导阵列传感器和TSPJP的制作过程。研究人员采用 一体成型的方法 来制作3×3阵列柔性光波导传感器,且用 纯甘油液体(折射率为1.48)制作光波导的内芯。降低了传感器的制作难度和成本,并缩短了制作时间。 因为内芯为液体,所以传感器对压力响应的灵敏度也会有所提高。
图8 TSPJP的设计。(a)TSPJP的三维结构图(左)和形状自适应功能展示(右),(b)单根柔性光波导传感器,(c)3×3阵列的柔性光波导传感器。
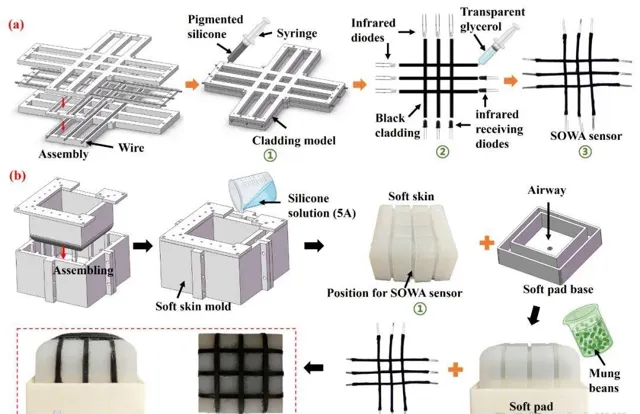
图9 (a)柔性光波导阵列传感器的制作,(b)TSPJP的制作过程。
▍ 柔性光波导传感器的性能测试
研究人员 测试了单根柔性光波导传感器的压力响应、弯曲响应和重复性, 如图10所示为实验结果。实验结果表明由硬度为10A硅胶制作的柔性光波导传感器的压力响应具有 较高的灵敏度(最高的灵敏度可达10.36% dB kPa-1) 和 较宽的检测范围(> 350 kPa)。 此外,该柔性光波导传感器表现出 对弯曲不敏感的特性 。这是由于光波导外壳内壁比较光滑,传感器弯曲时产生的光散色很少。这有利于传感器与软体执行器集成后依然能够保留大部分光能量。
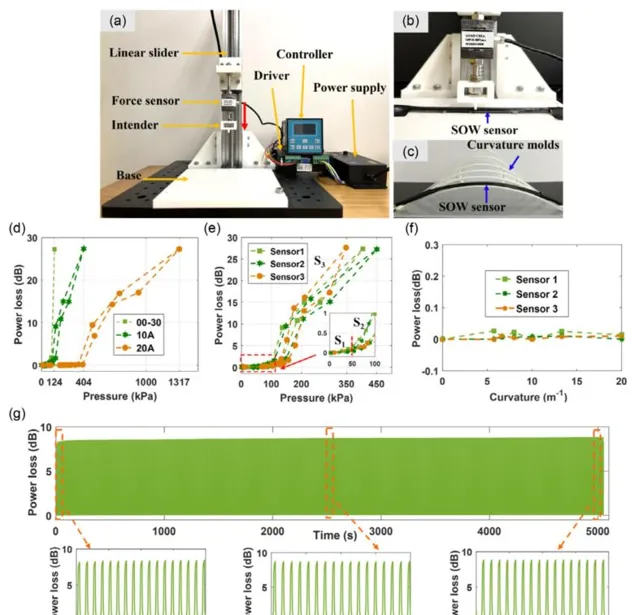
图10 3×3阵列柔性光波导传感器的性能测试。(a)测试装置,(b)传感器的压力响应测试方法,(c)传感器的弯曲测试装置,(d)不同外壳硬度的传感器的压力响应曲线,(e)外壳硬度为10A的传感器的压力响应曲线,(f)外壳硬度为10A的传感器的弯曲响应曲线,(g)传感器的重复性测试结果。
▍ TSPJP的性能测试
研究人员从TSPJP的 形状自适应能力和感知能力 两个方面进行了探索。TSPJP表面集成的3×3阵列传感器 总共有6个输出信号 (图11(a))。根据光波导阵列传感器在TSPJP表面分布的特点,将 TSPJP划分为49个位置 (图11(b)),包括 16个区域(A1~A16),传感器的24小节(S1~S24),传感器的九个交叉点(P1~P9)。

图11 (a)柔性光波导传感器的六个输出信号分布图,(b)TSPJP的区域划分。
TSPJP的形状自适应能力测试: TSPJP的表面感知皮肤很软,因此,物体与TSPJP接触会使TSPJP表面凹陷而产生一定形变,内部颗粒物之间的间距进一步减小。在负压条件下,撤去物体,TSPJP表面仍会保留与物体接触时的变形。这证明了TSPJP具有对不同物体的形状自适应功能(图12)。
图12 TSPJP的形状自适应能力测试
TSPJP的感知能力测试: 与一般的集成多个独立传感器单元的阵列传感器不同,虽然TSPJP的表面没有覆盖高密度的传感单元,但当其表面某个位置受到外力时,TSPJP内部颗粒物的分布发生改变,从而对柔性光波导阵列传感器的不同位置产生不同大小的挤压力,传感器的输出也会发生变化且离受力点越近的传感器信号产生的变化越大。因此,可以通过传感器的输出信号大小来检测接触位置和对应的接触力。 当TSPJP表面的九个交叉点在受到外力时,可用直接通过六个输出电压值的大小来分析出受力的点。此外,TSPJP可以凭借其大面积触觉感知能力来实现类人手一样预估物体重量的功能。 (如图13和14)
图13 TSPJP的9个交叉点对外力的感知
图14 TSPJP感知不同重量的物体
基于机器学习方法,实现TSPJP准确检测多个接触位置和接触力的功能。 如图15所示,研究人员利用机器学习方法来检测TSPJP表面划分的49个接触位置, 识别率高达99.80% 。并用 LSTM网络对接触力进行预测,RMSE误差为0.3869N。
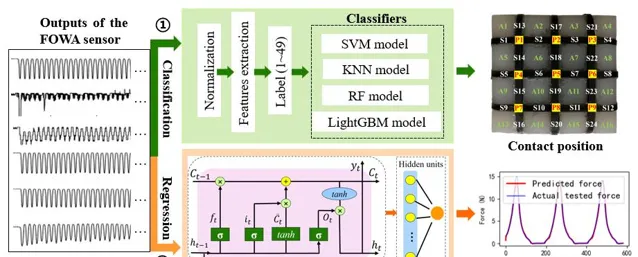
图15 基于机器学习方法的接触位置识别和接触力预测
▍ 总结与展望
以上研究表明利用柔性光波导阵列传感器来实现颗粒阻塞软体抓手大面积触觉感知能力的方法同时兼具低成本、易制作和较高的感知性能,为丰富抓手的感知能力提供了一种新的解决方法。在未来的工作,研究人员将进一步优化算法从而实现抓手在作业任务中的自主性和智能化。
文章题目与链接:
Mo, L., Xie, W., Qu, J., Xia, J., Li, Y., Zhang, Y., Ren, T., Yang, Y., Yi, J., Wu, C., & Chen. Y. (2024). Empowering Particle Jamming Soft Gripper with Tactility via Stretchable Optoelectronic Sensing Skin. Advanced Intelligent Systems.
http://doi.org/10.1002/aisy.202400285
论文相关的附件视频可以在论文网页查看











