靈巧手是人形機器人「小腦」實作靈巧操作、人機互動的重要載體,向高整合度和 智慧化發展。靈巧手是一種高度靈活、復雜的末端執行器,在機器人與環境互動中 起關鍵作用。靈巧手因其能夠模仿人手的各種靈巧抓持和復雜操作能力,廣泛套用於航空航天、醫療、智慧制造等領域。根據 Statista數據顯示,2021 年全球機器人靈巧手市場規模約為 11.6 億美元,預計在2030年增長至30.35 億美元,2022-2030 年間CAGR為10.9%。
▍ 近幾年低成本、模組化靈巧手成為市場關註重點
機器人靈巧手作為一種新型的末端執行器,在機器人與環境的互動中起著關鍵作用。自20世紀70年代起,國內外高校與研究機構就對靈巧手末端單元進行了大量研究工作,從三指靈巧手再到五指仿生靈巧手,覆蓋工業場景與通用場景,靈巧手的技能也從簡單的抓取過渡到疊衣、擰螺絲等更加復雜的操作,透過高精度+觸覺傳感的方式滿足實際場景下的作業要求。
 早期靈巧手代表產品
早期靈巧手代表產品
自20世紀70年代,為了滿足多樣化作業要求,機器人手部單元開始從簡單夾具過渡到仿生靈巧手,這一時期的代表產品包括日本「電子技術實驗室」的Okada靈巧手、美國史丹佛大學的Stanford/JPL靈巧手,以及麻省理工學院與猶他大學聯合研發的Utah/MIT靈巧手。雖然早期靈巧手看起來並不靈活,但其理論探索奠定了仿人型多指靈巧手研究的基礎,為後續多指靈巧手的設計提供了寶貴的理論和實際經驗。
20世紀末,機器人靈巧手進入了第一個快速發展階段,隨著嵌入式硬體的發展,多指靈巧手開始向著高度整合與感知能力方向進行技術叠代,這一時期的典型產品包括德國宇航中心的DLR-Ⅰ和 DLR-Ⅱ靈巧手,該靈巧手共整合了 25 個傳感器,包括類似人工皮膚的觸覺傳感器、關節扭矩傳感器、位置傳感器和溫度傳感器等,在靈活度與感知能力進行升級。然而多指靈巧手也面臨了制造成本高,可靠性不佳以及維護成本大等問題。因此近幾年,輕量化、魯棒性、模組化以及低成本靈巧手成為市場關註重點。
▍ 多指靈巧手設計、驅動及傳動結構分析
從靈巧手產品設計來看,其結構方式主要分為驅動器內建式、驅動器外接式與驅動器混合制式。由於技術工藝限制,早期靈巧手通常采用外接驅動器設計,尺寸和體積較大。隨著一體化關節電機的技術發展,驅動器尺寸以及傳動精度有了較大提升,內建驅動器成為市場上靈巧手的主流技術路線,靈巧手的體積呈現輕量化發展。
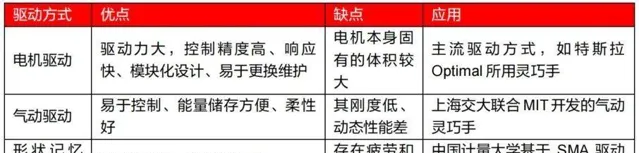
靈巧手驅動方式對比(按驅動方式分類)
在驅動方式上,靈巧手分為電機驅動、氣動驅動、形狀記憶合金驅動三種主流形式。電機驅動是目前靈巧手的主要驅動形式,具備驅動強度大,傳動精度高,響應速度快等優勢,近幾年小型靈巧手配備的伺服電機技術叠代迅速,市場上湧現了一批傑出的機器人靈巧手企業。而氣動驅動的成本較低,但存在剛度低、動態效能差等效能缺陷,早期氣動驅動起源於日本,通常可分為Y型夾指和平型夾指,缸徑分為16mm,20mm,25mm,32mm和40MM幾種。目前套用較為廣泛的是日本SMC氣動手指,主要用於工業場景。形狀記憶合金驅動方式則更多地出現在實驗階段,這種驅動方式擁有驅動速度快的特點,但耐久度低,並不適合長期高負載使用。

機器人多指靈巧手分類
此外,在傳動方式上,靈巧手又分為腱繩傳動式、齒輪驅動式與連桿驅動式。腱繩傳動結構簡單、控制靈活但控制精度不高、抓取力不足;齒輪驅動式可以實作高控制精度,但結構復雜,成本較高;連桿驅動式能夠抓取大型的物體且結構設計緊湊,但是在遠距離的控制上就比較困難,抓取的空間較小。
▍ 未來十年或增長三倍 2030年機器人靈巧手全球市場規模有望突破30.35億美元
知名資料庫Statista預測,全球機器人靈巧手2021年市場規模約為11.6億美元。而市場目前對於靈巧手需求旺盛,包括典型工業自動化場景、航天及危化領域、醫療保健等領域。Statista預測,全球機器人靈巧手市場規模將由 2021年的11.6億美元增長至2030 年的30.35億美元,2022-2030年間CAGR 為10.9%。同時,全球機器人靈巧手市場容量將由2021年的50.75萬只增長到2030年的141.21萬只,2022-2030年間CAGR為11.7%。
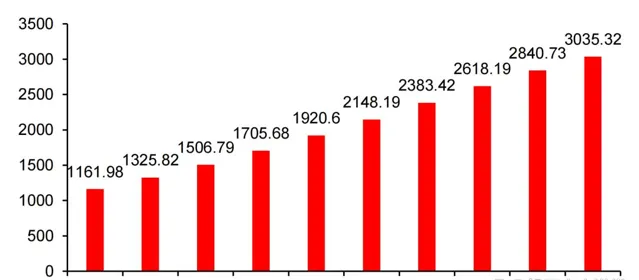
2021-2030E 年全球機器人靈巧手市場規模預測(單位:百萬美元)
目前已有部份靈巧手產品進入早期探索階段,包括航天飛行器的艙外任務、仿生假肢和遠端手術、拼裝流水線上小尺寸零件等。

美國NASA Robonaut機器人搭載自研靈巧手
航天探索方面,目前比較成功的案例有美國 NASA(美國航空航天局)的 Robonaut 手和 Robonaut2 靈巧手、德國 DLR(德國宇航中心)的 DLR-I 和 DLR-II 靈巧手等。DEXHAND 應能夠抓住掌握太空行走(EVA)工具,並支持它們的操作:如鉗子、剪刀、小型切割器、刷子、錘子、鏟子、切割器、纜繩(多個)、內六角扳手和手槍握持的自動螺絲刀(並支持其扳機切換機制)。
醫療康復領域,主要集中在假肢需求,目前市售的高自由度、高效能仿生假肢手,通常使用基於模式辨識的控制系統來實作多自由度假肢手關節的運動控制例如Ottobock 公司的SensorHand Speed、Bebionic 和Michelangelo靈巧手,以及Open Bionics公司的Hero Arm等。
▍ 國內四家頭部靈巧手企業及產品一覽:
騰訊Robotics X實驗室TRX-Hand靈巧手
騰訊Robotics X實驗室2023年4月推出旗下自研機器人靈巧手TRX-Hand和機械臂 TRXArm,得益於創新的剛柔混合驅動專利技術和自研高功率密度驅動器 TRXHand 兼具高靈巧和高負載速度的特性,擁有8個可獨立控制關節,自重僅1.16 千克,最大持續指尖力可達15牛,最大關節速度不低於600 度每秒,可輕松應對不同形狀尺寸物體的抓取和操作,對高動態的拋接動作也遊刃有余。

騰訊Robotics X實驗室TRX-Hand靈巧手
在感知能力上,靈巧手在指尖、指腹和掌面均覆蓋了自研的高靈敏度柔性觸覺傳感器陣列,掌心處安裝有微型雷射雷達和接近傳感器,同時每一個關節均整合了角度傳感器,保證靈巧手在抓取和操作過程中能準確地感知自身與物體狀態資訊。
因時機器人靈巧手:Rp6BFX/Rp6DFX系列靈巧手
因時機器人旗下靈巧手擁有兩款靈巧手系列產品,其中Rp6BFX系列靈巧手又稱鋼琴手,速度快、抓握力稍小,整合力傳感器,適用於彈鋼琴及手勢互動等場景。

Rp6DFX 系列靈巧手抓握力大,速度適中,適用於機器人或假肢的抓取操作。值得一提的是,兩者均支持ROS系統,提供專門的ROS外掛程式,這使得這兩款靈巧手更容易與其他機器人元件和系統整合。
智元機器人SkillHand靈巧手
今年8月,智元機器人舉辦了2024新品釋出會,釋出了「遠征」與「靈犀」兩大系列共五款商用人形機器人新品——遠征A2、遠征A2-W、遠征A2-Max、靈犀X1及靈犀X1-W。其中全新升級的SkillHand靈巧手自由度數躍升至19個,主動自由度升至12個,並引入基於MEMS原理的觸覺感知和視觸覺感知技術。高精度力控7自由度雙臂,能精準執行阻抗控制、導納控制、力位混控等多種力控任務,也支持雙臂拖拽示教模式和視覺化調節。
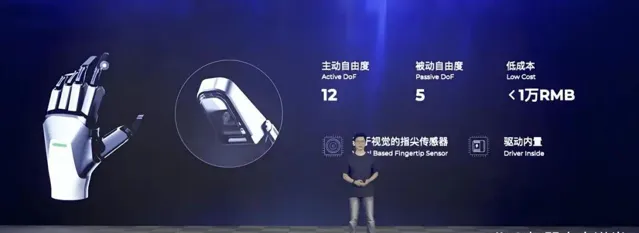
值得一提的是,SkillHand的指尖整合了基於視覺的指尖傳感器,可以分辨操作物的顏色、形狀、材質,而且可以基於演算法的數據融合,做到近似觸覺的壓力傳感器的效果。同時,該靈巧手創新的指尖傳感器視覺閉環的設計,可以實作末端的視覺閉環,降低了對於整機電機的精度需求。
帕西尼Dexp GEN1、Dexp3 GEN2靈巧手
帕西尼感知科技旗下擁有兩款靈巧手,分別為Dexp GEN1和Dexp3 GEN2,其中帕西尼Dexp GEN1靈巧手搭載了數百個觸覺傳感單元和先進的人工智慧演算法,使其能夠像人手一樣自主實作各類常見操作。
帕西尼Dexp GEN1靈巧手
Dexp GEN1的手指表面配備了自研高精度三維力傳感器,精度可達0.01N,確保了精準控制握持力。其負載能力高達5Kg,滿足大部份工作環境要求。此外,Dexp GEN1的手指采用三段結構,彎曲角度與人手自然彎曲角度近似,更加符合人類生產需求。
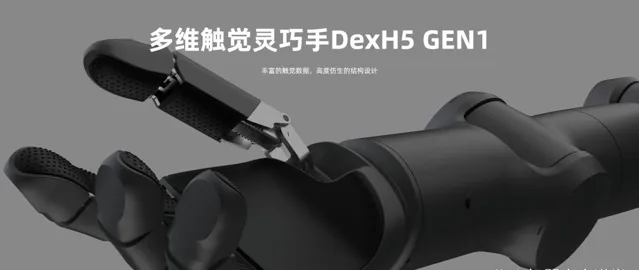
Dexp3 GEN2則是市場上首款融合多維觸覺與AI視覺雙模態能力的四指仿生靈巧手,該靈巧手搭載了世界上最多的1956顆專業級ITPU多維觸覺傳感器,同時Dexp3 GEN2還整合了800萬高畫質AI手眼相機,結合先進的零樣本位姿估計視覺演算法,使其具備了卓越的AI視覺物體位姿估計能力。

帕西尼Dexp3 GEN2靈巧手
在自由度設計上,Dexp3 GEN2采用了高度靈活的結構,實作了13個自由度,不僅能夠實作精細夾取、重物托舉等操作,還能完美模擬人手的抓取、旋轉、拿捏等復雜動作。其觸覺傳感器可在1000Hz采樣頻率下測量法向力、摩擦力等15種觸覺資訊,全量程內保證0.01N的高精度。











