時而蜷縮成球,時而伸展成條
仿照阿米巴蟲
自如地進行變形運動
獨特的軟體機器人
實際是李振坤團隊科研成果
新型磁控觸變材料與軟體機器人
2024年6月,第18屆北京發明創新大賽揭曉,由李振坤負責的新型磁控觸變材料與軟體機器人計畫榮獲金獎。

磁控4D打印與軟體機器人成果獲得
2024全國發明展覽會與北京發明創新大賽金獎





如今,中關村論壇的常設展廳內,李振坤團隊的4D打印與流變機器人正在不斷地展示著它的神奇魅力。
流變機器人的真面目???
流變機器人,簡單來說,是透過運用4D打印技術生產出的軟體機器人,具有極高的靈活性與適應力,「流變機器人」是李振坤團隊首次提出的原創科學概念。
「軟體機器人最理想的軟體形式其實是液體流動,科幻作品中就有很多液體機器人的形象,比如「終結者」、「毒液」等,但是這類液體機器人由於缺少仿生原型,使其難以對自身狀態進行感知和有效調控,無法拓展到實際套用。」我們團隊根據自主研發的磁控流變記憶材料在2023年發表的一篇論文中在全世界首次提出了流變機器人(Rheobot)的概念,流變機器人仿生物件是單細胞生物,例如阿米巴蟲。」李振坤介紹到。




李振坤首次在國際上提出流變機器人概念
李振坤透過材料的磁控溶膠-凝膠轉化特性賦予流變機器人變化自己剛度的能力,就像電影中的毒液一樣,將自己的身體部份隨心所欲地延伸、塑形成武器、裝備等各種物體,能夠無限變形。這一概念的提出,打破了人們對軟體機器人就是利用柔軟材料模仿章魚等生物身體柔軟性的刻板印象,未來軟體機器人有望實作科幻電影裏面描述的液體機器人的強大功能。
李振坤團隊采用4D打印制作的全球第一個流變機器人
怎麽制作「毒液款」流變機器人?
在近幾年的科技領域中,軟體機器人領域正逐漸嶄露頭角。但受限於材料和技術的瓶頸,其發展一直難以取得突破性進展。傳統的軟體機器人大多依賴於彈性材料的變形,但其變形方式相對固定,難以適應復雜多變的環境。因此,如何解決變形受限,將理論概念變為流變機器人實體,成了不可避及的問題。
在一次國際學術會議上,李老師了解到了4D打印技術的潛力:4D打印技術能夠使物體在受到外界刺激時能夠自動變形,從而實作了從設計理念到實物的無縫對接。這一技術啟發了李振坤老師,他意識到,如果將4D打印技術與軟體機器人相結合,或許能夠解決軟體機器人變形受限的問題。
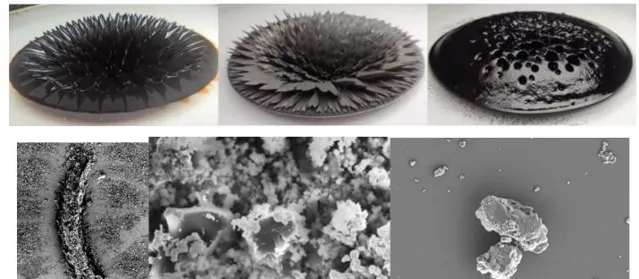
李振坤團隊自主研發的磁控流變記憶材料
然而這並非易事,首先面臨的是材料選擇問題。傳統的智慧材料在響應性和記憶性方面存在諸多不足,難以滿足軟體機器人的需求,因此迫切需要一種新材料,為流變機器人提供柔軟可舒展的「身軀」。「我的靈感來源於小時候常玩的積木遊戲」,談到新材料研發過程時李振坤如此介紹。「基本的功能組分是微奈米尺度的顆粒與層板,我們要解決的是如何讓他們在磁場下自動組裝成需要的結構」,經過前期的計算分析和後期的反復試驗與篩選,他們最終發明出一種磁控流變記憶材料,這種材料不僅對外界刺激具有響應性,而且表現出一定的記憶性,能夠實作溶膠-凝膠過程的可控轉化。

北京交通大學團隊自主研發的Mag 4D系列4D印表機
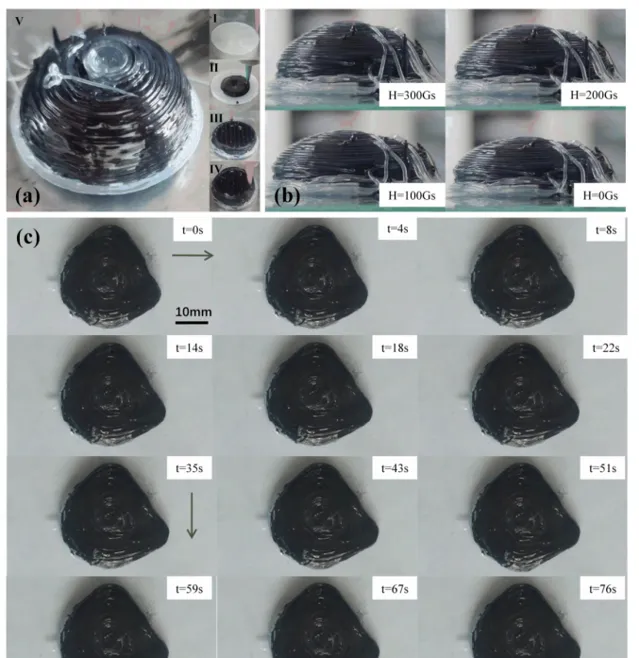
但材料的突破只是第一步,接下來是4D打印工藝的設計和最佳化。要想讓軟體機器人能夠完成復雜變形,李振坤團隊需要開發一種全新的打印工藝,將記憶材料精確打印成具有特定結構的機器人。一邊需要賦予軟體機器人「變形」能力,一邊需要設計機器人特定架構,李老師的團隊經過了無數次的重復嘗試,終於設計出了一種多材料4D打印技術。新技術不僅能夠精確控制材料的分布和形態,並且成功把制作一個軟體機器人過程縮減到10分鐘以內。這與之前制作一個軟體機器人需要5到10個小時相比,無疑是一項巨大的突破。在一個個腳印的積累下,李振坤團隊設計了全球第一款能夠自如進行變形運動的流變機器人。這款機器人采用自主研發的4D打印工藝進行一體化制作,在機器人外部由水凝膠材料制作,相當於單細胞生物的細胞膜,內部由自主研發的新型磁控流變記憶材料制作,透過控制線圈產生的磁場,可以精確控制機器人本體不同部位磁控流變記憶材料的凝膠-溶膠轉化,從而實作機器人的變形運動。
流變機器人的無限可能
科研的最終目的是服務社會、推動產業升級。李振坤深知這一點,他在從事工業與軟體機器人關鍵共性技術與前瞻性技術研究的過程中,始終註重將科研成果轉化為實際套用。他帶領團隊與企業聯合技術攻關,開發研制了包括整體式全同步螺栓拉伸機、新型齒輪軸矯直機、完全解耦串並混線上器人等在內的多套專用工業機器人等智慧裝備。
這些裝備在核電、煤炭等領域的套用中取得了顯著成效,不僅實作了高端自動化裝備國內從無到有的突破,更為相關行業的轉型升級提供了有力支撐。

李振坤研發的煤矸石分選機器人
以完全解耦串並混線上器人為例,其控制系統無需做繁雜的正逆解運算,立方體的工作空間使其作業軌跡規劃變的十分容易,區別於現有的串聯、並線上器人,其在整個工作空間上都有均勻的負載能力,不受位姿影響。該機器人可以廣泛套用於高速度、高剛度、大負載的場合套用,基於該機器人開發的煤矸石分選系統目前已經套用於開灤集團等大中型煤礦,填補了國內該類自動化裝備的空白,該系統由選矸機械手、影像采集和物料排隊裝置組成,為自動化選礦和篩石提供關鍵技術支撐,替代人工8名,每年節約成本48萬元,降低了人工撿煤、煤礦安全生產的風險,更能推動礦山智慧化建設,產生了顯著的社會效益和經濟效益。
李振坤研發的煤矸石分選機器人
基於磁控智慧材料的高精度體素式4D打印技術的問世,解決了智慧結構一體化設計與制造的難題,為軟體機器人的推廣套用註入了新的動力。李振坤與中關村相關企業合作,研發出了全球首台桌面級4D印表機Mag 4D Printer並入選中關村論壇常設展,填補了國內在該領域的空白。利用這一技術,他們制作了多種軟體夾持器,並進一步將磁流變原理引入軟體抓取中,提出了一種變剛度軟體夾持方法,顯著提高了夾持重量與穩定性。這些成果不僅獲得了包括全國發明展覽會金獎、北京市發明創新大賽金獎在內的多項榮譽,更被人民日報、新華社等數十家主串流媒體廣泛報道,引起了社會各界的廣泛關註。



如今,李振坤團隊自主研發的4D打印與流變機器人技術已經取得了顯著的進步。透過4D打印制作的流變機器人不僅具有極高的靈活性和適應力,而且能夠即時感知自身內部材料的分布和流動情況,實作了真正的智慧控制。在未來的套用中,這款機器人將有望在體內治療、軍事偵察、星際探索、智慧穿戴等領域發揮重要作用。
李振坤

李振坤,北京交通大學機電學院教師、九三學社社員、入選2024-2026北京市科協青年托舉人才。
李振坤師從著名磁性液體專家李德才教授。在博士階段,李振坤深入研究工業機器人理論及套用、磁性軟材料流變特性及測量的基礎理論,這些研究為他後續在軟材料3D打印及4D打印、磁控軟體機器人開發等領域的突破奠定了堅實的基礎。2019年,他受邀加入清華大學機械系進行博士後研究。2021年博士後出站,李振坤選擇回到母校北京交通大學任教。
作為4D打印技術的領航者,他帶領團隊發明了基於磁控智慧材料的高精度體素式4D打印技術,並與企業合作研發了全球首台桌面級4D印表機,推動了該技術從實驗室到市場的轉變。此外,李振坤在軟體機器人領域取得了開創性成果,首次提出了流變機器人的概念,並建立了Rheobot實驗室,成為該領域的重要研究基地。他和團隊多次獲得全國性科技獎項,受到主串流媒體的廣泛報道。還積極組織開展並參與公益科普活動,為科普教育貢獻了交大力量。




李振坤組織開展的大型公益科普活動
追求卓越 挺膺擔當
為創新發展貢獻交大力量
來源 | 北京交通大學官方微信
編輯 | 林佳旭
來源:北京交通大學











