2023 年,美國自動駕駛公司 Cruise 在美國舊金山發生交通事故,再次引發人們對自動駕駛安全性和可靠性的討論和擔憂。
多年以來,自動駕駛因有望引起交通範式變革,而引起廣泛的關註。但問題是,自動駕駛何時能大規模商業落地?
對於如何測試和評估自動駕駛的安全性,領域內並沒有形成統一的共識和行業標準。美國蘭德公司研究報告顯示,自動駕駛汽車經過 110 億英裏(約 180 億公裏)的測試後,才有可能達到安全的理想狀態。
這個「百億公裏」難題如果在自然條件下完成,無論環境復雜度還是其他各種因素都充滿挑戰,這也成為制約自動駕駛套用落地的瓶頸難題。
清華大學助理教授封碩總結其背後的科學問題,並提出「連續時空智慧環境測試」的全新思路,創立了「自動駕駛汽車等效加速測試」理論與方法體系,突破片段化場景測試的局限性,為自動駕駛測試的低效率難題提供解決方案。
憑借
首次揭示自動駕駛汽車安全性挑戰背後的科學難題——稀疏度災難,開辟基於生成式人工智慧的安全性加速測試與永續學習框架,將仿真與實車測試速度提高 3 至 5 個數量級
,封碩成為 2023 年度【麻省理工科技評論】「35 歲以下科技創新 35 人」 中國入選者之一。

為解決測試低效率難題提供理論基礎
封碩本科和博士畢業於清華大學自動化系,博士導師為張毅教授。之後 5 年,他作為聯培博士、博士後、助理研究員,在美國密西根大學劉向宏(Henrry X.Liu)教授課題組學習和工作。
隨著博士期間研究的深入,原本從事多智慧車隊控制研究方向的封碩發現,自動駕駛汽車的大規模落地套用面臨巨大的難題,而在解決此難題之前,基於自動駕駛規模化套用的多智慧車研究多數停留在紙面,難以取得實質性進展。
於是,他在博士四年級毅然轉變了學術方向,開始聚焦於自動駕駛汽車的安全性測試問題研究。
並且,按照由簡至繁、逐步深入的研究方法,先後聚焦「單點級」「路段級」與「路網級」測試環境生成問題。
為解決高維問題所帶來的困難,他進一步將場景生成問題表述為一個馬可夫決策過程問題,並開發了一種強化學習演算法,透過評估其情景臨界性來學習臨界行為。
針對單點級單車互動駕駛環境,提出了基於重要性的關鍵度采樣理論,為解決測試低效率難題提供了理論基礎。在此基礎上,提出單點單車測試環境生成方法,顯著加速了單點單車測試過程[1-3]。
相關成果獲得了 2020 年度電氣與電子工程師協會智慧交通系統學會最佳博士學位論文獎(智慧交通領域權威博士論文獎,全球每年僅評選三篇)。
「我與所在課題組從零開始探索自動駕駛測試場景生成,以能夠更好、更快地測試自動駕駛的安全性。在這個研究階段,我們找到了數學工具對自動駕駛安全性進行求解,並初步驗證。」封碩說。
需要了解的是,自動駕駛的測試分兩個階段。第一個階段是片段化場景,主要是門檻性測試。第二階段是時空連續的交通流測試,以挖掘自動駕駛復雜的互動場景下的安全效能。

(來源:密西根大學)
博士後期間,他意識到,當自動駕駛能力越來越高級後,片段化場景就無法滿足自動駕駛安全性的評測。於是,封碩開始研究從理論上推廣到更復雜的場景,面向路段級多車互動駕駛環境。
基於此,他以獨立一作身份,在 Nature Communications 提出了「稀疏對抗采樣」理論,即自然-對抗駕駛環境可以在任何駕駛環境中為測試自動駕駛持續生成測試場景,解決了重要性采樣理論的「維度災難」。
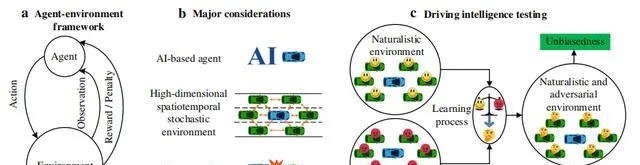
圖丨使用自然-對抗駕駛環境進行駕駛智慧測試(來源:Nature Communications)
在此基礎上,首次提出路段多車測試環境生成方法,顯著提升了連續時空復雜環境下汽車安全性測試能力[4]。
具體來說,由於場景生成的基本輸入來自自然駕駛數據,因此,在測試軌域上的測試裏程可以近似轉換為與道路自然駕駛環境相同的等效裏程。
由於具有挑戰性的場景顯著增加了安全關鍵案例的暴露率,在測試軌域上測試 1 英裏,可能相當於在公共道路上行駛數百甚至數千英裏。
相關論文作為精選文章入選 Nature Communications 「人工智慧和機器學習」專題,並獲得美國運籌學和管理學研究協會「2021 年度智慧交通系統最佳論文獎」。

自動駕駛安全領域在 Nature 正刊發表的首篇論文
2022 年,封碩回到母校清華大學擔任助理教授、博士生導師,研究方向為智慧系統測試驗證。
他針對路網級多車互動駕駛環境,提出了密集強化學習理論,為人工智慧技術在高維空間小機率事件最佳化中所面臨的「稀疏度災難」(Curse of Rarity)提供解決方案。
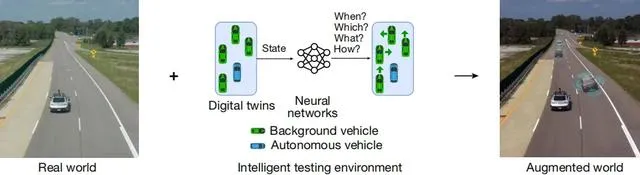
在此基礎上,提出路網多車測試環境生成方法,實作了測試環境的智慧化生成,透過智慧環境與自動駕駛之間的「AI Against AI」方法[5]。
該方法顯著提升了大時空尺度下自動駕駛汽車安全性測試能力,將測試過程提升 3 至 5 個數量級(1000 倍至 10 萬倍)。 有望大振幅降低自動駕駛測試與研發成本,加速推動其落地套用的速度。

圖丨Nature 當期封面(來源:Nature)
自動駕駛公司 Google/Waymo 評價該研究「加速了系統驗證過程」「顯著降低了所需要的測試裏程」。
在該研究中,透過密集深度強化學習方法,允許神經網路透過安全攸關事件從密集資訊中學習,並實作傳統深度強化學習方法難以完成的任務。該方法的優越性在理論上得到了證明,並透過在高速公路測試軌域上測試高度自動化的車輛。
(來源:Nature)
2023 年 3 月,相關論文作為封面論文,以【基於密集強化學習的自動駕駛汽車安全性測試】(Dense Reinforcement Learning for Safety Validation of Autonomous Vehicles)為題發表於 Nature 。
封碩是第一作者,密西根大學劉向宏教授擔任通訊作者。據悉,是自動駕駛安全領域在 Nature 正刊發表的首篇論文。

圖丨相關論文(來源:Nature)
「AI Against AI」的全新理論與方法,有望形成新一代機器智慧的測試與研發範式,對安全攸關系統的大規模落地套用產生巨大影響力,包括自動駕駛、航空航天、醫療機械、智慧核電、智慧電網等。
封碩表示,基於該研究,未來用 AI 幫助 AI 有可能形成一種教學相長的過程。其中一個 AI 是教練,另一個 AI 是學生,需要二者互相促進來提升能力。
真實交通環境中事故非常罕見,人類事故率一般在 10-6 甚至更低,如何高精度建模這種長尾小機率事件一直是領域的難點。封碩與合作者利用生成式的方法產生高精度自然駕駛環境,讓智慧測試環境更接近真實[6]。
封碩表示:「透過一系列研究我們發現,自動駕駛安全性測試和安全性訓練就像一個硬幣的兩面。如果不知道演算法的安全性和量化效能,就不知道演算法是否提升,也就不知道如何提升安全性。」

將積極探索高價值數據生成方向
封碩表示,走上科研道路,離不開學校的引導、兩位導師的言傳身教和家人的支持。
他說:「張毅教授鼓勵我作為聯合培養博士,幫助我開拓全新的博士課題;在我回國任教後,支持我建立自己的實驗室。而劉向宏教授則‘手把手’帶我走進自動駕駛領域。」
讓封碩印象最深刻的是「完全沈浸式」的論文撰寫模式,他曾連續 3-5 天在辦公室與劉教授面對面地撰寫和修改論文,並透過沈浸式思考和討論,來提升對問題的認識和理解。該方法效率極高,也成為封碩階段性的工作模式。

圖丨封碩在中國科技青年論壇(來源:封碩)
目前,自動駕駛汽車商業化「姍姍來遲」進入到 L3 時代,然而 L3 無法根本性改變交通格局。封碩認為,現階段距離自動駕駛安全效能到大規模商業 L4 乃至 L5 的落地,大約還有 1 到 2 個數量級的差距。
他表示,自動駕駛領域沒有達到預期的發展進度,根本原因是存在尚沒有解決的關鍵科學難題,而突破這些難題僅靠產業的力量是不夠的,需要學術界的共同努力。
另一方面,產業的發展也需要監督,安全性是涉及人類社會的大事,隨著 AI 技術發展的突飛猛進,AI 安全性問題的重要性也日益凸顯。
「作為該行業的科研工作者,要爭取先於產業洞察這些潛在的行業瓶頸,提前布局開展學術研究,為產業發展掃清障礙。」他說。
目前,封碩正在推進相關技術的產業化落地。依托交通大數據與大模型技術,構建面向自動駕駛安全性測試與訓練的交通行為大模型,以實作高保真、強互動、大時空尺度的交通行為仿真。
其關註的場景包括:透過生成智慧測試交通環境,加速自動駕駛汽車安全性仿真測試;透過生成高價值訓練數據和密集學習演算法,加速自動駕駛訓練效率。
現階段,特斯拉透過實際采集方式收集自動駕駛數據,但需要了解的是,其中只有萬分之一是有價值的數據。最近,構建端到端的能力成為廣泛討論的話題。
「如果沒有高價值數據生成,很難讓自動駕駛的整個系統轉起來,所以這也是我們未來將重點研究的方向,希望能夠加速自動駕駛 L4/L5 時代的到來」
談及研究中的創新要素,封碩認為,不過於留戀「低垂的果實」。研究如同深山尋寶,當取得一定突破後,不急於「安營紮寨」,而是要勇於繼續上路,再出發深入「無人區」,努力去探索最後的寶藏。
參考資料:
1.Feng, S., Feng, Y., Yu, C., Zhang, Y. and Liu, H.X., 2020. Testing scenario library generation for connected and automated vehicles, Part I: Methodology. IEEE Transactions on Intelligent Transportation Systems, 22(3), 1573- 1582.
2. Feng, S., Feng, Y., Sun, H., Bao, S., Zhang, Y. and Liu, H.X., 2020. Testing scenario library generation for connected and automated vehicles, Part II: Case studies. IEEE Transactions on Intelligent Transportation Systems, 22(9), 5635-5647.
3. Feng, S., Feng, Y., Sun, H., Zhang, Y. and Liu, H.X., 2020. Testing scenario library generation for connected and automated vehicles: An adaptive framework. IEEE Transactions on Intelligent Transportation Systems, 23(2), 1213-1222.
4.Feng, S., Yan, X., Sun, H., Feng, Y. and Liu, H.X. Intelligent driving intelligence test for autonomous vehicles with naturalistic and adversarial environment. Nature Communications , 12, 748(2021). https://www.nature.com/articles/s41467-021-21007-8
5.Feng, S., Sun, H., Yan, X. et al. Dense reinforcement learning for safety validation of autonomous vehicles. Nature 615, 620–627 (2023). https://doi.org/10.1038/s41586-023-05732-2
6.Liu, H.X., Feng, S. Curse of rarity for autonomous vehicles. Nature Communications 15, 4808 (2024). https://doi.org/10.1038/s41467-024-49194-0
營運/排版:何晨龍











