多機器人的運動規劃是個有挑戰性的課題。眾多機器人同處於同一個空間,要在運動學和編隊約束條件下,實作高效計算,實作多機器人到達目的地,並避免相互碰撞。
來自哈爾濱工業大學的研究團隊提出了一種新穎的集中式軌跡生成方法,並利用NOKOV度量動作捕捉系統在真實實驗中驗證了演算法的效率、適應力和可延伸性。論文被IROS2021收錄。

演算法原理
多機器人運動規劃方法可以分為兩大類:
分布式方法透過鄰近機器人之間的局部互動來實作群體行為,對通訊的要求低、可延伸性強。然而很難在個體或系統層面施加約束。
相比之下,集中式方法能提供全域保證,並能合理地設定約束條件,但隨著機器人數量的增加,它們的擴充套件性往往很差。
研究團隊將著名的運動規劃方法GPMP2擴充套件到多機器人場景,采用稀疏高斯過程模型,高效地計算多機器人運動軌跡。
透過添加隊形約束條件,多機器人編隊可以自適應地透過不斷變化的地形。並提出一種增量重規劃演算法,使用貝葉斯樹的數據結構來更新運動軌跡,實作快速的線上操作。
實驗過程
研究團隊用一組四旋翼飛行器測試了演算法框架。
實驗在三種常見場景中進行,分別是:保持隊形、為改變目的地重新規劃,以及在寬度變化的空間中透過時自適應變換隊形。
一組Crazyflie奈米四旋翼飛行器在NOKOV動作捕捉系統的監控下進行了實驗。飛行器透過CrazyRadio PA接收來自NOKOV動作捕捉系統的資訊,以進行定位。

實驗1+實驗2:保持隊形、改變目的地重新規劃
在實驗1中,4架四旋翼機保持方形隊形飛向目標,同時避開障礙物。四旋翼機編隊在必要時會做出取舍,編隊在轉彎時有輕微的扭曲,但可以實作更平穩的轉彎。
在實驗2中,四旋翼機編隊飛向原始目標途中,突然改變目標點。在t = 7s時將目標點向與原始目標相反的方向移動。增量重規劃演算法在4ms內將軌跡更新到新目標,滿足即時性要求。
實驗3:在寬度變化的空間中自適應變換隊形
6架四旋翼機在2.5m、1.5m、3.5m三種不同寬度的空間中透過。全域規劃演算法計算出的不同隊形和執行時間間隔為:(i) 1s−2s: 3×2排列;(ii) 4s−7s: 2×3排列(iii) 9s−10s: 6×1排列。

此外,在四重地圖上實作了10架四旋翼機透過寬度分別為:4m、2m、7m的空間。對應的編隊配置為:(i) 1s2s: 5 ×2;(ii) 4s7s: 2 ×5;(iii) 9s10s:

演算法執行時間
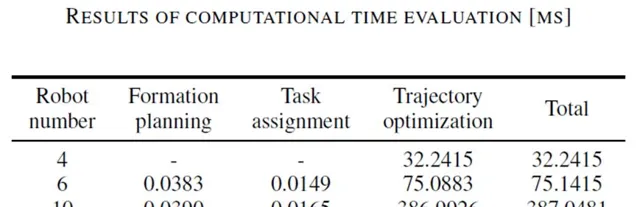
該演算法能在 0.39 秒內計算出 10 架四旋翼機的完整軌跡,並能進行編隊變化,這對於如此復雜的任務來說是非常高效的。
參考文獻:
Guo S, Liu B, Zhang S, et al. Continuous-time Gaussian Process Trajectory Generation for Multi-robot Formation via Probabilistic Inference[C]//2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2021: 9247-9253.
原文連結:https://blog.csdn.net/MocapLeader/article/details/136211639











