軟體機器人,通常由具有類似皮膚和肌肉組織柔韌性和順應性的材料構成,可透過形變有效吸收碰撞中釋放的大部份能量,展現出超強的適應力、靈敏度和敏捷性。
憑借其材料模量與人體自然組織高度相容的天然優勢,軟體機器人尤其適用於可穿戴和植入式套用。
然而,要充分挖掘其潛能,必須實作傳感、驅動、控制、能源供應及通訊等核心元件的無縫整合。
▍開發更先進可穿戴與植入式軟體機器人,難點有哪些?
對於可穿戴和植入式軟體機器人,裝置的尺寸與侵入程度往往是設計的關鍵。
一般而言,較小的尺寸可以帶來更好的便攜性,但同時也對設計、制造、控制提出了更高的復雜性要求,並受到能源供應的限制。
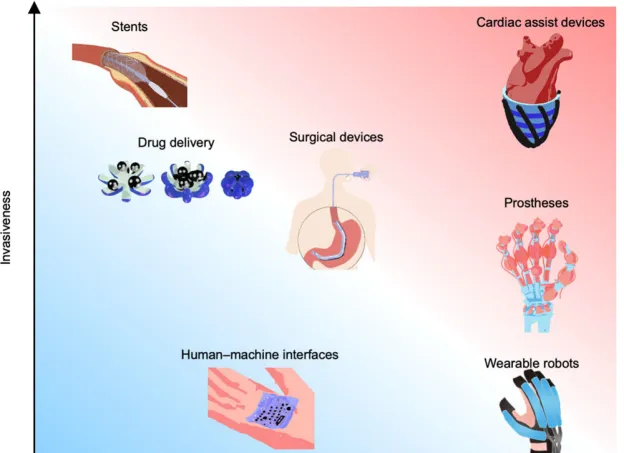
圖1 不同型別的可穿戴和植入式軟體機器人在規模和侵入性方面的差異比較
降低侵入性,可以提升使用者的舒適度,並減輕手術等套用的復雜度和潛在風險,但對裝置的小型化及材料的化石相容性提出了更高要求。
因此, 更先進可穿戴與植入式軟體機器人的開發,在很大程度上依賴於設計、制造、控制、電源和材料等方面的創新。
那麽,當前這一領域的具體進展如何呢?
近日,來自 加州理工學院高偉教授課題組的研究人員就可穿戴和植入式軟體機器人的最新發展進行了深入研究。
聚焦於康復、輔助、器官模擬、手術輔助及治療等多元化套用領域,該研究團隊不僅深入討論了當前軟體機器人行業面臨的復雜制造工藝、響應性材料整合以及穩健控制策略的需求等挑戰,還重點介紹了材料科學、驅動與感知機制以及制造技術的最新進展。此外,他們還展望了軟體機器人在醫療健康領域的廣闊前景,剖析了關鍵挑戰,並提出了潛在解決方案。
圖2 論文發表相關資訊
該研究的相關論文成果已以「【可穿戴和植入式軟體機器人】(Wearable and Implantable Soft Robots)」為題發表在美國化學學會(ACS)旗下的【Chemical Reviews】期刊上。 論文第一作者為加州理工學院博士生銀樹焜和Dickson Richard Yao,通訊作者為加州理工學院醫學工程系教授高偉。
▍軟體機器人技術綜述:驅動機制、材料與制造技術的最新進展
從微創手術的精確微運動到康復裝置的強力處理,執行器作為軟體機器人的核心,能夠助力其實作多種功能。
合適的執行器對於軟體機器人的制造復雜性、傳感精度、控制精度等多個方面具有重要影響。
文章中,該研究團隊對軟體機器人的驅動機制、關鍵材料以及先進制造技術進行了全面的綜合研究,並詳細介紹了其執行原理、優勢和局限性。
驅動機制
軟體機器人的驅動機制是其實作復雜運動和功能的核心。 目前,多種驅動機制已被開發並套用於軟體機器人中,包括但不限於氣動/液壓彈性體、磁性彈性體、牽引線驅動、介電彈性體、液晶彈性體、形狀記憶聚合物和凝膠等。
這些驅動機制各有特色,如氣動/液壓彈性體以其簡單性和產生巨大力量的能力著稱,而磁性彈性體則能實作遠端和精確控制。牽引線驅動系統則模仿生物體的自然運動機制,具有高抗拉強度和輕質結構的特點。介電彈性體響應電刺激快速變形,而液晶彈性體則對溫度和光等刺激敏感,展現出可逆、可控的驅動特性。形狀記憶聚合物和凝膠則分別透過外部刺激和自身特性實作形狀變化和驅動。
關鍵材料
軟體機器人的材料選擇對其效能具有決定性影響。 理想的軟體機器人材料應具備高靈活性、高強度和耐用性,同時保持良好的化石相容性。目前,矽樹脂、聚氨酯和水凝膠等材料因其獨特的機械效能和適用場景而被廣泛套用於軟體機器人中。矽樹脂以其出色的機械效能和耐用性成為氣動/液壓和介電彈性體執行器的首選材料;聚氨酯則因其高抗拉強度和耐磨性在更強大的套用場景中表現出色;水凝膠則因其高含水量和化石相容性在生物醫學套用中展現出巨大潛力。
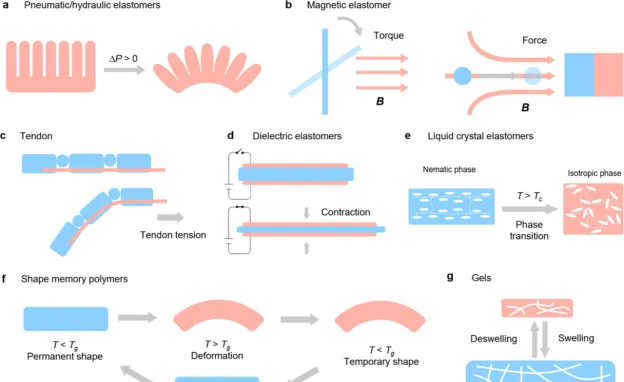
圖3 按材料型別分類的軟體機器人驅動機制
制造技術
制造技術的進步對軟體機器人的發展至關重要。 傳統制造工藝難以滿足軟體機器人對高空間分辨率和復雜材料排列的需求,因此減材制造、成型制造和增材制造等技術應運而生。其中,3D打印技術以其按需數位化制造復雜結構的能力,在軟體機器人制造中展現出巨大優勢。多材料3D打印技術更是透過高空間和成分精度整合不同材料,增強了打印物件的復雜性和功能性。這些先進的制造技術為軟體機器人的發展提供了有力支撐。
最新進展
盡管軟體機器人在多個領域展現出巨大潛力,但其發展仍面臨諸多挑戰。例如,如何進一步提高軟體機器人的驅動效率、響應速度和穩定性;如何開發更具化石相容性和耐用性的新材料;以及如何最佳化制造工藝以降低成本並提高生產效率等。
▍軟體機器人感知方法:外部傳感、本體傳感與多模態融合
軟體機器人作為新興技術,其感知能力的提升對於實作更高級的功能至關重要。由於軟體機器人的順應性和形態特點,傳統傳感器如編碼器、金屬或半導體應變計及慣性測量單元(IMU)難以直接套用。因此,開發適應軟體機器人特性的感知方法成為研究熱點。
文章中,該研究團隊對外部傳感和本體傳感、溫度傳感、生物化學傳感、電生理傳感以及多模態傳感等幾種常用的軟體機器人感知方法進行了分析介紹。
外部傳感與本體傳感
外部傳感和本體傳感是軟體機器人感知環境及自身狀態的重要手段。 外部傳感器收集環境資訊,如壓力、應變和溫度,而本體傳感器則監測機器人內部的變形情況。 這些傳感器與執行器協同工作,使機器人能夠智慧地解釋環境刺激並調節其動態,實作快速響應和精確任務執行。例如,整合觸覺傳感器的軟體手套能夠分解復雜的抓握特征,為機器人提供觸覺感知能力,進而增強其抓握和操縱能力。
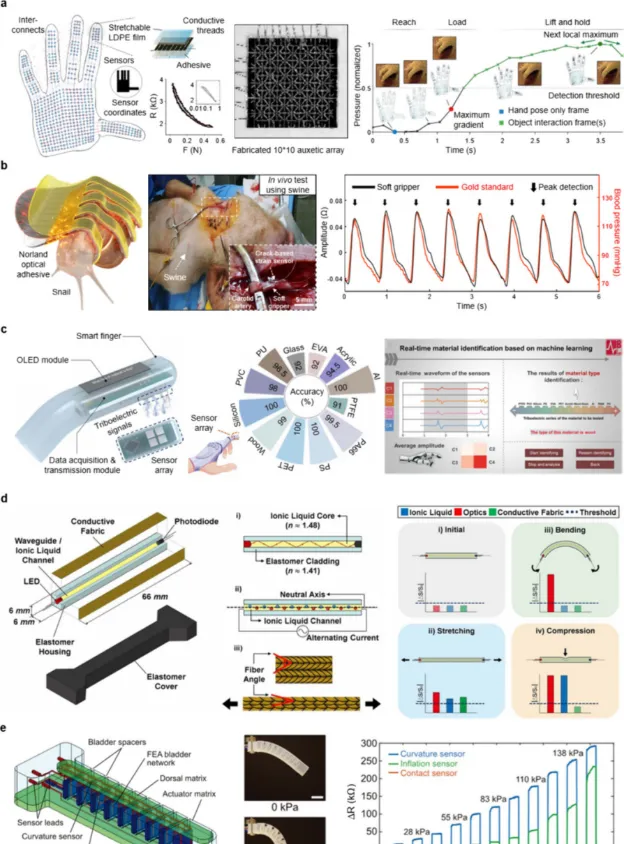
圖4 軟體機器人的外部傳感和本體傳感
溫度傳感
溫度傳感在軟體機器人技術中扮演著關鍵角色,它 使機器人能夠精確控制、監測環境變化並增強安全性。 透過采用熱電偶、電阻溫度檢測器和紅外傳感器等技術,軟體機器人能夠準確測量周圍環境和自身結構內的溫度變化。這些傳感器需具備高靈敏度、快速響應和長期穩定性,以適應軟體機器人表面的各種運動和變形。溫度傳感在醫療診斷、環境監測和工業自動化等領域展現出廣闊的套用前景。
生化傳感
生化傳感能夠提升軟體機器人的感覺、診斷和治療功能,透過感知化學資訊並與之互動,為軟體機器人帶來革命性變化。 例如,利用工程細菌開發的軟體機器人夾持器能夠即時檢測和反饋環境中的化學物質,為環境監測和汙染檢測提供新途徑。此外,模仿人類味覺和嗅覺的生化傳感技術也在不斷發展,為食品品質控制和機器人決策提供了有力支持。
電生理傳感
電生理傳感使軟體機器人能夠透過利用和解釋電訊號與人體和環境建立聯系,可用於進一步探索醫療保健和康復等領域的生物醫學套用。 例如,可穿戴EEG紋身電子裝置能夠即時增強大腦-AI閉環系統的機器決策能力,而3D打印的折紙幹電極則無需導電凝膠或粘合劑即可實作心電圖監測。這些技術為機器人提供了更自然、直觀的互動方式,增強了其在醫療和人機協作中的能力。
多模態傳感
多模態傳感將不同的傳感模組整合到軟體機器人平台中,實作了對多種環境刺激的同步感知和綜合分析。 例如,整合觸覺、溫度和壓力傳感器的可拉伸假肢皮膚能夠為使用者提供高度局部的機械和熱皮膚樣感知,而具有全打印多模態傳感功能的軟體電子皮膚則可用於電生理記錄、觸覺感知和危險物質檢測。多模態傳感技術為軟體機器人提供了更全面的感知能力,使其在復雜環境中表現出更高的智慧和適應力。
目前,軟體機器人的感知方法正朝著多元化、整合化和智慧化的方向發展。透過外部傳感、本體傳感、溫度傳感、生物化學傳感和電生理傳感等多種手段的綜合運用,軟體機器人將能夠更準確地感知環境變化和自身狀態,實作更高級的功能和更廣泛的套用。
▍軟體機器人在醫療健康領域的未來展望與挑戰
軟體機器人在醫療健康領域的未來發展充滿機遇,但也伴隨著挑戰。目前軟體機器人在醫療健康領域正經歷著變革性進步,但同時也面臨著一系列挑戰。
驅動機制、材料與制造技術的創新
未來,軟體機器人的驅動機制將更加高效和多功能,生物混合致動器等創新技術將融合活體組織與非生物材料,創造出適應力更強、反應更靈敏的系統。
同時,新型執行器的開發將提高運動控制的精確性和效率。
在材料方面,兼具靈活性、強度、化石相容性和環境響應性的新興材料將為軟體機器人與生物組織的無縫互動提供可能。液晶彈性體和水凝膠等材料的進步將顯著提升軟體機器人的變形能力和環境適應力。
此外,先進的制造技術如3D打印、軟光刻和卷對卷處理將推動軟體機器人的規模化生產,並保持其精度和可重復性。
軟體機器人的智慧化發展
軟體機器人的智慧化是其未來發展的關鍵方向。
未來的軟體機器人將具備多功能性和可重構性,能夠自主執行、處理不可預測的情況並執行復雜任務。整合傳感器陣列和高分辨率傳感器將提高軟體機器人的感知能力,使其能夠即時監測生理參數並響應環境變化。
同時,機器學習和神經網路的套用將使軟體機器人具備即時決策和自適應控制能力。具身人工智慧的原則將指導軟體機器人系統的設計,使其能夠在動態和復雜環境中實作生物啟發的人工智慧。
能源與永續性挑戰
能源效率與永續性是軟體機器人長期執行的關鍵挑戰。
未來研究將致力於開發高效、輕便、緊湊的電源解決方案,如生物燃料電池和柔性電池,以提供持續電力並保持軟體機器人的靈活性和化石相容性。
同時,提高執行器和傳感器的能源效率將延長軟體機器人的使用壽命並減少對外部電源的依賴。此外,開發永續材料以減少對環境的影響也是未來研究的重要方向。











