軟機器人相比傳統剛性機器人具有顯著優勢,其柔性和適應力使其能夠執行各種復雜任務。但軟機器人的制造和整合過程卻是一項復雜的任務,目前,軟機器人的制造大多依賴於手工組裝,這不僅增加了制造時間,還降低了制造的一致性,尤其是在小型化軟機器人的設計方案上尤為明顯。此外,軟機器人的非線性、滯後和黏彈性行為也使其建模和控制變得更為復雜。
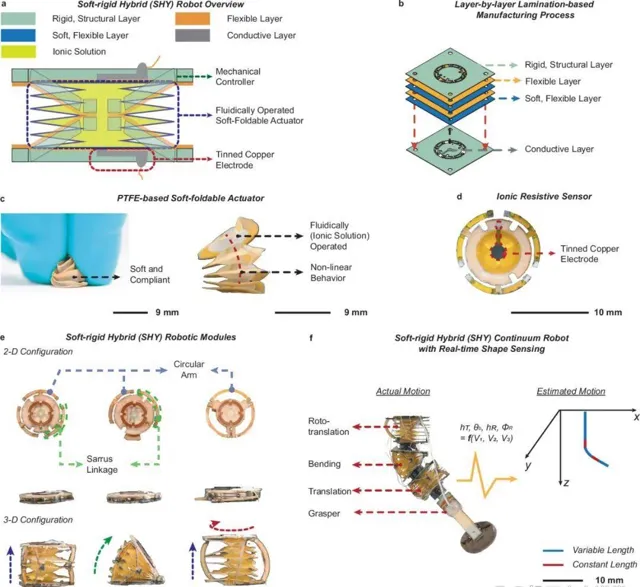
SHY機器人結構圖一覽
為了解決軟機器人在設計過程中的難題, 近日波士頓大學的研究團隊在【Nature Communications】上發表了一項創新研究,提出了一種可延伸的單片式制造方法,用於制造公釐級軟剛混合(SHY)機器人, 該方法簡化了核心硬體元件的整合,並展示了機器人在物體抓取、針頭引導和光纖引導等任務中的套用潛力。
▍ 軟剛混合機器人材料選擇與設計方案
在材料的選擇與設計方面,波士頓大學的研究團隊表示,該團隊設計的軟剛混合機器人(Soft-Rigid Hybrid Robots,簡稱SHY機器人)采用了多種不同性質的材料,包括剛性材料(如纖維增強環氧樹脂層壓板)、柔性材料(如聚酰亞胺薄膜)、軟性材料(如聚四氟乙烯,PTFE)和導電材料(如銅薄膜),並透過光精密微加工和氫(H₂)電漿表面改性技術進行預處理,方便後續粘合。
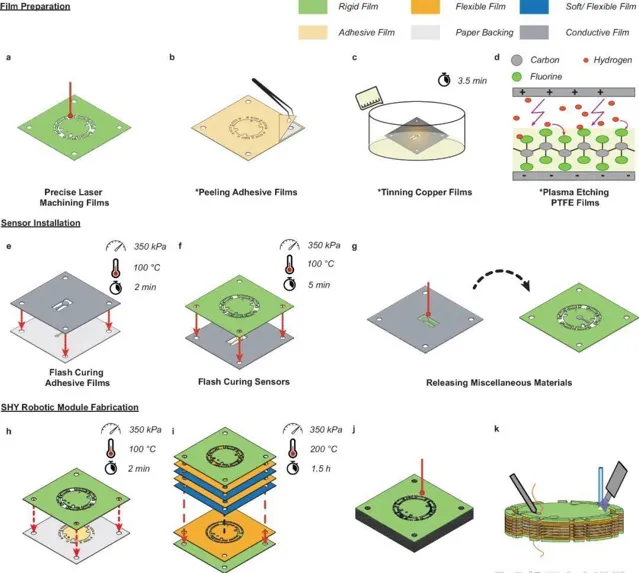
SHY機器人的制造過程
在制作上,研究團隊首先采用二極體泵浦固體雷射器對各種薄膜材料進行精確切割,形成所需的形狀和尺寸。之後對PTFE薄膜進行H₂電漿處理,以改變其化學性質,增加其親水性,從而使其能夠與粘合劑薄膜有效粘合。這一過程透過氫自由基與氟原子結合,形成氫氟酸,導致PTFE表面性質的變化。
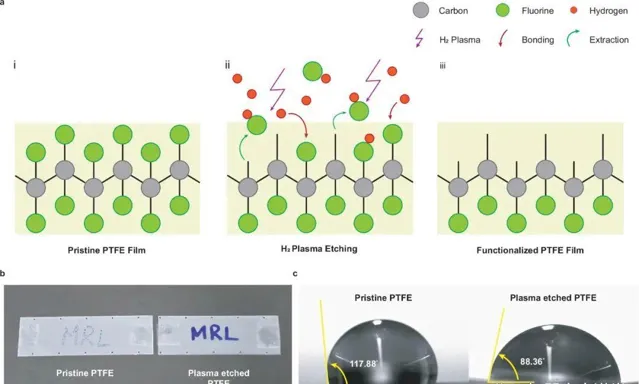
使用氫電漿改變PTFE薄膜的特性
研究人員表示, 單片整合制造方法的核心在於透過層疊技術將各種材料無縫結合,形成完整的機器人結構。 在粘合過程當中,研究人員透過雷射加工去除粘合劑薄膜的部份背紙,以便在特定位置進行粘合。
之後將導電銅薄膜鍍錫以防止腐蝕,並透過熱壓將其暫時固定到結構層上。接著,將所有粘合劑薄膜轉移到其他薄膜上,並對齊堆疊,透過高溫高壓進行永久粘合。
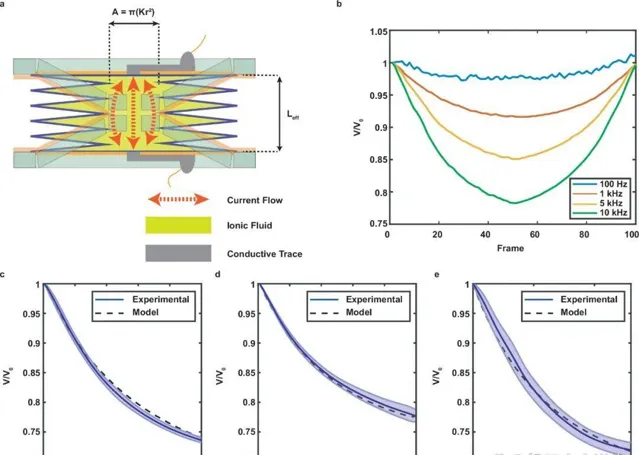
SHY機器人傳感器建模和特性
在制造過程中,研究人員透過嵌入銅電極並在機器人內部形成電路,實作了離子電阻傳感器的整合。該傳感器能夠檢測機器人體內的電阻變化,從而能夠即時感知機器人的運動狀態。
SHY機器人模組的機械特性
值得一提的是, SHY機器人的驅動器由一系列基於PTFE薄膜的氣囊組成,這些氣囊在充氣後能夠像氣球一樣膨脹,並根據外部力產生簡單的線性運動。
透過預先設計的剛性連桿和柔性關節對軟折疊驅動器進行約束,SHY機器人能夠實作可控的運動。同時,透過在機器人內部嵌入離子電阻傳感器,機器人能夠自我感知其運動狀態,並透過測量電阻變化來估計機器人的構型。
▍ 三大場景實測SHY機器人復雜任務執行能力
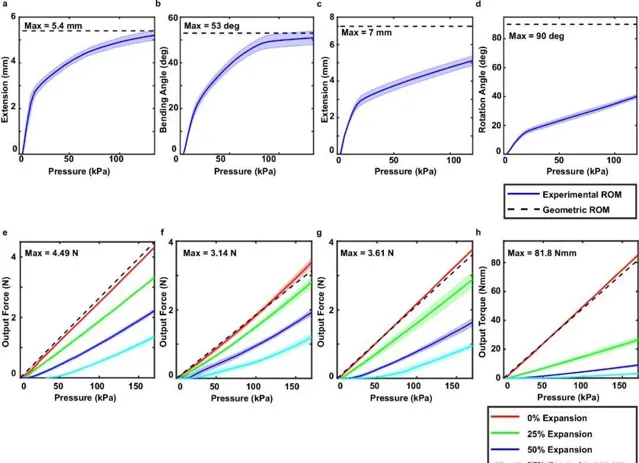
為了驗證SHY機器人在實際場景中的有效性,研究團隊對SHY機器人模組進行了機械效能表征測試。其中包括運動範圍、力和扭矩、功率密度和疲勞測試。結果表明,這些機器人模組在不同的擴充套件狀態下均能產生顯著的輸出力和扭矩,並且具有較高的功率密度。
實際測試場景下,研究團隊構建了一個SHY體機器人,並整合了各種末端執行器,如機械手爪、針頭和光纖。透過執行物體抓取與放置、針頭引導和光纖引導等任務。
SHY機械手執行拾取和放置任務
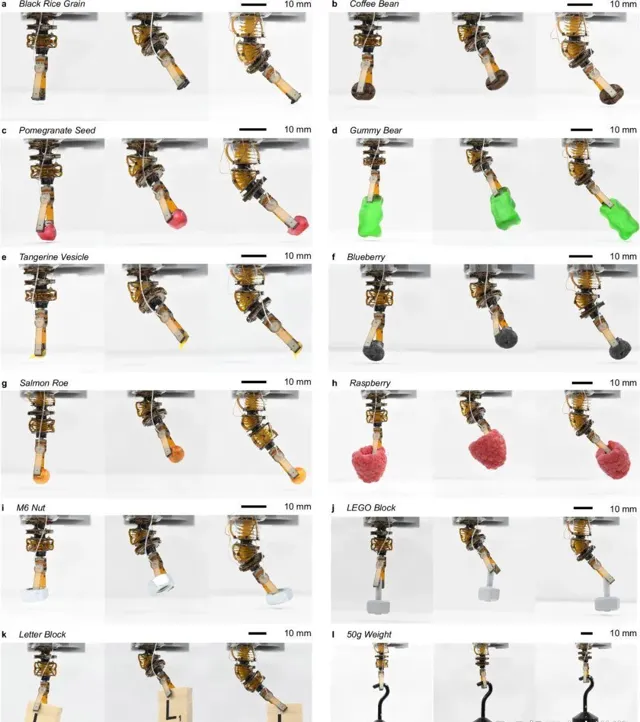
在物體抓取與放置任務中,SHY機器人的末端整合了一個使用相同制造技術制造的機器人抓取器。抓取器由嵌入式聚四氟乙烯(PTFE)軟折疊致動器驅動,透過施加正壓和負壓來實作鉗口的開啟和閉合。而測試物件則包括小型食品顆粒(如黑米粒、咖啡豆、石榴籽、軟糖)、裝配和制造元件(如M6螺母、樂高積木)、日常物品(如字母積木、樂高積木)以及一個50克的重量的物體元件。
實驗結果顯示, SHY機器人成功抓取並移動了所有測試物體,包括比抓取器本身還大的物體(如字母積木)和比機器人自身重25倍的物體(如50克重量)。 此外在抓取和移動柔軟易碎的食品計畫(如橘子囊泡、藍莓、鮭魚卵和覆盆子)時,機器人沒失真壞任何物體。
SHY機器人執行針和光纖操縱任務
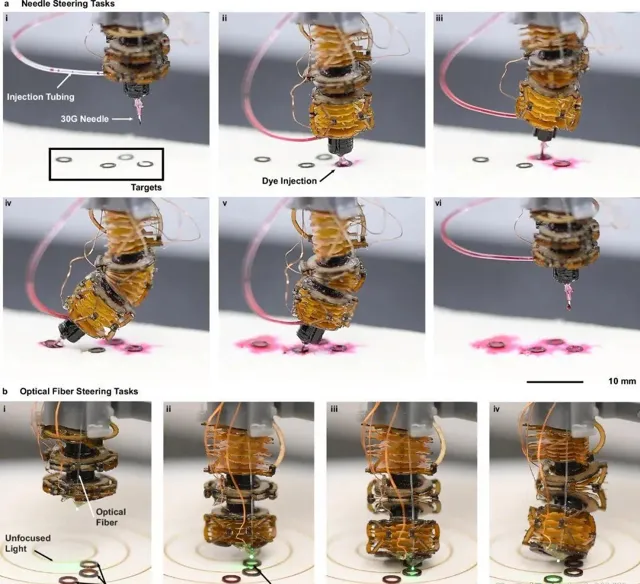
為了模擬醫療活檢和藥物輸送程式,研究團隊展示了SHY機器人在針頭引導任務中的套用。透過在SHY機器人的末端整合了一個30號針頭和內徑為304微米的微管,讓SHY機器人前往四個提前標記好的目標位置。整個實驗過程利用開環控制,機器人朝向每個目標位置導航,根據需要引導針頭末端,將針頭插入組織模擬物中,並進行穿刺,然後註射粉紅色染料以驗證穿刺過程。
實驗結果顯示, SHY機器人能夠施加足夠的力穿透組織模擬器,註射粉紅色染料的過程驗證了其穿刺能力。 這種能力未來能夠有效套用到如微創手術中的組織活檢和藥物輸送任務當中。
此外,研究人員也展示了SHY機器人在醫療程式中的潛在套用(如雷射消融)能力,透過使用綠色LED光模擬雷射,將SHY機器人倒置並朝向目標位置移動。由於雷射在離開光纖時會發散,因此需要將光纖更靠近目標位置以實作聚焦和高功率光輸送。在移動過程中關閉LED光,一旦SHY機器人成功對準光纖與目標,就重新啟用LED光。
實驗結果顯示,隨著SHY機器人光纖接近目標位置,光斑直徑減小,表明聚焦增強。研究人員表示,SHY機器人表現出的這種能力在雷射輔助手術中具有重要意義,其中對光纖位置的精確控制對於成功輸送聚焦雷射和無血組織消融至關重要。
▍ 結語與未來:
波士頓大學SHY機器人為公釐級軟剛混合機器人的制造和套用提供了新的思路和方法。 該方法實作了傳感器與SHY機器人的無縫整合,使得機器人能夠在不同自由度下工作。 相比其他方法,該方法在傳感器整合方面更為靈活和可靠,且適用於多種設計和尺寸的SHY機器人。
值得一提的是, 該方法支持批次制造,能夠在單個制造會話中同時構建多個模組, 能夠提高制造效率和一致性,同時 在機械效能方面表現出色,具有與其他流體驅動軟機器人相當或更優的效能。
研究人員表示,SHY機器人未來仍有改進空間,為了減少系統復雜性,未來可以嘗試透過引入震動閥和流體邏輯來減少管路數量。此外,隨著機器人工作空間的擴充套件,相對誤差也會增加,這主要是由於離子電阻傳感器的非線性行為所致。未來SHY機器人可以嘗試透過最佳化驅動器尺寸和形狀來改進傳感器的靈敏度。











