
作者| 金旺
欄目| 機器人新紀元
2024年3月27日,浙江人形機器人創新中心正式成立,與之一並亮相的,還有領航者1號人形機器人。
浙江人形機器人創新中心坐落於浙江省寧波市,是由寧波市政府與浙江大學智慧系統與控制研究所熊蓉教授團隊聯合組建,為的正是研究人形機器人。
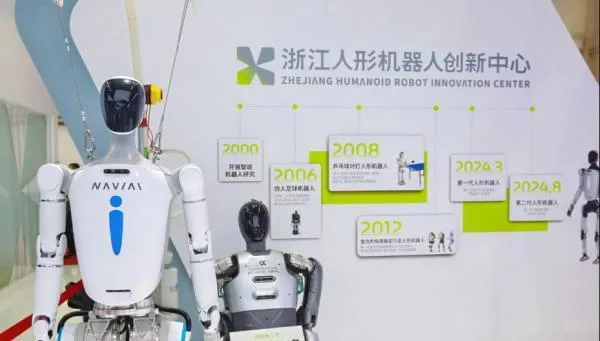
就在前不久, 浙江人形機器人創新中心釋出了第二代人形機器人領航者2號 ,領航者2號也有了一個新的名字,NAVIAI,NAVIAI也是該創新中心第一個具備精確技能作業能力的人形機器人。
相較於一代人形機器人,NAVIAI不僅長大了一號(身高為165cm,體重為60kg),據官方表示,這代人形機器人還具備了以下四個特點:
全身協調穩定行走 ,這代產品突破了非線性模型預測控制和全身運動控制,可以實作更協調穩定的行走,雙臂自然擺動輔助平衡,並降低了行走著地的聲音;
擬人全身模仿學習 ,采用隱空間最佳化與融合模型預測控制的動作模仿學習,能夠快速學習新動作,實作高自由度作業臂連續動態運動下穩定站立;
類人具身智慧導航 ,采用大模型結合強化學習的決策規劃框架,兼顧使用者指令理解與開放空間感知,賦予人形機器人智慧互動導航能力;
通用高精智慧控制 ,突破了長序列操作任務行為決策與可泛化高精度伺服控制技術,實作了雜亂堆疊場景高效桌面整理與可泛化亞公釐精度軸孔裝配。
在近日開幕的2024世界機器人大會(WRC 2024)上,浙江人形機器人創新中心展出了他們新釋出的人形機器人NAVIAI,他們甚至在展台模擬零售場景搭建了一個「雜貨鋪」,站在「櫃台」內的NAVIAI可以隨時從貨架上取下飲料,遞到「結賬台」上。

這樣有靈性的人形機器人,也引來了不少圍觀。
而關於這款人形機器人、浙江人形機器人創新中心,以及人形機器人熱鬧的2024年,我們和浙江人形機器人創新中心首席科學家、浙江大學求是特聘教授熊蓉教授進行了一場對話,熊蓉教授告訴了我們她對這些問題的理解。
01 人形機器人的標準化,依然處於初級階段
問:浙江人形機器人創新中心對於人形機器人產業的價值和意義是什麽?
熊蓉: 浙江人形機器人創新中心是以人形機器人產品打造為牽引,推動人形機器人技術發展,同時帶動上遊核心零部件供應鏈,並推動人形機器人在下遊真實場景落地套用,借由這一方式推動人形機器人產品、技術和產業生態發展。
問:現在人形機器人硬體本體標準化發展到了怎樣的一個程度?
熊蓉: 人形機器人的標準化目前還處於大家剛開始探討的階段,雖然人形機器人已經發展了50年,但在過去50年裏,人形機器人一直是研究領域的問題,直到去年才真正進入到了產品化、產業化初級階段。
現在相關的標委會也都在設立人形機器人的技術標準,推動人形機器人相關標準的建立。
但我覺得這個標準更多包括規範、套用的輸出,由此帶動技術的發展,至於說我們是不是要去統一人形機器人的關節,乃至硬體本體,目前還處於一個百花齊放的狀態。
就像電腦最初都是各家有各家的標準,直到發展到一定階段,大家才開始做相容、標準化。
02 大模型用於運動控制,穩定性是關鍵
問:浙江人形機器人創新中心剛剛釋出的NAVIAI,在運動控制這一塊用到的是怎樣的控制演算法?
熊蓉: 我們這次展出的兩台演示行走的人形機器人,一台用的是 非線性模型預測控制+全身控制 ,而且我們是基於開源方案做了最佳化和改進,所以可以看到它在走路的時候, 它的雙 臂和腰會根據它的步幅和步速自動進行自然的調整,從而有了這樣一個擬人化行走的形態 。
另外一台人形機器人,我們是用強化學習方式來進行運動控制。
此外,我們在展台上還有一台灰色的人形機器人,它站在螢幕前面,我們在大會期間會讓它做定時的講解功能演示,在講解演示過程中,它整個手臂會連續動態地運動。
因為我們這台人形機器人的手臂具備作業能力,會有負載要求,每條手臂重6.5公斤,這種連續動態運動實際上對人形機器人的穩定控制帶來了很大的挑戰。
我們今年3月釋出一代人形機器人時,一代人形機器人的手臂要比二代輕一些,但依然需要透過兩條腿不停地動態運動來保持身體平衡。這次需要讓機器人始終保持站立狀態,控制空間很小,對控制技術帶來了很大的挑戰。
我們這一代人形機器人能夠實作這樣的能力,是 將機理控制、模仿學習、強化學習進行了打通,形成了現在的融合控制演算法 。
此外, 我們現在的人形機器人已經在展廳講解和工業場景中的裝配、分揀等技能作業方面有一些落地套用 。
問:運動控制方面,NAVIAI是否有用到了大模型?
熊蓉: 我們在互動方面有用到語言大模型,但是視覺的話,我們要保證可靠性、穩定性,我們自己有一套三維重構和檢測辨識演算法。
技能作業方面,我們用的是自己提出的一套方法構建的技能作業模型,它是通用的,可以用到各種視覺、力覺伺服控制系統中。
基於這套架構和演算法,我們的人形機器人在今年3月已經能夠實作精準對接,例如將插頭插到插座中,現在用同樣的技術可以拿工具進行打螺絲作業。

03 人形機器人服務人類,至少還要五年
問:人形機器人要進入家庭場景扮演保姆的角色,難點在哪裏?
熊蓉: 即使是輪式移動機器人,現在大都是在有一定限定的場景中使用,如果到了一個新環境裏,往往還需要人先對場景進行部署, 當人流量較大時,依然會出現執行任務失敗的情況 。
從操作角度來看,我們日常生活中這麽多物體是否都能準確認知,例如我們讓人形機器人端茶倒水, 我們原來認為用大模型是OK的,但真用大模型執行這樣的任務時發現,茶壺、公道杯都辨識不出來 。
所以其實技術都還在一個推進過程中。
問:您覺得人形機器人真正進入我們實際生活中還需要多久?
熊蓉: 如果不是兩條腿的話,可能在五年左右會先在商用環境中從事服務性工作。
問:您認為人形機器人的合理價格區間應該在一個怎樣的價位段?
熊蓉: 如果是家庭場景的話,首先人形機器人要能滿足人類對人形機器人任務性的需求,類似保姆,實際上,保姆行業在未來社會開發中會變得越來越貴,我覺得 人形機器人的價格可以參照一台大眾消費得起的車的價格來定義 。
問:現在機器人熱潮已經在呈現一個收緊的趨勢嗎,從產業大繁榮進入產業淘汰賽?
熊蓉: 一定會有這樣一個過程,人形機器人產業也會是由市場讓有技術並且具有產品理念的團隊沈澱下來,將人形機器人最終做紮實。











