作者 | 芝喆
出品 | 焉知人形機器人
目前自動駕駛行業的發展在一定程度上已經出現了一些疲軟的跡象。一方面,自動駕駛技術的商業化行程相對緩慢,部份原因包括技術難題尚未完全解決、法律法規和政策尚未完善、使用者接受度和信任度還不夠等。另一方面,自動駕駛領域的競爭日趨激烈,各大企業和初創公司都在爭奪有限的市場份額和資源,導致一些公司可能面臨資金緊張和技術挑戰。
在這樣的背景下,轉向智慧機器人研發可能是一個有意義的選擇。智慧機器人領域具有廣闊的套用前景,包括個人服務機器人、醫療護理機器人、教育培訓機器人、工業生產機器人等。相比之下,智慧機器人的套用場景更為多樣化,商業化路徑更為清晰,有望更快地實作商業化落地。
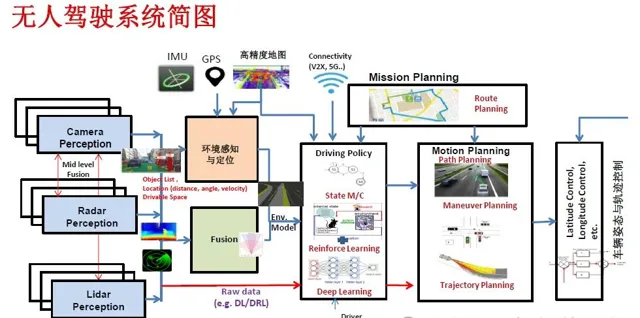
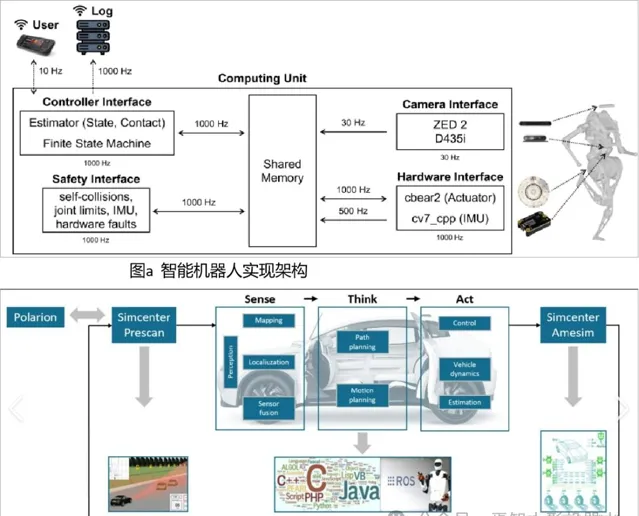
圖1(a)自動駕駛系統工作原理圖
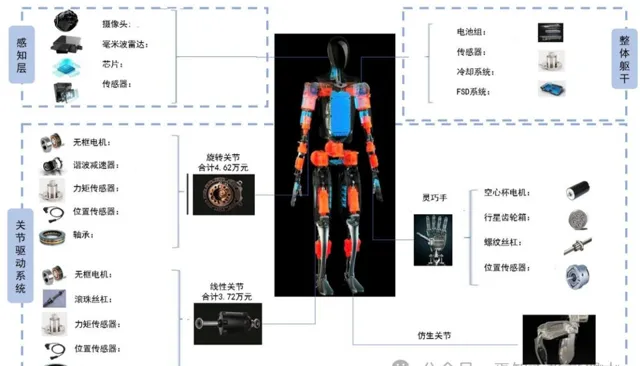
圖1(b)智慧機器人工作模組實作原理
本文將詳細介紹如何從智慧駕駛研發崗位轉到智慧機器人需要具備哪些技能要素,以及如何才能從入門轉型為一名合格的智慧機器人研發工程師。
相較於自動駕駛行業,智慧機器人研發同樣面臨一系列挑戰, 包括人機互動技術、感知與決策能力、運動控制與規劃等方面的技術難題,以及市場競爭和商業模式創新等方面的挑戰。 因此,在考慮轉向智慧機器人研發時,企業需要充分評估市場需求、技術實力和競爭環境,確保能夠抓住機遇並取得成功。而工程師個人則需要需要具備跨領域的知識和技能,包括機器人學、人機互動、電腦視覺、人工智慧等方面的知識。同時也需要具備持續學習和創新的能力,以適應快速發展的技術和市場變化。
實際上,自動駕駛汽車都可以看成是一種特殊的機器智慧體或智慧機器人。 但是,自動駕駛車輛和智慧人形機器人的套用場景和技術要求有所不同,對智慧人形機器人進行系統架構設計時,但它們都面臨著 一些共同 的挑戰和難題。
智慧人形機器人通常需要執行各種復雜的任務,如陪伴、助力、服務等,需要在不同的環境和場景中適應變化。因此,系統需要具備一定的智慧和學習能力,能夠根據任務需求和環境變化做出適當的調整和改進。
智慧人形機器人的開發同樣面臨著諸多挑戰和難題, 其中一些與自動駕駛車輛類似。 然而,由於兩者的套用場景和技術要求不同,因此在具體的技術解決方案和套用策略上可能會有所差異。
1、適應復雜的任務和環境
在適應復雜的任務和環境方面,自動駕駛車輛和智慧機器人存在一些區別:
在執行任務復雜性方面,自動駕駛車輛的任務相對單一 ,主要是在道路上安全地行駛到目的地。雖然道路交通環境復雜多變,但是自動駕駛系統的主要任務是遵守交通規則、避讓障礙物等,相對來說更加可控。
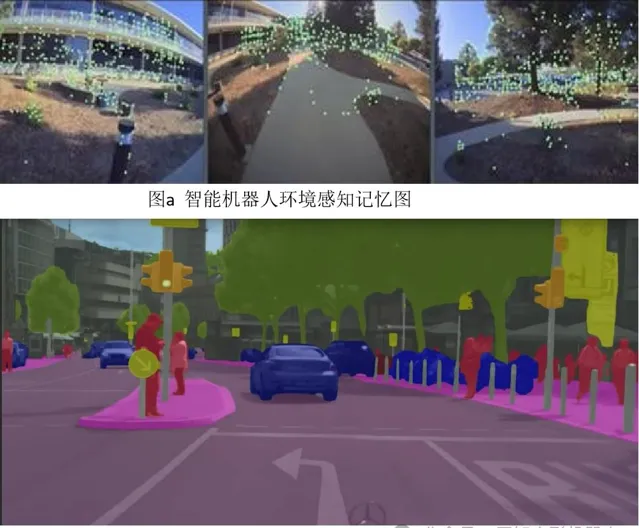
圖2 智慧汽車環境感知和智慧機器人環境感知
而智慧機器人的任務通常更加復雜多樣 ,涉及到環境感知、路徑規劃、物體辨識、人機互動等多個方面。智慧機器人可能需要在各種不的環境中自主行動,並完成不同同的任務。
在面對復雜的環境時,自動駕駛車輛主要在道路交通環境中行駛,雖然道路環境復雜多變,但是相對受控,遵循一定的規則和標準。而智慧機器人可能需要在各種復雜的環境中操作,如室內、戶外、不同地形等。智慧機器人需要具備更強的適應能力,能夠應對各種復雜的環境情況。
自動駕駛和智慧機器人在適應復雜的任務和環境方面存在一些區別,主要體現在任務復雜性、環境復雜性等方面。 智慧機器人通常需要具備更高級別的感知、規劃和控制能力 ,以適應更加復雜多變的任務和環境。
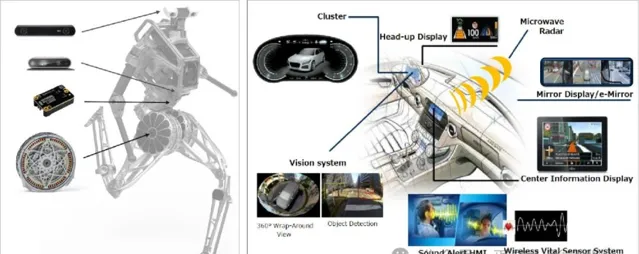
2、場景感知硬體布局:
智慧人形機器人需要能夠感知周圍的環境,包括障礙物、地形、其他人類等資訊,以便做出合適的決策和行動。從傳感角度來看,對周圍環境的更大視野本質上是可能的,因為機器人存在更高的點(即頭部)。 與其他可以自然安裝網路攝影機的機器人平台相比,能夠從高點靈活調整頭部的位置和方向,這意味著更好的視野和對環境的更好理解,從而可能實作更好的規劃演算法和部署。
這要求系統能夠有效地處理傳感器數據,並從中提取有用的資訊。 對於人形機器人而言,套用相對可靠的感知和導航技術是必要的方式。 人形機器人需要準確地感知周圍環境,並能夠進行定位和導航。這涉及到多種感知技術的整合,包括視覺傳感器、雷射雷達、超音波傳感器等,以及定位和地圖構建演算法。
此外,在人形機器人中,較為廣泛使用的傳感器還涉力矩傳感器(主要包括一維和六維)、位置傳感器、觸覺傳感器、慣性傳感器等。比如,目前特斯拉 Optimus 方案采用的梳理分別為 1 個視覺傳感器、28 個一維力/力矩傳感器、六維力傳感器 4 個(手腕和腳踝)、42個編碼器、10 個觸覺傳感器和 2 個慣性傳感器。
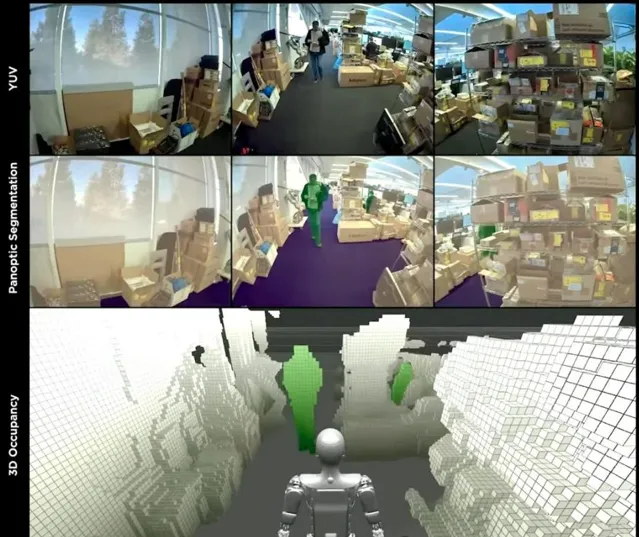
圖3 機器人安裝智駕網路攝影機的感知範圍
此外,對於場景理解而言,智慧人形機器人需要能夠充分理解周圍環境的場景和語境,包括理解不同物體之間的關系、預測物體的行為等。 這需要結合深度學習和自然語言處理技術,以實作更加智慧和自然的互動。 對於場景理解上,自動駕駛則相對簡單很多,甚至很多可以直接歸於基於規則或可解釋的場景理解表示形式對場景進行拆分和處理。
自動駕駛系統中套用的傳感器模型和感知演算法在一定程度上可以套用於智慧機器人 ,但需要根據具體的套用場景和機器人的特性進行適當調整和最佳化。以下是一些需要考慮的因素:
傳感器選擇和布局: 自動駕駛系統通常使用雷射雷達、網路攝影機、雷達、GPS等多種傳感器進行環境感知。 在智慧機器人中,可以根據具體需求選擇合適的傳感器,並考慮傳感器的布局和參數設定,以實作對周圍環境的有效感知,包括障礙物檢測、定位導航、目標辨識等。 不同的傳感器具有不同的感知能力,如網路攝影機適用於影像辨識,雷射雷達適用於距離測量等。
傳感器數據融合: 自動駕駛系統通常透過傳感器數據融合演算法將不同傳感器的數據進行融合,以提高環境感知的準確性和可靠性。在智慧機器人中,也可以 借鑒 這種方法,將多種傳感器的數據進行融合,以獲取更全面的環境資訊。
環境建模和目標檢測: 自動駕駛系統通常需要對周圍環境進行建模,並檢測辨識各種目標物體,如車輛、行人、障礙物等。在智慧機器人中,同樣需要進行環境建模和目標檢測,以實作對周圍環境的理解和感知。這裏需要說明的是, 智慧機器人中的環境建模和目標檢測相對於自動駕駛來說更加復雜和多樣化,需要應對更高級別的挑戰 ,包括環境復雜性、任務多樣性、傳感器數據融合、即時性要求和復雜目標檢測等方面的難點。
3、高效的運動控制和規劃
人形機器人和自動駕駛車輛在運動規劃上有一些顯著的區別, 相比之下,自動駕駛車輛的運動規劃相對更為簡單和直接。 自動駕駛車輛通常在預先規劃好的道路網路上行駛,其運動規劃主要涉及到路徑規劃和速度控制,以確保車輛安全、高效地行駛。自動駕駛車輛的運動規劃更註重於遵守交通規則、避讓障礙物和其他車輛,以及實作路徑的平滑和高效。
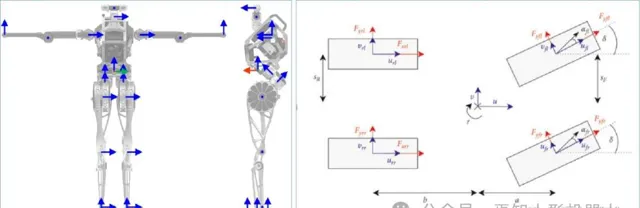
人形機器人和自動駕駛車輛在運動規劃上的區別主要體現在運動方式、姿態規劃、互動性和即時性等方面 ,需要根據具體的套用場景和需求進行相應的規劃和設計:
運動方式和環境適應力: 人形機器人通常在復雜多變的環境中移動,需要具備較強的靈活性和適應力,能夠應對不同地形、障礙物和人群等情況。因此,人形機器人的運動規劃需要考慮到人體的動力學特性和環境的復雜性,以確保機器人能夠安全、自然地移動。
姿態和動作規劃: 人形機器人不僅需要規劃移動的路徑, 還需要規劃相應的姿態和動作,以實作穩定、流暢的移動。 這涉及到對人體動力學和運動學的深入理解,以及對姿態和動作規劃演算法的高效設計。
互動性和社交性: 人形機器人通常需要與人類進行互動和共處,因此其運動規劃 還需要考慮到與人類的社交規範和行為習慣 。這包括避讓行人、與人類保持適當的距離和方向等,以確保互動的自然和友好。
即時性和反應速度: 人形機器人在移動過程中需要即時地感知和響應周圍環境的變化,因此其運動規劃需要具備較高的即時性和反應速度,能夠及時調整行動策略。
4、人機互動和語意理解
智慧人形機器人需要能夠與人類進行有效的互動,包括語音互動、面部表情辨識、姿態辨識等。這要求系統能夠理解人類的語言和行為,從而提供個人化的服務和支持。
首先在人機互動互動方面 ,對自動駕駛車輛控制而言,車輛的人機互動相對簡單,主要體現在車輛與駕駛員之間的資訊傳遞和指令執行。自動駕駛車輛需要能夠向駕駛員傳遞重要資訊,如警告、提示等,同時能夠根據駕駛員的指令進行相應的行動。
而對於智慧機器人而言, 智慧機器人需要與人類進行復雜的互動,包括語音對話、姿態辨識、情感交流等。 智慧機器人的人機互動更加細致和個人化,需要考慮到人類的情感和心理需求,以實作更加自然和愉快的交流體驗。
其次 ,在環境語意辨識方面 ,自動駕駛車輛的環境語意辨識主要集中在道路和交通環境上,包括辨識交通標誌、訊號燈、車輛和行人等。自動駕駛車輛需要能夠準確理解這些環境資訊,以實作安全、高效地行駛。
而智慧機器人需要對周圍環境進行語意理解,包括辨識不同物體、理解場景和情境等。智慧機器人的環境語意辨識需要考慮到物體的種類、內容和功能,以及場景的意義和背景資訊。
5、安全性和可靠性要求高
在對安全性和可靠性要求設計上,一般來說, 自動駕駛車輛的安全性和可靠性要求會更高一些 ,主要是針對潛在危險性、監管標準、套用場景幾個方面。
首先 ,自動駕駛車輛在道路上行駛,其失控可能會導致嚴重的交通事故,對人身安全造成威脅。因此,自動駕駛車輛的安全性要求更高,需要在設計和實作上采取更多的安全措施。
其次 ,自動駕駛車輛受到嚴格的監管標準和法規要求,需要透過一系列的測試和認證來證明其安全性和可靠性。這些標準通常比智慧機器人領域的標準更為嚴格。
最後 ,自動駕駛車輛通常在復雜的交通環境中執行,需要處理各種不確定性和動態變化。相比之下,智慧機器人通常在相對受控的環境中執行,其安全性要求相對較低。因此,由於自動駕駛車輛的特殊套用場景和潛在危險性,其安全性和可靠性要求通常會更高一些,需要在設計和實作上投入更多的精力和資源來保證其安全性和可靠性。
智慧人形機器人在與人類密切接觸和共處過程中,其安全性和可靠性要求卻非常高。因此,智慧機器人系統也需要具備安全的機械設計、安全的運動控制演算法,以及自我保護能力,確保在與人類互動過程中不會造成傷害。
總結
自動駕駛行業和智慧機器人行業的轉型在一定程度上是有必要的,特別是在當前自動駕駛行業發展疲軟的情況下,轉向智慧機器人領域可能是一個有意義的選擇。
智慧機器人中的路徑規劃和運動控制與智慧駕駛相比,更具有環境復雜性、任務多樣性、互動性和精細度等方面的挑戰,需要更加靈活和智慧的演算法和策略來應對各種復雜情況。
智慧機器人通常需要在復雜多變的環境中進行路徑規劃和運動控制,包括室內、室外、不同地形等多種場景。而智慧駕駛主要在道 路交通環境中進行路徑規劃和運動控制,雖然道路交通環境復雜,但相對受控。
智慧機器人的任務多樣化,可能涉及到避障、導航、物體搬運等多種任務,需要靈活的路徑規劃和運動控制策略。而智慧駕駛的任務相對單一,主要是安全地駕駛到目的地,路徑規劃和運動控制相對固定。
智慧機器人通常需要與人類進行互動,如避讓行人、避障等,路徑規劃和運動控制需要考慮到人機互動的因素。智慧駕駛主要與其他車輛和交通設施進行互動,需要遵守交通規則和安全駕駛。
智慧機器人的路徑規劃和運動控制可能需要更高的精細度和靈活性,以應對復雜環境和任務需求。智慧駕駛的路徑規劃和運動控制需要考慮到車輛的速度和安全性,需要更加穩定和可靠。
除了以上提到的一些技術差異帶來的難度外,關鍵還在於深入市場分析、技術創新、產品多樣化、成本控制、市場行銷和人才團隊建設等方面的努力,以應對行業轉型帶來的挑戰,實作長期發展。











