什麽是人形機器人?工業和資訊化部釋出的【人形機器人創新發展指導意見】中,將人形機器人定義為「整合人工智慧、高端制造、新材料等先進技術,有望成為繼電腦、智慧型手機、新能源汽車後的顛覆性產品,將深刻改變人類生產生活方式」。
「天工」是全球第一個純電驅擬人奔跑全尺寸人形機器人,它可以穩定行走、奔跑、翻越障礙……「天工」是如何惟妙惟肖模地仿人體形態的?現代科技又是如何讓機器人具備理解和認知能力的呢?
人形機器人如何模仿人類奔跑姿態?
一起跟隨記者到人形機器人中心,看看研發人員是如何讓人形機器人「巧奪天工」的。
總台央視記者 張春玲:中國自主研發的全球第一個全尺寸純電驅奔跑人形機器人,名字叫「天工」。它的奔跑速度是每小時6公裏,可以在平地奔跑,也可以適應坡度,進行奔跑。
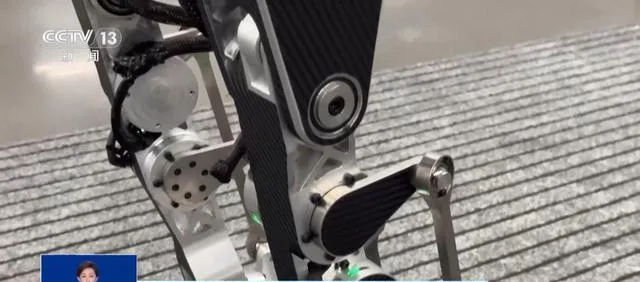
北京人形機器人創新中心本體平台負責人 劉益彰:這一款基礎版本,是專門為運動控制演算法而研發的一個最小系統,擁有完全仿人的腿部設計,腰部也有關節,具有旋轉功能,雙臂也有輕巧設計。
如何訓練機器人惟妙惟肖模仿人體形態?
天工機器人實作了全球首例純電驅全尺寸人形機器人的擬人奔跑。那麽如何訓練它去惟妙惟肖地模仿呢?
天工機器人的訓練場景,和我們想象的真實訓練場景不同,天工的訓練基本都是在虛擬的世界完成的。在這個虛擬世界中,數千個機器人可以同時測試、訓練,完成對自己行為的矯正。

北京人形機器人創新中心運動控制負責人郭宜劼: 我們在這虛擬的物理仿真引擎中,構建了一個非常大的訓練場景。在這個仿真環境中訓練10個小時,可能相當於在物理世界當中,一個機器人24小時晝夜不停地進行100天訓練。

為了讓機器人的奔跑步態更加擬人化,研究團隊透過可穿戴裝置,用動作捕捉的方式進行訓練,讓機器人在動作處理上,更加靈活多變,姿態也更加生動自然。

北京人形機器人創新中心運動控制負責人郭宜劼: 我們把人體的運動數據采集下來,在訓練過程中,這些資訊會經過網路形式和機器人當前的運動數據進行一些對比。這個網路能夠判斷當前機器人運動關系和我們采集的人類數據的關系的相似性,這個相似性的評分也會反饋給機器人策略更新。
如何讓機器人具備理解和認知能力?
在智慧決策和控制方面,天工機器人引入了人工智慧大模型技術,讓它具備了理解和認知的能力。
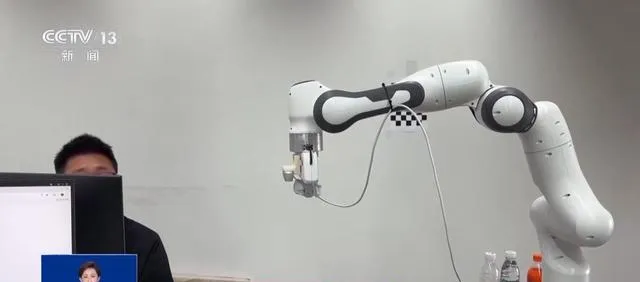
研發人員將辨識系統和大模型演算法整合在了一個機器臂上,讓機器臂具備了感知和判斷執行的能力。可以隨機辨識抓取桌子上的任意物品。
總台央視記者 張春玲: 這個模型在辨識一些沒有見過的物體和一些異形甚至是不規則物體的時候,抓取能力還是非常精準的。
同時,為了滿足特定場景需求,減少大模型對算力的依賴,研發團隊正在建立人形機器人的數據集。透過量化或者壓縮的演算法,讓機器人依賴相對少量的數據集就可以具備較好的理解能力。同時,也可以讓機器人在斷網的情況下進行工作。
北京人形機器人創新中心具身智慧負責人鞠笑竹: 未來會在家庭服務,包括物流、3C制造、家電制造,還有一些巡檢的場景裏,其實都去大量使用整個具身智慧+的人形機器人。
「天工」正在進行持續叠代和開發
我們看到的「天工」,不僅是一個人形機器人,還是人形機器人的母平台。
研發人員介紹,機器人母平台可以作為一個基礎平台,擴充套件出更多的功能。比如更換安裝更為精巧的機器臂、更為智慧的頭部等。在機器人的胸腔內,還留存了足夠的空間,方便它擴充套件電池續航和運算能力。
目前,人形機器人母平台「天工」正在進行持續的叠代和開發,作為一個母平台,未來會開放給機器人整個產業生態,帶動整個產業鏈,降低制造門檻,同時避免重復開發浪費的時間和成本。(來源:央視新聞客戶端)











