無形的"粘液"機器人可以改變形狀來完成復雜的任務--這聽起來像是科學幻想。然而,麻省理工學院的研究人員已經開發出一種機器學習技術,使形狀可變的軟體機器人離現實更近了一步。
1991 年,邪典電影【終結者 2:審判日】(Terminator 2: Judgment Day)中的 T-1000 向世人展示了可變形機器人的概念。從那時起(如果不是在此之前的話),許多科學家都夢想著創造一種能夠改變形狀的機器人,以執行各種任務。
但是,麻省理工學院的一個研究小組正在努力開發能夠做到這一點的機器人。他們開發了一種機器學習技術,可以訓練和控制一種可重新配置的"粘液"機器人,這種機器人可以擠壓、彎曲和拉長自己,從而與周圍環境和外部物體進行互動。遺憾的是,這個機器人不是由液態金屬制成的。
麻省理工學院電腦科學與人工智慧實驗室(CSAIL)的陳博源(Boyuan Chen)是概述研究人員工作的研究報告的共同作者,他介紹說:"我們的機器人就像粘液一樣,可以真正改變自己的形態。我們的方法效果如此之好,非常令人震驚,因為我們面對的是一種非常新的東西"。
研究人員必須設計出一種方法來控制粘液機器人,這種機器人沒有手臂、腿或手指,也沒有任何骨架供其肌肉推拉,更沒有任何固定位置的肌肉致動器。如此無形的形態,如此無盡動態的系統......這些都是噩夢般的場景:你究竟該如何為這樣一個機器人的動作編程呢?
顯然,在這種情況下,任何標準的控制方案都將毫無用處,因此研究小組求助於人工智慧,利用其處理復雜數據的巨大能力。他們開發出了一種控制演算法,可以學習如何移動、拉伸和塑造所述球狀機器人,有時還可以多次學習,以完成特定任務。
粘液機器人沒有固定的"骨架"或執行器位置,因此具有極高的靈活性,但同時也是對控制系統的巨大挑戰 麻省理工學院
強化學習是一種機器學習技術,用於訓練軟體利用試驗和錯誤做出決策。它非常適合訓練具有明確運動部件的機器人,例如帶有"手指"的抓手,可以對使其更接近目標的動作進行獎勵--例如撿起一個雞蛋。那麽,由磁場控制的無形軟體機器人呢?
"這樣的機器人可能有成千上萬塊小肌肉需要控制,"陳說。"因此,用傳統方法學習它非常困難。粘液機器人需要一次移動大塊粘液,才能實作有效的功能性形狀變化;操縱單個顆粒不會產生所需的實質性變化。因此,研究人員采用了一種非傳統的強化學習方法。
在二維行動空間中,相鄰行動點之間的相關性更強,從而使軟機器人的形狀發生變化
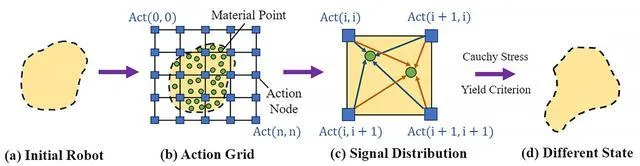
在強化學習中,當一個代理與環境互動時,可供選擇的所有有效行動或選擇的集合被稱為"行動空間"。在這裏,機器人的行動空間被視為由像素組成的影像。他們的模型使用機器人所處環境的影像來生成一個由網格覆蓋的點所構成的二維行動空間。
與影像中鄰近像素的關聯性相同,研究人員的演算法認為鄰近的動作點具有更強的關聯性。因此,當機器人的"手臂"改變形狀時,其周圍的動作點會一起移動;"腿"上的動作點也會一起移動,但與手臂的移動不同。
研究人員還開發了一種"從粗到細的策略學習"演算法。首先,使用低分辨率的粗略策略(即大塊移動)對演算法進行訓練,以探索行動空間並辨識有意義的行動模式。然後,更高分辨率的精細策略深入研究,最佳化機器人的行動,提高其執行復雜任務的能力。
團隊利用人工智慧強化學習技術建立了一個基於任務、以目標為導向的控制系統
"從粗到細意味著,當你采取一個隨機動作時,這個隨機動作很可能會產生不同的結果,"該研究的合著者、同樣來自CSAIL的文森特-西茨曼(Vincent Sitzmann)說。"結果的變化很可能非常顯著,因為你同時粗略地控制了幾塊肌肉"。
接下來是測試他們的方法。他們建立了一個名為"DittoGym"的模擬環境,其中有八項任務可以評估可重構機器人改變形狀的能力。例如,讓機器人匹配一個字母或符號,並讓它生長、挖掘、踢、抓和跑。
"我們在 DittoGym 中的任務選擇既遵循了通用的強化學習基準設計原則,又滿足了可重構機器人的特殊需求。"
"每項任務的設計都代表了我們認為重要的某些特性,例如透過長視野探索進行導航的能力、分析環境的能力以及與外部物體互動的能力,"Huang 繼續說。"我們相信,這些任務加在一起可以讓使用者全面了解可重構機器人的靈活性以及我們的強化學習方案的有效性。"
研究人員發現,就效率而言,他們的"從粗到細"演算法在所有任務中的表現都優於其他演算法(例如,僅使用粗演算法或從零開始使用細演算法)。
要想在實驗室外看到形狀可變的機器人尚需時日,但這項工作是朝著正確方向邁出的一步。研究人員希望,這將激勵其他人開發出自己的可重構軟體機器人,有朝一日,這種機器人可以在人體上行走,或被整合到可穿戴裝置中。
該研究發表在預印本網站arXiv上。











