機器人導航與感知:閔考斯基幾何的引領
隨著科技的飛速發展,機器人技術逐漸成為現代社會中不可或缺的一部份。從工業生產線上的自動化機械臂,到家庭中的智慧掃地機器人,再到深海和宇宙探索中的高級機器人,它們都在為人類的生活和工作帶來了巨大的便利。而在這背後,閔考斯基幾何作為機器人導航與感知的基礎,發揮著不可或缺的作用。
閔考斯基幾何與機器人導航
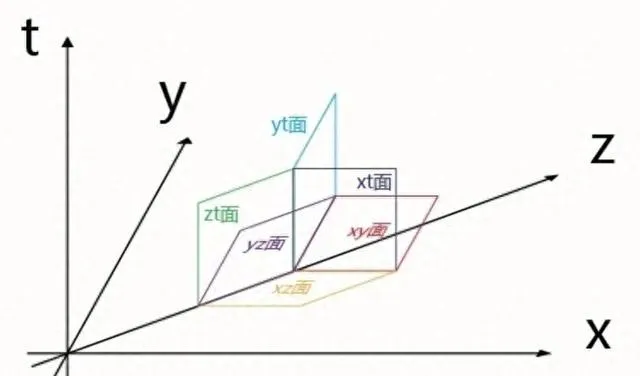
機器人導航是指機器人在未知或已知環境中,根據任務要求自主規劃路徑並移動到達目標點的過程。閔考斯基幾何為機器人導航提供了堅實的數學基礎。在閔考斯基空間中,機器人的位置、速度和加速度都可以表示為向量,這使得機器人的運動軌跡可以更加直觀和精確地描述。
基於閔考斯基幾何,機器人可以構建全域和局部的地圖模型,實作精確的路徑規劃和導航。全域地圖提供了整個環境的概覽,幫助機器人了解環境中的障礙物和目標點的位置;而局部地圖則更加關註機器人周圍的局部區域,為機器人提供即時的導航資訊。
閔考斯基幾何與機器人感知
機器人感知是指機器人透過傳感器獲取環境資訊,並對其進行處理和理解的過程。閔考斯基幾何為機器人感知提供了強大的工具。透過將環境資訊轉換為閔考斯基空間中的幾何物件,機器人可以更加直觀地感知和理解環境。
例如,在視覺感知中,機器人可以透過網路攝影機捕捉影像,並利用電腦視覺技術將影像轉換為閔考斯基空間中的三維模型。這樣,機器人不僅可以感知到物體的位置、形狀和大小,還可以理解物體的空間關系和運動狀態。
閔考斯基幾何的優勢

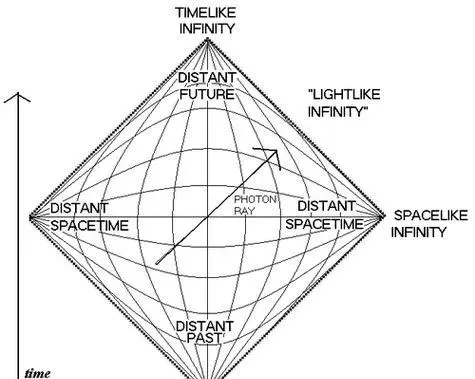
使用閔考斯基幾何進行機器人導航和感知具有顯著的優勢。首先,閔考斯基幾何提供了一種統一的時空描述方式,使得機器人的運動和環境感知可以在同一個框架下進行,簡化了問題的復雜性。其次,閔考斯基幾何具有強大的數學工具支持,使得機器人導航和感知的精度和效率得到了顯著提高。最後,閔考斯基幾何還為機器人的自適應能力和魯棒性提供了基礎,使得機器人可以更好地應對復雜和不確定的環境。
隨著機器人技術的不斷發展和套用領域的不斷拓寬,閔考斯基幾何在機器人導航與感知中的作用將越來越重要。未來,我們期待看到更多基於閔考斯基幾何的創新性套用,為機器人技術的發展註入新的活力。
隨著技術的不斷突破,閔考斯基幾何已經從簡單的導航和感知套用,深入到機器人技術的多個核心領域,為機器人提供了更高級、更智慧的功能。
1. 即時動態規劃
在動態、不確定的環境中,機器人需要即時調整其路徑和動作來應對突發情況。閔考斯基幾何為機器人提供了在時間和空間上連續、統一的描述方式,使得機器人可以在極短的時間內完成復雜的路徑規劃和最佳化,實作即時的動態規劃。
2. 高級感知與認知
除了基本的物體辨識和位置感知,閔考斯基幾何還為機器人提供了高級的感知和認知能力。透過深度學習和模式辨識技術,機器人可以理解和預測環境中的復雜動態,如行人的運動軌跡、車輛的行駛模式等,從而實作更高級的任務執行和決策。
3. 機器人之間的協同與通訊
在多機器人系統中,機器人之間的協同和通訊至關重要。閔考斯基幾何為機器人提供了一個統一的時空框架,使得不同的機器人可以在這個框架下進行資訊共享和協同工作。這不僅提高了機器人系統的整體效率,還使得機器人能夠更好地適應復雜和多變的環境。
4. 情感辨識與表達
隨著人機互動的日益頻繁,機器人需要具備一定的情感辨識與表達能力。閔考斯基幾何為機器人提供了在情感空間中進行描述和表達的基礎。透過分析和模擬人類的情感變化,機器人可以更好地理解人類的需求和意圖,從而提供更加貼心和人性化的服務。
5. 機器人學習與自適應
在未知或不確定的環境中,機器人的學習和自適應能力至關重要。閔考斯基幾何為機器人提供了一種連續、統一的時空描述方式,使得機器人可以在這個框架下進行持續的學習和前進演化。透過不斷地收集和分析環境數據,機器人可以逐漸最佳化其導航、感知和決策策略,從而適應更加復雜和多變的環境。
展望未來
隨著技術的不斷進步和套用領域的不斷拓寬,閔考斯基幾何在機器人技術中的套用前景將更加廣闊。未來,我們期待看到更多基於閔考斯基幾何的創新性套用,為機器人技術的發展註入新的活力。同時,我們也希望機器人能夠在人類的生活中發揮更大的作用,為我們帶來更加便捷、高效和美好的生活體驗。











