近年來,人形機器人的研發領域經歷了前所未有的飛速發展。自ASIMO問世以來,擁有雙臂雙腿、能夠模擬人類行走與移動方式的人形機器人便成為了研究熱點。
尤為引人註目的是, 基於人體各部位肌腱驅動的肌肉骨骼人形機器人的研發活動亦異常活躍。 這類機器人不僅在外形上貼近人體比例,更在關節結構、驅動系統及肌肉排列上深度模仿人體,可深入分析並實作人體的各種技巧性運動。眾多研究聚焦於復制人體關節結構,如Asano等人對人體螺旋回家機構的復制及其運動實作的探討,以及Sodeyama等人關於利用鎖骨和肩胛骨設計上肢的研究,均體現了這一趨勢。

然而,盡管研究眾多, 但針對人類特有的橈尺關節結構在人形機器人中的套用探討卻相對匱乏。 人類前臂由橈骨和尺骨兩塊細長骨頭構成,並透過復雜的軸關節實作旋轉,這一獨特結構在機器人設計中的再現面臨諸多挑戰。 現有具備橈尺關節的類人機器人 多采用氣動執行器,雖便於布置但 控制性欠佳,或無法滿足前臂多自由度所需的肌肉配置。 而傳統肌肉模組雖在可維護性、可靠性及電機控制性方面表現出色,但其體積龐大且需額外結構支撐,難以在不破壞人體比例的前提下實作多自由度。
在此背景下, 來自東京大學的研究人員 為了根據人體的實際體型比例、體重比、肌肉排列及關節效能,開發一款能夠充分發揮其優勢的前臂,深入研究了帶有橈尺關節的前臂開發,還積極探索如何巧妙利用這一結構實作復雜動作,並創新性地 開發出一種新型微型骨骼肌肉模組,實作了肌肉與結構的完美融合。
借助這一突破性設計,研究團隊 成功打造了一款保持多自由度、兼具可維護性和可靠性的、模擬人體前臂的機器人,並首次實作了對人類精細動作的精準模仿,充分展現了橈尺結構的獨特優勢,填補了該領域的研究空白。
那麽,該成果具體是如何實作的呢?接下來,和機器人大講堂來一探究竟吧!
▍微型骨肌肉模組的開發
盡管研究團隊此前已成功研發出多款肌腱驅動的肌肉骨骼人形機器人,如Kojiro、肯佐及拳四郎,但它們在實作橈尺關節、橈腕關節及指間關節的完整功能上仍有所欠缺,這主要歸咎於肌肉排列的復雜性。
傳統肌腱驅動的肌肉骨骼人形機器人在模擬人體前臂的精細結構和多自由度方面存在局限,主要源於肌肉排列和模組設計的挑戰。因此,研究團隊需要將肌肉模組小型化。為了完成這項任務,研究團隊創新性地研發了一種新型微型骨骼肌肉模組。
新開發的微型骨肌肉模組的細節
制作策略
該模組透過兩種核心策略實作突破:
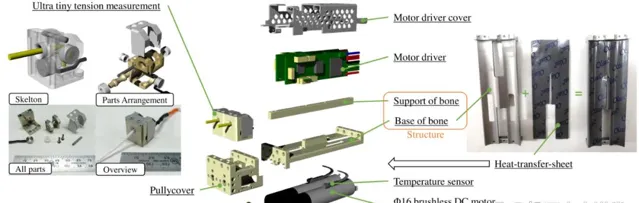
肌肉與骨骼的整合: 該模組巧妙地將兩個執行器融入設計之中,利用兩電機間的空間布局,實作了肌肉執行器與骨骼結構的緊密整合,從而創造了緊湊且高效的構造,避免了傳統設計中結構與肌肉模組的分離所帶來的空間浪費。
微型馬達的套用與散熱創新: 為追求模組的緊湊性,我們選用了小型電機作為動力源。同時,為解決微型電機易發熱的問題,我們設計了一種透過傳熱片將肌肉產生的熱量有效分散至結構中的散熱機制,確保了模組在高扭矩輸出下的持續穩定執行。
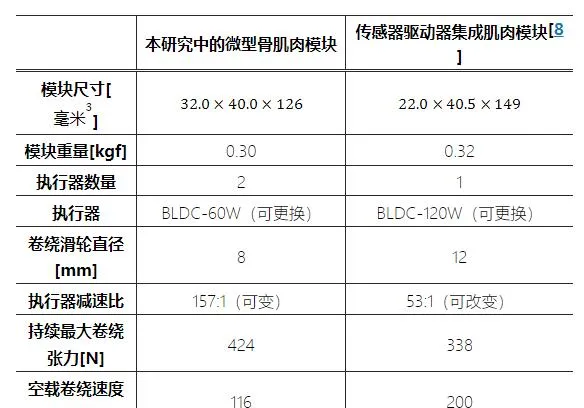
新開發的微型骨骼肌肉模組與傳感器驅動整合肌肉模組的比較
透過上述策略,研究團隊的微型骨骼肌肉模組不僅實作了對人體比例、體重比及肌肉排列的精準模擬,還透過簡單的線性連線即可構建出復雜的橈尺結構,這些結構同時兼具肌肉與骨架的雙重功能。同時保持了可維護性和可靠性。
模組設計
在模組的具體設計上, 研究團隊註重細節最佳化。選用了無刷直流電機,並根據肌肉的實際需求精心調整了齒輪比。導線方面,采用了高強度的Dyneema線,並透過精密滑輪進行引導,以確保傳輸的穩定性和效率。張力測量單元則整合了多種高精度傳感器,並配備了保護蓋,從而顯著提升了操作的穩定性。

新開發的骨骼肌肉模組的通用性。左:超微型張力測量單元的各種布置。右:肌肉模組的各種連線
尤為值得一提的是,研究團隊還 創新性地設計了「骨支撐」和「骨基」結構,使肌肉模組本身成為整體結構的一部份 ,不僅實作了縱向與橫向的靈活連線,還有效減少了材料浪費,提升了結構的整體效能。

有無傳熱片時電機熱量傳遞的比較。用新開發的微型骨骼肌肉模組舉起 20 [kgf] 和 40 [kgf] 的重物
此外,該模組還 具備高效的散熱機制 。透過「骨基」與兩電機間的傳熱片設計,模組能夠將產生的熱量有效分散至整個結構中,確保即使在高齒輪比下也能維持連續的高肌肉張力,並實作反向驅動,大大提升了模組的耐用性和可靠性。
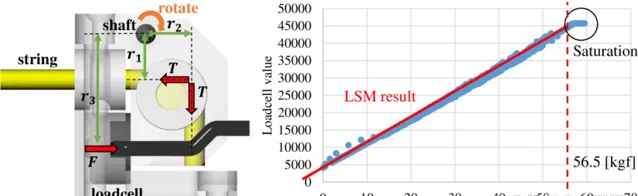
超微型張力測量裝置的原理。左圖為張力測量的原理。右圖為校準結果
在張力測量技術方面,研究團隊也取得了重大突破。他們 研發出了一種超微型的張力測量裝置,透過垂直排列稱重傳感器的方式,實作了空間的高效利用 。相較於舊款裝置,其體積減小了61%,尺寸僅為16×16×19[公釐^3],卻能夠測量高達56.5[kgf]的張力,展現了卓越的測量效能和緊湊的設計優勢。
效能評估
在效能評估方面,研究團隊對新開發的微型骨骼肌肉模組進行了全面的效能評估。
與傳統模組相比,盡管本研究模組內含兩個執行器且電機尺寸與效能有所差異,但其僅導致21%的體積增加,同時增加了肌肉數量。 該模組設計賦予機器人高設計自由度,超微型張力測量單元可靈活布置,模組間連線方式多樣,充分利用了肌肉模組作為結構元素的優勢。
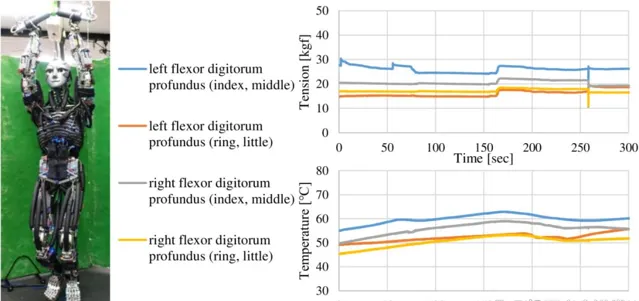
懸垂的結果。左圖:懸垂運動概覽。右圖:實驗期間的肌肉張力和溫度
實驗證明,該裝置能準確測量高達56.5[kgf]的肌肉張力,且透過有效散熱設計顯著抑制了溫度上升,確保了持續的高肌肉張力輸出。實際套用測試中,新開發的前臂成功套用於Kengoro機器人,實作了懸垂姿勢的穩定懸掛,進一步驗證了模組的強度與散熱效能。
▍帶橈尺關節的人體模擬前臂的開發
人類前臂由橈骨和尺骨構成,這兩塊骨頭與位於近端和遠端的兩個軸關節共同組成了橈尺關節。該關節具有多個顯著特征,包括尺骨固定時的活動能力、作為斜軸關節的特性,以及透過兩塊長骨分散扭轉的能力。這些特征在人類執行精細動作時發揮著關鍵作用。
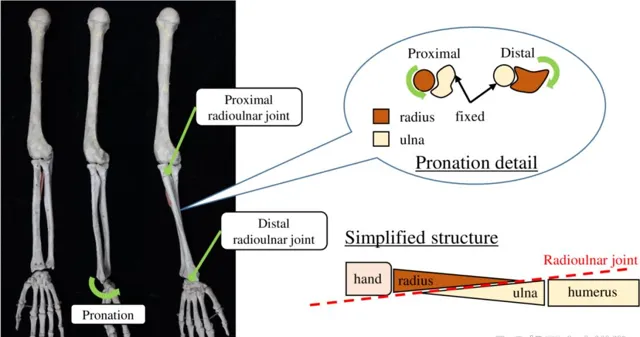
人類橈尺關節的結構
為了充分利用這些結構優勢,研究團隊采用了新開發的微型骨肌肉模組,成功研發了帶有橈尺關節的人體模擬前臂。該前臂設計緊湊,充分利用了微型骨骼肌肉模組能夠縱向和橫向連線形成結構的優勢。
 新開發的Kengoro前臂的概述
新開發的Kengoro前臂的概述
橈骨和尺骨各配備兩個模組,前臂共有4個模組,因此有8塊肌肉,模擬了人類前臂的肌肉排列和自由度。在肌肉排列方面,研究團隊精心模擬了人類前臂的8塊肌肉,實作了包括橈尺關節、橈腕關節和手指在內的多個自由度。 與其他機器人相比,這款前臂在緊湊性、肌肉數量和自由度表達方面均表現出顯著優勢。
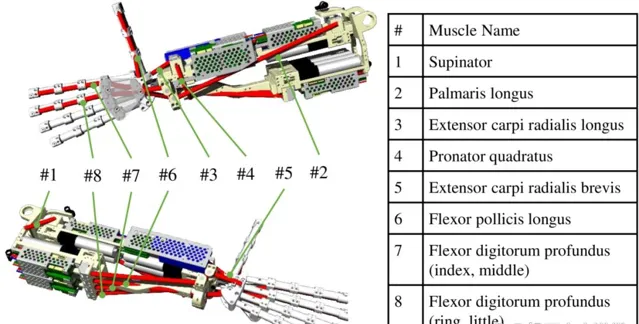
新發育的前臂的肌肉排列
此外,研究團隊成功模仿了人體的比例和體重比,使前臂更加符合人體工學。透過下表的數據展示,研究團隊進一步驗證了前臂在工作空間和最大扭矩方面的效能,證明了其基於人體的準確性和實用性。
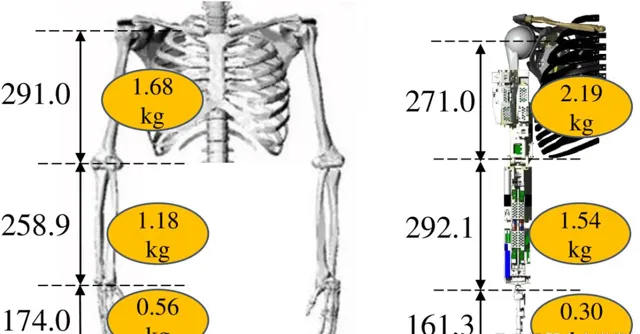
人類與新開發前臂的 Kengoro 上肢連桿長度和重量的比較
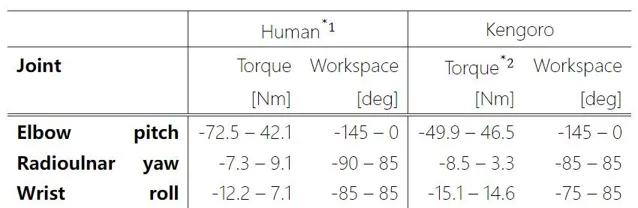
人類與 Kengoro 的關節表現比較
▍利用橈尺結構實作人體熟練動作
基於成功開發的與人體比例相符的橈尺結構,研究團隊進一步探索了Kengoro如何利用這一獨特結構執行各種人類特有的動作。 透過一系列運動實驗,團隊評估了前臂的模仿程度,並驗證了橈尺結構在多種任務中的優勢。

Kengoro 的前臂,由新開發的微型骨骼肌肉模組組成
焊接
在焊接任務中,Kengoro展示了即使在尺骨固定的情況下,橈尺關節仍能保持穩定的移動性,這一特性對於需要手部穩定運動的精細作業至關重要。它彌補了傳統肌腱驅動型肌肉骨骼人形機器人在剛性較低時無法進行精細運動的不足。

Kengoro 焊接。使用烙鐵的 Kengoro 可以將尺骨固定在桌子上,從而移動橈尺關節
開啟書本
在開啟書本的動作中,Kengoro透過旋轉橈尺關節實作了類似轉動手掌的動作,這得益於橈尺關節軸的傾斜設計。這種設計不僅擴大了手部的活動範圍,還結合了橈尺關節在尺骨附著狀態下也能活動的優點,使得手部能夠大範圍且穩定地活動。
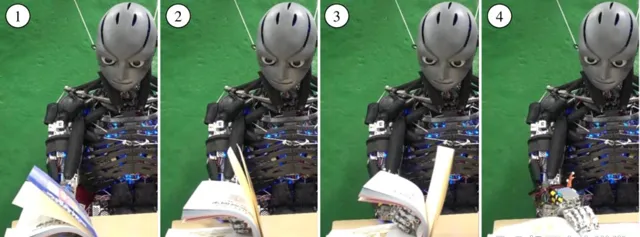
Kengoro 開啟一本書
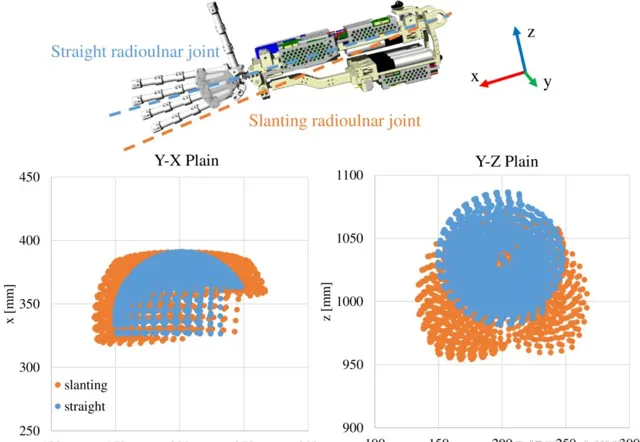
斜橈尺關節與普通直橈尺關節手掌中心可達點對比。左:xy平面。右:yz平面
擰螺絲
在擰螺絲的任務中,Kengoro透過使橈尺關節軸與螺絲刀軸一致,高效地傳遞了扭矩,展示了橈尺結構在需要扭矩傳遞的任務中的有效性。
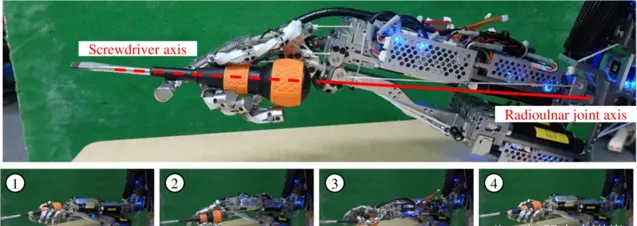
Kengoro 用螺絲刀擰螺絲。上圖顯示橈尺關節軸與螺絲刀軸相吻合
揮羽球拍
在羽球揮拍動作中,Kengoro利用傾斜的橈尺關節增加了球拍頭的旋轉半徑和速度。與普通的直橈尺關節相比,傾斜設計顯著提高了揮拍速度,盡管提升振幅不大,但在競技體育中,正確熟練地使用橈尺關節對於提高揮拍速度具有重要意義。

羽球揮拍動作。上圖為球拍旋轉半徑較大的斜橈尺結構與球拍旋轉半徑較小的普通直橈尺結構的比較
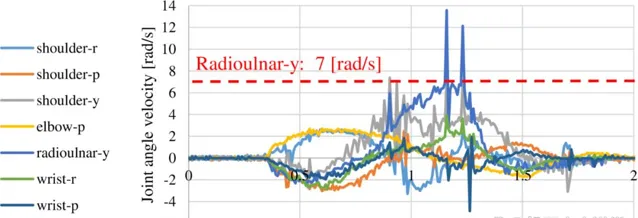
羽球揮拍運動的關節角速度
透過一系列實驗,研究團隊驗證了橈尺結構在多種人體熟練動作中的重要作用,展示了其在提高手部穩定性、活動範圍、扭矩傳遞以及揮拍速度等方面的優勢。
參考文章:https://arxiv.org/html/2408.09934v1











