1. 摘要
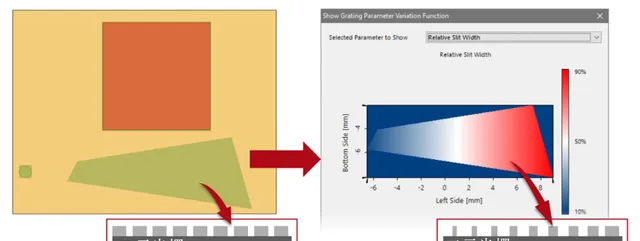
為了控制用於 AR/MR 套用的光導裝置的均勻性和效率,有必要在某些區域,例如 在擴充套件和輸出耦合光柵區域,引入變化的光柵參數,例如填充因子或光柵高度值。
為此,VirtualLab Fusion 能夠在一個區域內引入平滑變化的光柵參數,其中可以以非常不同的方式配置所需的變化。 這還包括一個工具,用於研究針對特定入射條件和光柵參數提供的繞射效率。 這個例子解釋了如何套用這些工具。
2. 建模任務的說明
在光導上引入連續調變的光柵參數(例如,填充因子)。
3. 帶有附加引導的常規工作流程
起點是一個現有的、可執行的光導系統,它具有基本的幾何配置(所需的距離和定位的光柵區域)和光柵規格(方向、周期、階數)。
• Construction of a Light Guide [Use Case]
• Light Guide Layout Design Tool [Use Case]
需要參數調變的區域必須使用真實的光柵結構進行配置。
• How to Set Up a Lightguide with Real Grating Structures [Use Case]
• Simulation of 1D-1D Pupil Expander with Real Gratings [Use Case]
足跡和光柵分析工具用於指定光柵參數變化的所需範圍,在光柵交互作用的指定條件下嚴格計算相應的瑞立系數,並生成可以定義實際參數變化的光學設定 .
• Footprint Analysis of Lightguides for AR/MR Applications [Use Case]
註意:光柵調變是為單個光柵區域定義的。
4. 開啟足跡和光柵分析工具並設定光學裝置
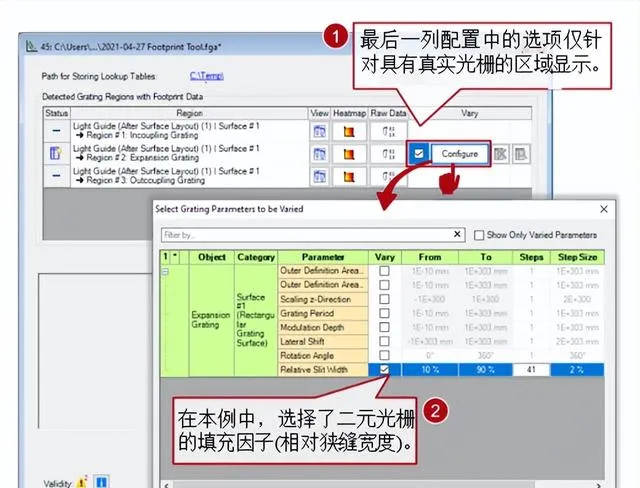
5. 足跡和光柵分析工具
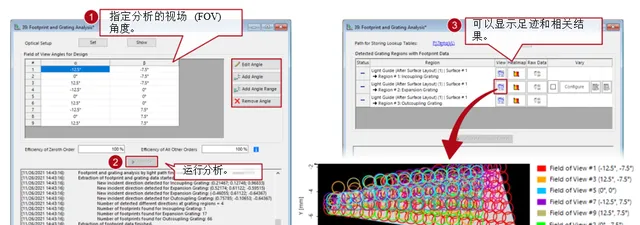
6. 光柵參數和相關範圍的選擇
• 可以同時改變一個或兩個光柵參數。
• 參數空間的采樣可以相對粗略,因為隨後將在計算點之間套用插值技術。
• 該表列出了光柵的所有可用參數。 對於在一個區域內引入調變光柵參數,不允許使用改變光路的參數(如周期等)。
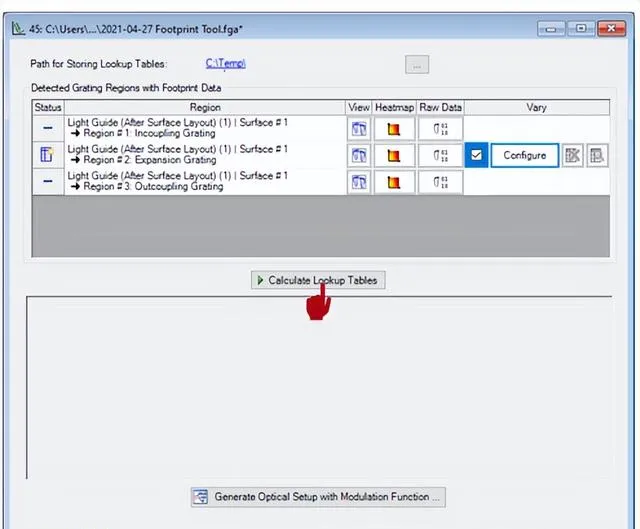
7. 尋找表的計算
在配置所需的光柵參數變化後,可以透過單擊計算尋找表來計算生成的光柵特性並將其儲存在尋找表中。
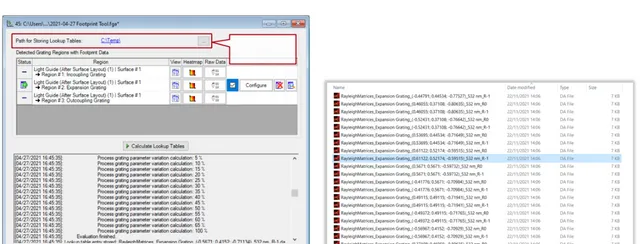
尋找表是針對在足跡和光柵分析工具的第一步中確定的光柵參數和 FOV 模式的定義變化計算的。 尋找表會自動保存到指定資料夾:
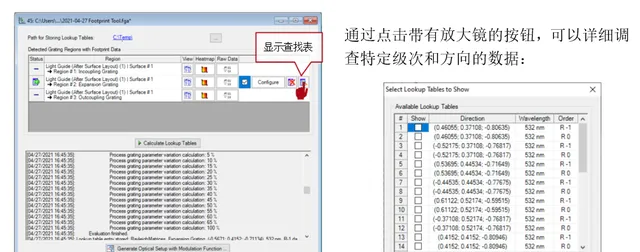
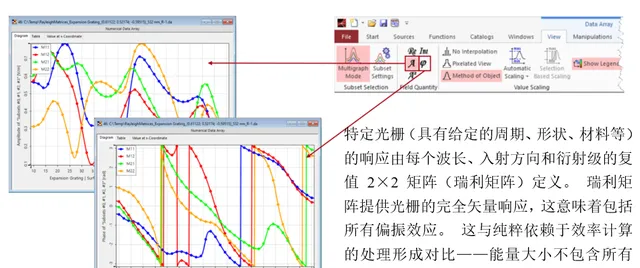
8. 光柵效能的研究
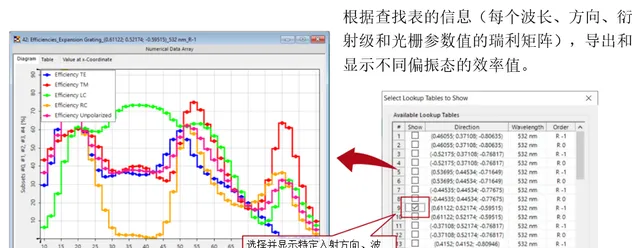

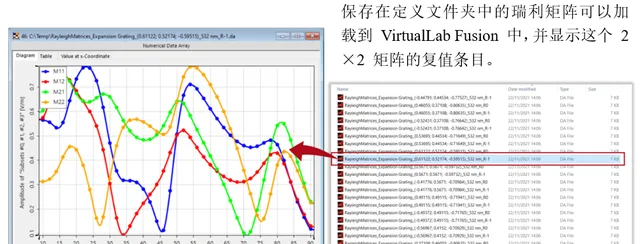
9. 從尋找表載入瑞立矩陣
10. 更新光學系統的產生
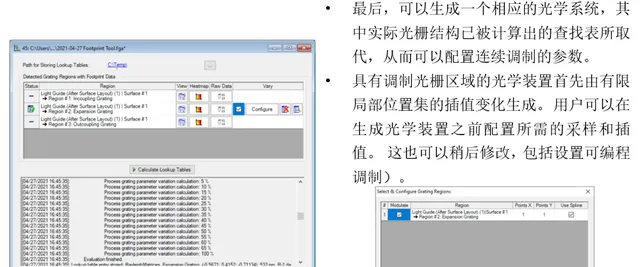
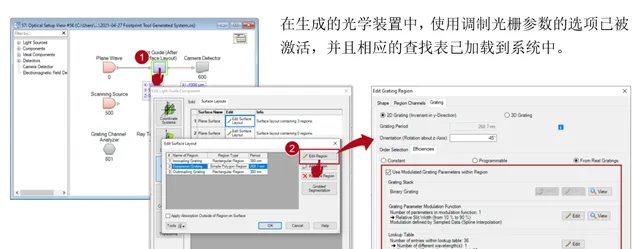
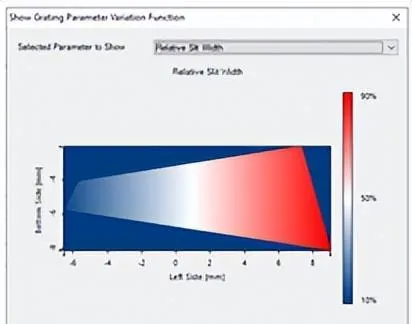
11. 光柵調變配置
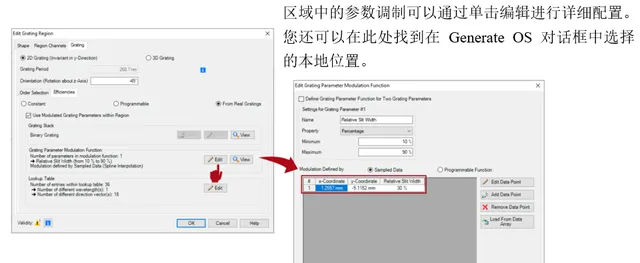
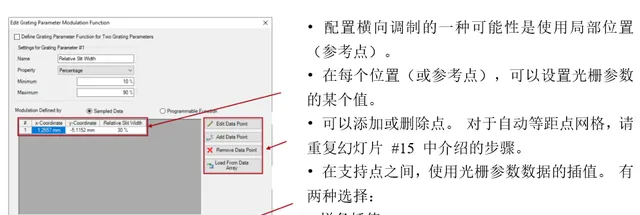
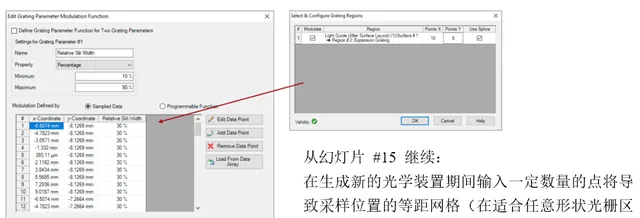
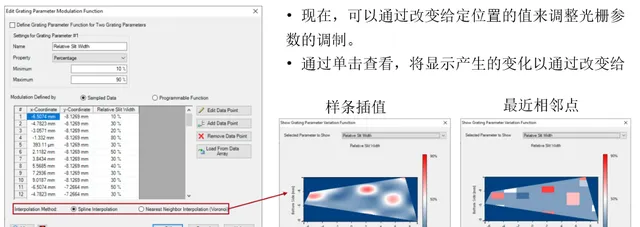
12. 基於采樣位置或網格的調變
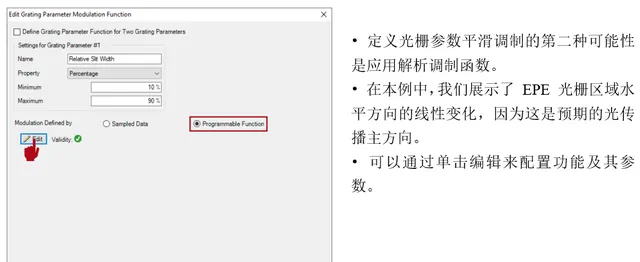
13. 基於解析描述的調變
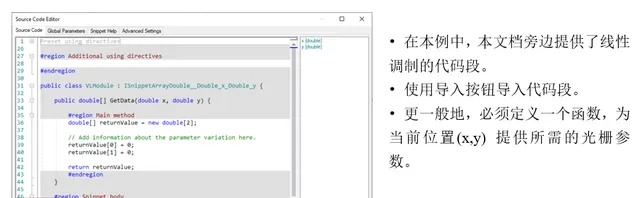
14. 基於數學描述的調變
檔資訊