文|正經的燒杯
編輯|正經的燒杯
«——【·前言·】——»
隨著工農業的不斷發展,農業化肥的使用和工業廢水的非法排放,使得地下水環境中存在的六價鉻、
汞、鉛、鎘等重金屬離子不斷累積,對環境和人類健康產生嚴重危害,因此透過高效的技術原位,測定地下水中的痕量重金屬離子是環境安全和健康診斷的迫切需求。

其中雷射誘導熒光光譜法具有裝置造價低、檢測靈敏度高、分析速度快、可實作原位檢測的優點,被廣泛報道用於水介質中的化學成分和重金屬元素分析,由於受裝置儀器電路,及復雜地下水環境等因素的影響,在使用計畫自研的LIFs。
河南一企業,在某地地下水重金屬檢測裝備現場中,透過原位檢測地下水中重金屬時,采集的LIFs光譜訊號中發現,含有大量雜訊資訊,影響有用資訊的準確提取,模糊光譜強度與重金屬離子濃度之間的關系。
因此公司就依據此,開發一種對原位采集的LIFs光譜訊號,進行有效降噪以便後續分析的方法至關重要,但是目前,常用的光譜訊號降噪方法包括視窗移動多項式擬合法(Savitzky-Golay,S-G)、小波閾值降噪法(WTD)、經驗模態分解(EMD)等。
其中由EMD進一步發展而來的自適應訊號處理方法變分模態分解(VMD),可以將含雜訊訊號分解為具有不同頻率和振幅的訊號分量,從而方便分離雜訊資訊,實作訊號降噪。
VMD目前被廣泛套用於軸承故障診斷、生物科學、地震監測等訊號處理中。但,VMD對LIFs光譜訊號的降噪套用鮮有報道。
基於SAO-VMD-FFT的雷射,誘導熒光光譜訊號訊雜比提升方法,采用雪消融最佳化器(SAO),尋優演算法對分解模式的數量,和懲罰因子進行最佳化,然後輸入最優參數將訊號分解為多個IMF分量。
最後利用快速傅立葉變換(FFT)選擇相關分量,對訊號進行重構,得到降噪訊號,透過對模擬具有4種,不同訊雜比的訊號和采集的原始,地下水中重金屬的真實LIFs光傳感訊號來驗證所提出的方法。
結果表明與其他3種常用降噪方法相比,所提出SAO-VMD-FFT方法具有更好的效能,在保留有效訊號的同時,去除雜訊資訊提高了訊號的訊雜比,有助於提高後續基於LIFs的水質重金屬原位快速檢測準確度。

«——【·研究方法·】——»
VMD,是一種完全非遞迴的自適應訊號分解方法,該方法透過叠代搜尋變分模型的最優解來確定每個分量的中心頻率和頻寬,從而自適應地實作頻域內的有效訊號分離。
傳統的VMD降噪方法主要步驟如下:使用最佳參數下的VMD方法分解含雜訊訊號,獲得多個模態分量(IMF),透過相關模態確定方法,選擇不含雜訊的IMF分量進行重構,獲得訊雜比提升後的訊號。
其中分解模態個數K和懲罰因子,「需要技術人員按照經驗預先給定,「越小,每個IMF分量的頻寬就越大。相反每個IMF分量的頻寬較小,分解模態個數K選擇不當會直接導致訊號分量失真和降噪效果不真實。
由於實際待分析的訊號復雜多變,這兩個影響參數通常很難確定,除此之外,最終IMF分量的選擇準確性。將極大的影響最終降噪效果,當IMF分量選擇過多,將導致訊號降噪不完全,當IMF分量選擇過小,將導致訊號的大量有用資訊被同時去除。
如何選擇合適的參數,和最終模態分量是基於VMD方法,提升訊號訊雜比的關鍵問題。雪消融最佳化器(Snowablationoptimizer,SAO),是DENG等[14]根據雪的昇華和消融行為,提出的新一代全域最佳化演算法,可用於VMD分解最佳參數的確定。
該演算法主要包含4個部份:初始化階段、探索階段、利用階段以及對偶族群機制。初始階段,透過預先確定參數上限、下限,再利用公式(1)隨機生成一批初始粒子。

式中:Z為初始粒子位置,L為各待最佳化參數的下限,U為各待最佳化參數的上限,θ為[0,1]的隨機數。勘探階段,該階段利用高斯布朗運動,來模擬當雪或由雪消融的水轉變為蒸汽時出現的高度分散特征。基於這一過程更新探索位置,從而擴大搜尋範圍,位置更新公式如下:

式中:zi(t)為第t次叠代中第i個粒子的位置;BMi(t)為由表示布朗運動的高斯分布生成的一個隨機數向量。
×表示按行相乘,θ1為[0,1]的隨機數,G(t)表示當前的最優粒子,Elite(t)為一個精英合集中的隨機個體,為整個粒子位置的質心,相應的數學運算式如下:


式中,zsecond(t),zthird(t),為第二優和第三優的粒子位置,zc(t)為適應度值排名前50%的粒子質心位置。
開采階段,主要利用融雪模型(度日法),來圍繞當前的最優解進行開發,從而獲得更優的解,而不是進一步擴充套件其高度分散的功能,此階段的位置更新公式如下:

式中,θ2為[-1,1]的隨機數,M為度日法融雪模型,其運算式如下:

式中:t為當前叠代次數;tmax為最大叠代次數,雙族群機制,在SAO演算法中,為了維持探索和開采兩個階段的平衡,設計了雙族群機制。
該機制為在尋優早期階段,將整個粒子族群隨機分為兩個大小相等的子族群,分別負責探索和開采。隨著叠代的進行,探索的子族群尺寸逐漸減小,而開采的族群尺寸相應增大。
全域最佳化演算法,需要依靠適應度函式,這一標準來進行參數的最佳化,並以此來評價該參陣列合(粒子解)是否為最優結果,因此適應度函式的選擇至關重要,當前,絕大多數文獻通常采用最小包絡熵作為最佳化演算法的適應度函式,以此確定VMD分解最優參陣列合。
包絡熵代表原始訊號的稀疏特性,當IMF中雜訊較多,特征資訊較少時,則包絡熵值較大,反之,則包絡熵值較小。包絡熵計算運算式如下:

式中:pj是a(j)的歸一化形式;a(j)是訊號x(j)經Hilbert調解後得到的包絡訊號。VMD演算法能將含雜訊訊號從低頻到高分頻解,並按照從高頻到低頻的順序對IMF分量進行排序。
一般認為高頻區域為雜訊分量(不相關模式),而低頻區域則為純訊號分量(相關模式)。因此必須確定選擇IMF分量的方法,並以此選擇最終IMF分量,這是訊號進行重建的前提。

對於IMF分量,當隨著IMF分量的增大,IMF分量的頻率會有一個突變,即先平穩變化,後在突變點迅速變小,這時認為第一個較大的頻率,突變點後的IMF分量即為我們選取的純訊號分量(相關模式)。
使用IMF分量的頻率突變點,來區分相關和不相關模式,具體方法為:首先將VMD分解獲得的IMF分量。分別作快速傅立葉變換(FFT),從變換結果中獲取振幅最大對應的頻率值,作為IMF分量的頻率,將IMF分量頻率倒置排序,進行一階滯後差分得到主頻一階差分譜。
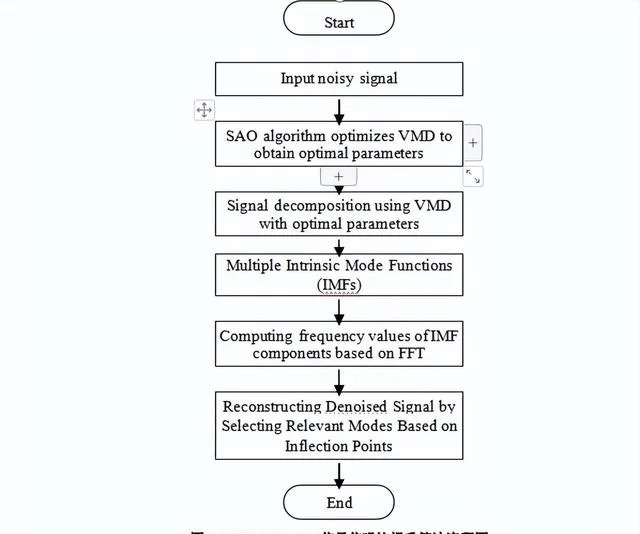
記錄主頻一階差分譜中,第一個大於等於預設差分閾值的主頻差分值的位置t1,保留最後t1個IMF分量作為相關模式。演算法的流程圖如圖1所示,利用雪消融最佳化器,以最小包絡熵作為最佳適應度函式,得到最優參數K和「。
其次,將最優參數作為VMD的輸入,對訊號進行分解,利用FFT獲取IMF分量的頻率,以突變點選擇相關的IMF分量模態,將相關模態累加即得到最終的降噪訊號。
«——【·結果與討論·】——»
仿真光譜訊號由純訊號、基線和雜訊組成,對於純訊號典型的實際LIFs光譜訊號的譜線展寬機制通常為綜合展寬。
即包含了高斯線型函式,和勞侖茲線型的摺積形式,稱之為Voigt線型函式。在實際套用過程中,Voigt線型函式的精確計算較為復雜,實際運用時多采用其近似形式,WERTHEIM等提出的近似形式,作為LIFs光譜訊號仿真的訊號函式,該近似形式如式(8)所示:

式中:a是譜峰高度,a.u.;λ0是譜峰峰值位置,nm;Δλv為半峰寬,nm;η是高斯函式-勞侖茲函式的比例系數,屬於。
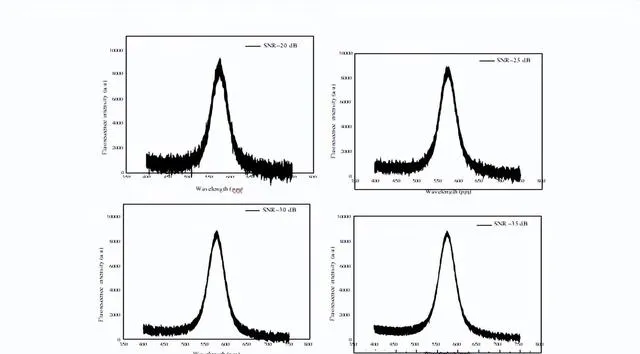
確定上述參數後,即可確定Voigt線型的近似函式,本文設定a為8350a.u.,λ0設定為575nm,Δλv設定為60nm,η設定為0.5。基線采用指數基線,形式如式(9):

式中,x為波長,nm,將由近似Voigt函式生成的峰值訊號與基線疊加獲得無雜訊的光譜訊號,然後添加不同訊雜比的高斯白雜訊,得到模擬光譜訊號,模擬光譜訊號的訊雜比分別為20、25、30和35dB,如圖2所示。
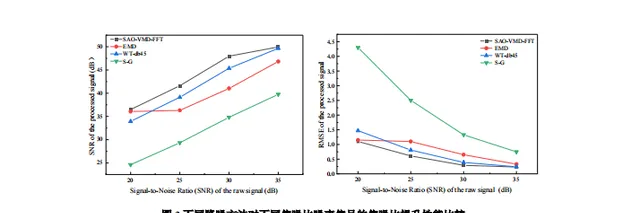
仿真訊號的演算法信,噪比提升處理與結果討論,為了驗證每種演算法在不同雜訊強度下的訊雜比提升效能,將方法(SAO-VND-FFT)與WT-db45(小波基函式為db4,分解層數為5層)、EMD和S-G平滑(七點三次視窗平滑)3種方法進行了比較,使用4種。
降噪演算法,分別對訊雜比為20、25、30和35dB的仿真訊號,進行降噪處理,得到降噪後的訊號,並計算訊雜比(SNR)和均方根誤差(RMSE),計算方式如下:

式中,Y(n)為訊雜比提升後的訊號,s(n)為理性不含雜訊的訊號,降噪後訊號的SNR和RMSE的對比,結果如圖3所示,可以看出,隨著原始訊號的訊雜比增大,四種演算法降噪後訊號的訊雜比均增大。
SAO-VMD-FFT演算法,對於仿真訊號具有最佳的降噪效果,優於其他三種方法,當原始訊號訊雜比為35dB時,方法處理後的訊號訊雜比最高49.96dB,
RMSE最低,為0.23,即使在低訊雜比(SNR=20dB)場景下,經本法處理後的訊號訊雜比仍達到了36.48dB,訊雜比提高了約45.92%,RMSE低至1.10。
為了進一步了解本文演算法對含噪訊號訊雜比提升的細節,采用4種演算法對SNR=30dB的含噪訊號進行處理,結果如圖4所示。
圖中黑色曲線為理想訊號,紅色曲線為各方法訊雜比提升後的訊號,在峰值區域,理想訊號的峰值為(574.92,8477.34),演算法處理後訊號峰值為(574.92,8456.78),EMD法處理後峰值為(575.92,8499.73)。
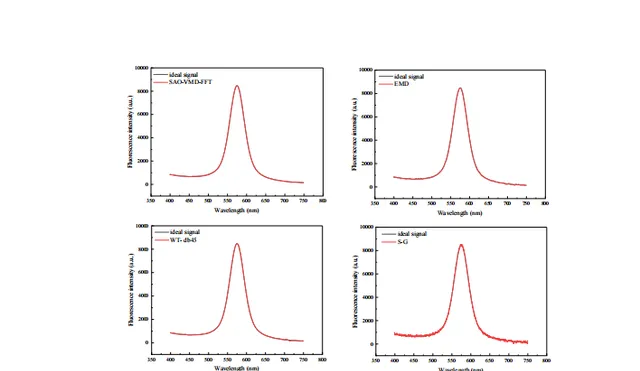
WT-db45處理後峰值為(575.92,8476.71),S-G法處理後峰值為(574.69,8485.182)。可以看出,演算法處理後的訊號強度,基本與理想訊號一致,水平座標未發生位移,而對比的3種演算法水平座標均發生了偏移。
從表1的指標結果來看,方法處理後的訊雜比最高為47.97dB,相比於EMD法、WT-db45法和S-G法。
訊雜比增大分別約15.28%、5.73%和37.77%。具體體現為在基線區域,本文方法處理後的訊號更加平滑,幾乎無毛刺存在,而對比演算法在基線區域仍存在一定的毛刺,平滑度有待進一步提高,對比常用的3種方法,本文方法具有更佳的訊雜比提升效果。
研究結果表明,本文提出的SAO-VMD-FFT演算法具有優異的提升訊號訊雜比的能力。為了進一步驗證該演算法對於LIFs原位檢測地下水中,典型重金屬獲取的光傳感,訊號訊雜比的提升效果,采用該演算法對獲取的10μg/L六價鉻樣品LIFs實際分析訊號進行處理。
原始訊號和處理結果如圖5所示。從圖5中可以看出,原始訊號訊雜比降低,呈現不平滑毛刺,含有大量的雜訊資訊,進行訊雜比提升處理後,
LIFs光傳感訊號的毛刺得到去除,曲線平滑且保留了原來的訊號形狀,訊號的訊雜比得到了大大提高,有利於後續的定性與定量分析。
«——【·結語·】——»
本文針對雷射誘導熒光光譜法原位檢測地下水中典型重金屬時,訊號含有大量雜訊,影響後續定性與定量分析準確度的問題,提出了一種新的訊號訊雜比提升演算法(SAO-VMD-FFT),該方法利用雪消融最佳化演算法(SAO)對VMD參數進行最佳化,包括分解模態個數K和懲罰因子α。
然後采用FFT演算法,對各個IMF分量進行計算,獲取IMF分量頻率資訊,確定頻率突變點,選擇相關模態。透過累計相關模態得到訊雜比提升後的訊號。
透過仿真訊號,驗證了該方法的可行性和有效性,對不同訊雜比的仿真訊號的訊雜比提升結果表明,該方法能夠有效地去除訊號中的雜訊資訊,優於常用的EMD、WT-45db和S-G演算法。
最後進行了10μg/L六價鉻樣品,LIFs實際分析訊號信噪,比提升處理實驗,結果表明,該方法能夠有效地降低高斯白雜訊和高頻雜訊,保留有用訊號,提高LIFs訊號的訊雜比,這有助於提取LIFs傳感訊號的峰值資訊,提高後續基於LIFs原位檢測地下水中重金屬濃度的準確性。











