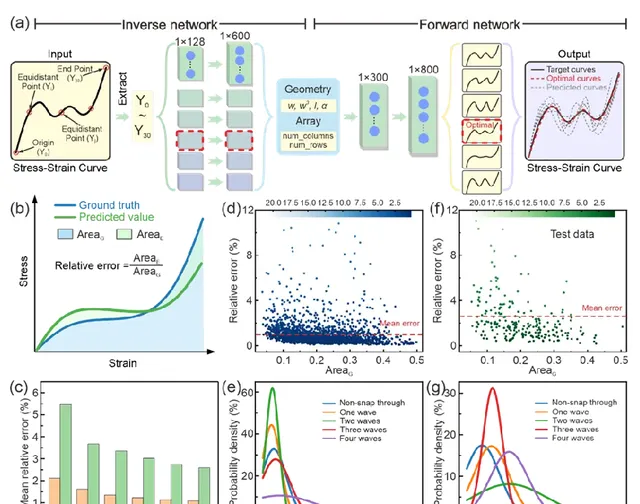
近日,華中科技大學丁漢院士和吳誌剛教授團隊, 基於機器學習和有限元分析,提出一種超材料逆向設計方法,測試集平均準確率達 98.92%。

圖 | 吳誌剛(來源:吳誌剛)
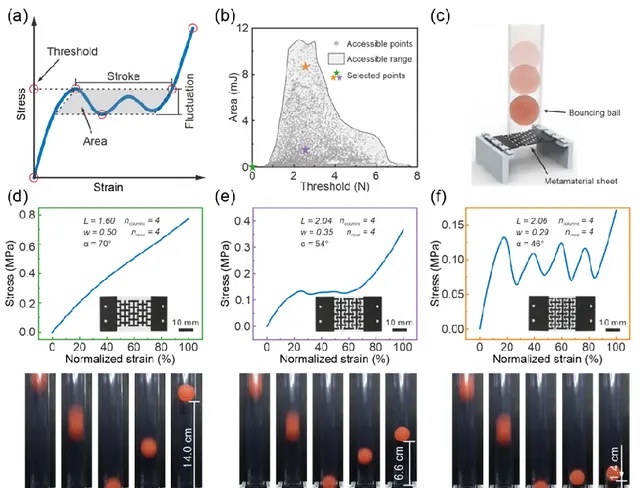
透過精確地調控結構的應力應變曲線,該方法可以解決超材料設計中參數復雜、幾何變形非線性、以及材料本構非線性等問題帶來的挑戰。
並能取得與實驗和仿真結果相匹配的高準確度結果,有助於引領超材料設計領域的發展,以及助力機械智慧系統的發展。
對於柔性力學超材料來說,它往往擁有輕量化、高強度、化石相容性、快速響應性、良好的減震性、以及較高的環境順應性。
故可被用於抗震建築、輕量化結構、生物醫學植入物、具身智慧機器人等領域。
在抗震建築領域,柔性力學超材料能夠發揮良好的減震效能,從而能夠增強建築物的抗震效能。
在輕量化結構領域,柔性力學超材料能被用於制造輕量化、高強度的航空航天器結構,從而能夠提升飛行器的效能和燃料效率。
在生物醫學植入物領域,柔性力學超材料能被用於制造耐久性更好、化石相容性更高的植入物,比如用於制造人工關節和骨修復材料等。
在具身智慧機器人領域,柔性力學超材料能被用於制造靈敏度更高、環境適應力更強的機器人,從而能夠更好地適應復雜環境、更好地執行精細任務。

根據套用物件,實作按需逆向設計
當前,不少科研人員都在嘗試將研究內容與 AI 結合。然而,對於柔性力學超材料結構設計這一領域來說,它與 AI 相結合的起步較晚。領域內的大部份學者也傾向於在現有體系之下進行創新。
據介紹,傳統結構設計方法是一種正向設計方法,即是一種從結構到效能的方法,要想實作具有特定力學效能的結構,通常需要不斷地試錯。
而逆向設計方法,則是一種從效能到結構的方法,它可以最佳化結構設計的叠代流程、縮短設計周期,從而加快產品開發速度。
然而,在逆向設計中,結構力學效能與其結構參數之間的數學關系更為復雜。因此, 該團隊決定將 AI 和結構設計結合,以期實作柔性力學超材料的逆向設計。
憑借逆向設計的高效、低成本特點,配合柔性力學超材料行為可編程特性,將有助於更快、更好地實作機械智慧。
(來源:Advanced Materials)
此外,AI 也能幫助突破柔性力學超材料設計中的已有難題:
首先,對於拓撲最佳化、等幾何最佳化、有限元分析等傳統結構設計方法來說,它們都是從數學邏輯出發,不僅計算成本較高,泛用性也有待增強。而 AI 則能降低逆向設計的成本、以及提高泛用性。
其次,在柔性力學超材料的設計中,通常會涉及到大量的結構參數。而 AI 可以幫助人們從復雜數據中提取新特征,從而發現某些依靠人力難以發現的數學規律,進而提高設計效率。
再次,在現有的柔性力學超材料設計方法中,人們很少考慮非理想的結構構型、非線性的大變形、以及非線性的材料本構模型等因素。
透過 AI 方法解決這些非理想因素引入帶來的復雜性,將有助於提高設計的精確度、以及提高設計方法的有效性。
對於傳統的真人機械結構設計師來說,他們往往是「越老越吃香」。即設計的結構越多,經驗也就越豐富。
但這也反映了結構設計領域非常依賴設計經驗的問題。而對於善於分析大量數據的 AI 來說,這其實是一個能夠施展拳腳的舞台。
即透過大量地學習數據和經驗,AI 能夠總結高度非線性數學關系中的規律,來幫助人類實作快速的設計。
因此,當把基於數學邏輯的傳統方法,與基於數據驅動的 AI 技術兼收並蓄,就能讓不同設計方法互為補充,突破柔性力學結構設計中的難題,實作高效率、高準確性的柔性力學超材料的設計。
但是,如前所述,柔性力學超材料本身存在構型不夠理想、非線性大變形、以及非線性本構模型等問題。
而透過有限元分析高精度模擬非理想、非線性的約束,結合機器學習擬合高度非線性的數學關系,讓該團隊得以在本次研究之中,根據套用物件實作按需的逆向設計。

先從搞定復雜材料做起
具體來說,課題組將電腦仿真技術與機器學習演算法加以結合,利用基於數學邏輯的仿真生成的數據,來訓練機器學習模型,借此定下了逆向設計的思路。
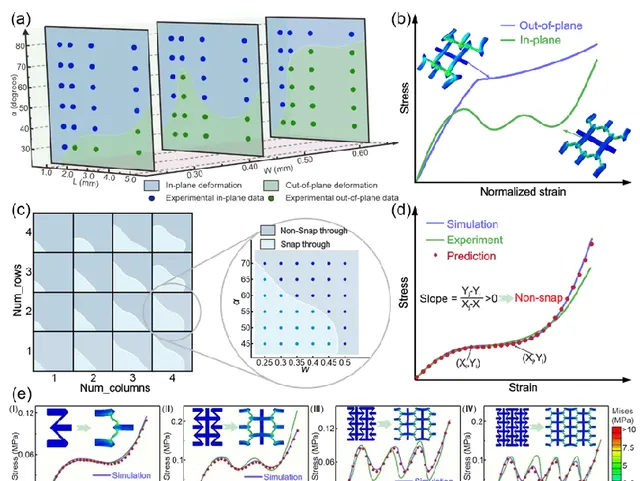
生成精確仿真數據的第一步,便是精確刻畫材料的本構模型。
事實上,對於任何一種材料來說,它在變形時的行為,都是彈性行為、黏性行為和塑性行為的組合。
而在針對不同材料進行嘗試之後,該團隊決定使用熱塑性聚氨酯來作為基礎材料。
原因在於:其擁有較好的彈性和塑性。在受到不同速率施加的外力作用時,還能表現出不同的變形黏性,並且變形時的力學行為更為復雜。
既然熱塑性聚氨酯材料這麽「復雜」,那麽假如能夠針對它的結構實作精確設計,那麽對於其他具有相似復雜度、或者復雜度更低的材料結構來說,必然能夠帶來一定參考。
(來源:Advanced Materials)
而為了確保仿真結果能夠準確地反映現實中的實驗結果,他們不斷地調整實驗假設與仿真設定。
在此基礎上,他們利用 Python 指令碼,開展了大規模的計算處理和數據處理,生成並分析了大量仿真數據。
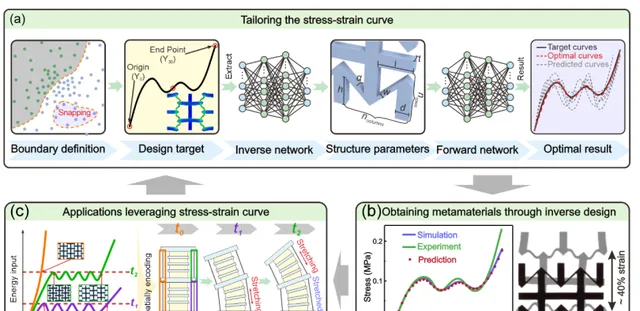
完成數據的收集和處理之後,課題組開始構建逆向網路和正向網路,以便實作柔性力學超材料的逆向設計。
(來源:Advanced Materials)
對於逆向網路來說,它可以學習從目標效能到材料結構的對映關系,從而能夠根據給定的目標效能參數,直接生成相應的材料結構。
對於正向網路來說,它可以學習從材料結構到材料效能的對映關系。
這時,針對逆向網路所生成的設計方案,正向網路就能檢驗這一方案能否滿足預期效能,並針對設計結果進行驗證和最佳化,從而確保設計方案的可行性和可靠性。
這樣一來,逆向網路與正向網路的結合,就能快速地生成新型材料設計方案,從而滿足特定的效能要求。
(來源:Advanced Materials)
日前,相關論文【基於數據驅動的逆向設計調控柔性力學超材料的應力應變曲線以按需實作其不同力學響應】(Tailoring Stress-strain Curves of Flexible Snapping Mechanical Metamaterial for On-demand Mechanical Responses via Data-driven Inverse Design)以為題發在 Advanced Materials (IF 27.4)。
華中科技大學博士生柴治平胡宗子盛是第一作者,吳誌剛擔任通訊作者 [1]。
圖 | 相關論文(來源:Advanced Materials)

讓真人材料工程師和 AI 並肩協作
總的來說,本次課題是該團隊基於仿真數據和機器學習方法,所實作的第一個柔性結構逆向設計工作。
但它仍舊存在一定的不完美之處:比如結構構型和變形行為還比較單一。
因此,後續他們將繼續圍繞可變形柔性結構的逆向設計開展研究。
以人體關節為例,盡管我們無法精確地到控制每一個關節的動作,但當主動型關節動作和被動型關節動作加以結合,則能產生驚人的效果。
而這正是人類能夠靈活跑跳和操作工具的原因所在。事實上,這也正是機械智慧的魅力所在。
因此,該團隊希望透過設計具有各種動作行為的柔性結構,並將它們組合起來,從而形成完整的運動機構,進而能像人體關節一樣靈活運作。
而為了拓寬設計空間、以及實作動作行為多樣化的柔性結構設計,他們還將進一步探索壓縮行為、切變行為、彎曲行為和扭轉行為。
希望能夠完善柔性結構的逆向設計體系,為傳統機械結構設計領域提供全新的思路,最終實作具有機械智慧的柔性結構的設計。
此外,本次工作所采用的生成式 AI 模型,是一款較為初級的模型,對於算力的要求並不算高。
而對於編碼解碼器和擴散模型等復雜生成式 AI 模型來說,它們已經經過了一定考驗。
盡管它們的算力要求更高,但是所生成的設計方案也更豐富、更可靠。因此,該團隊也正在考慮使用更先進的生成式 AI 模型。
最終,課題組希望能將 AI 的數據分析能力和邏輯推理能力加以結合,從而能夠針對設計需求進行深度理解,讓真人材料工程師可以和 AI 並肩協作,創造出具有卓越效能的機械結構。
除了研究柔性結構設計之外,課題組也在探索 AI 智慧植物系統、基於 AI 的觸覺感知系統、基於 AI 的適應力抓取方法、以及基於 AI 的柔性機器人動作規劃等方向 [2]。
總體而言,從柔性機器人的結構、到傳感、再到控制方法,該團隊希望能夠充分地結合 AI 技術,開發出一系列相輔相成的具身智慧技術。
參考資料:
1.Chai Z, Zong Z, Yong H, et al. Tailoring Stress‐strain Curves of Flexible Snapping Mechanical Metamaterial for On‐demand Mechanical Responses via Data‐driven Inverse Design. Advanced Materials , 2024: 2404369.https://doi.org/10.1002/adma.202404369
2.http://www.softintel.top/journal.html











