在2024年的WAIC世界人工智能大会上,国家地方共建人形机器人创新中心发布了全球首款全尺寸通用人形机器人开源公版机「青龙」,公司的基本情况想必大家都知道在此做简单的阐述:
产品公司简介 :青龙产品由人形机器人(上海)有限公司自主研发,该公司是国家地方共建人形机器人创新中心新设立的开源人形机器人公司,注册资本10亿元。
产品主要参数情况 :身高185cm,体重80kg,43个主动自由度,最大关节峰值扭矩396Nm,算力支持400Tops。
产品亮点 :高度仿生构型,拟人化运动控制,支持多模态交互和操控,开源技术,具备快速行走、敏捷避障、稳健上下坡、抗冲击干扰等运动功能。
一、整体系统组成说明
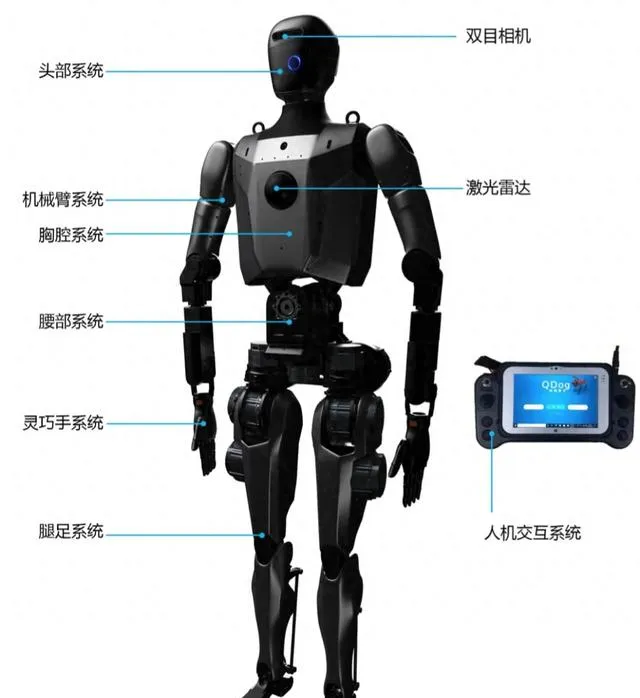
青龙全尺寸通用人形机器人包括头部、胸腔、手臂、灵巧手、腰部、腿足等6个大类10多个系统组件组成。
二、主要硬件位置和技术路线简述
1、外部感知配置:
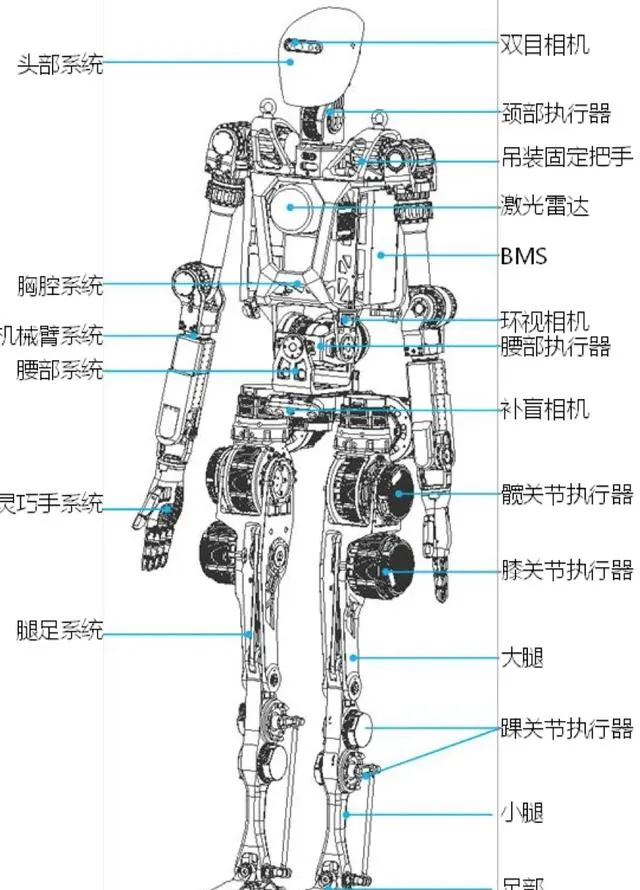
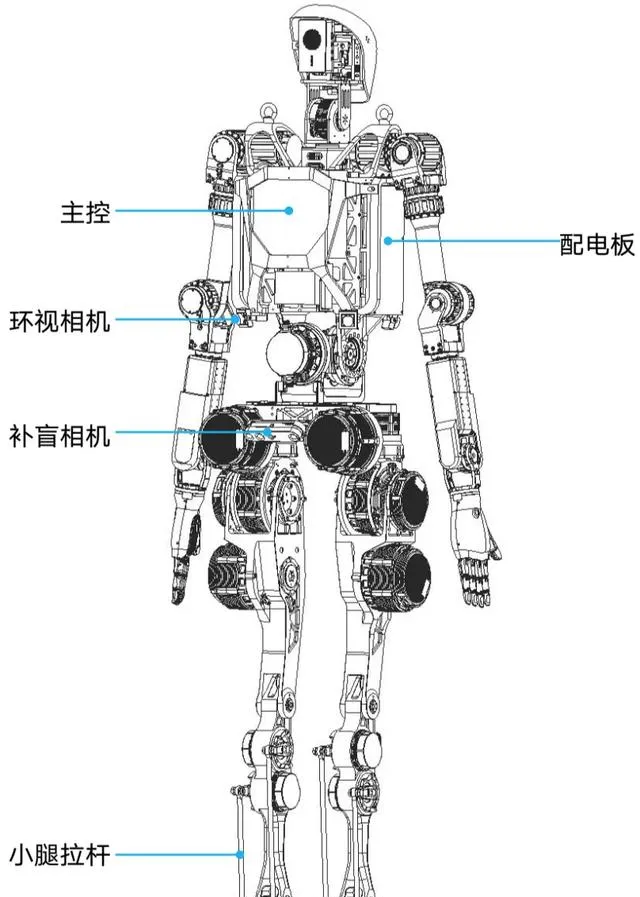
头部配备一个双目相机,在髋和腰之间前后各配备一组补盲相机,在胸腔和腰部前后各配备2个单摄的环视相机(依照视场角有可能各配一个广角鱼眼相机也可以),最后在胸腔前方配置一组激光雷达。
2、上身结构和技术路线
包括颈部的2个执行器和双臂14个执行器都是旋转执行器,现场交流看大概率采用的是无框力矩电机+谐波减速器方案。
3、下身结构和技术路线
下身创新性的采用了轴向磁通电机+行星减速器方案,最大关节峰值扭矩396Nm,当然在论坛大会上也考虑在二代上使用行星滚柱丝杠的直线执行器方案,这个有待跟踪确认。
4、控制系统说明
无论是主控还是电池BMS系统、热管理,主电池等都放在胸腔内,组成大脑和小脑控制中枢。
三、自由度分配和详细部件配置说明
1、全身自由度分布情况

青龙跟其他双足机器人的自由度分布类似,整体看头部2个自由度主要是俯仰和左右扭头动作,单腿6个主动自由度分别分布在髋关节、膝关节和踝关节,腰部3个自由度俯仰、侧摆和左右周转,手臂和腿的自由度分配参见下图所示:

2、灵巧手解析
单只灵巧手有19个自由度,6个主动自由度主要是大拇指2个,其他四个手指各1个,细分来看大拇指有 3 个自由度(2 个主动自由度),可实现主动弯曲伸展与主动侧向摆动,四个手指各有4个自由度(1 个主动自由度),可实现主动弯曲伸展与被动侧向摆动,整手重量不超过600g,单指负载不小于 15N,整手负载(四指握拳式)不小于 5kg。

3、产品的底层驱动
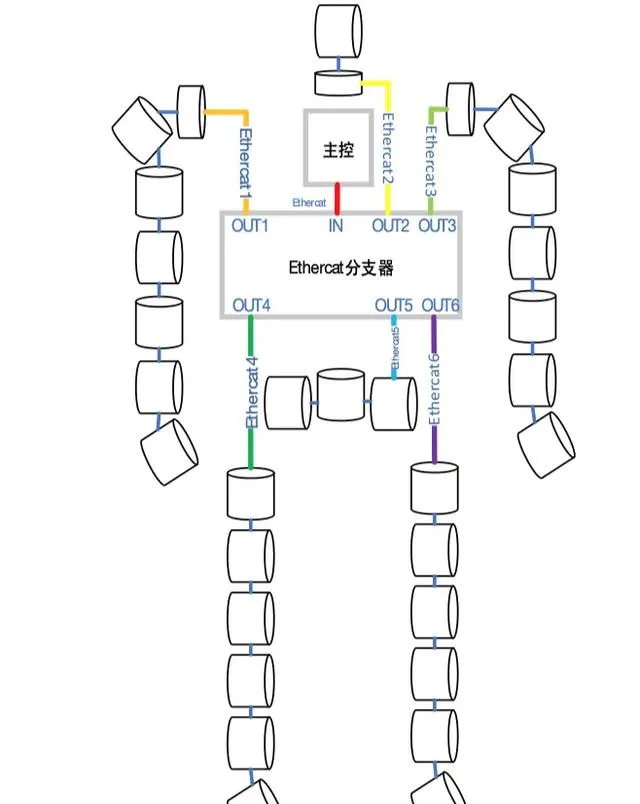
整个人形机器人是基于EtherCAT总线的底层驱动,具有实时性高、扩展性强、可靠性高的特点,提供关节层控制接口,可实现对机器人的每一个关节的力矩、位置、速度控制。
声明:文中所列图片均来自上海人形机器人有限公司人工智能大会现场演讲资料和产品说明文档,如有侵权和使用不当请及时联系删除,只做交流学习,感谢您的理解。
往期阅读推荐:
往期阅读推荐链接文末,
如果你感兴趣,欢迎大家点赞关注留言;
如果你需要服务,可以私信联系我们;
如果你志同道合,欢迎大家联系我,共同交流学习进步。











