2023 年,美国自动驾驶公司 Cruise 在美国旧金山发生交通事故,再次引发人们对自动驾驶安全性和可靠性的讨论和担忧。
多年以来,自动驾驶因有望引起交通范式变革,而引起广泛的关注。但问题是,自动驾驶何时能大规模商业落地?
对于如何测试和评估自动驾驶的安全性,领域内并没有形成统一的共识和行业标准。美国兰德公司研究报告显示,自动驾驶汽车经过 110 亿英里(约 180 亿公里)的测试后,才有可能达到安全的理想状态。
这个「百亿公里」难题如果在自然条件下完成,无论环境复杂度还是其他各种因素都充满挑战,这也成为制约自动驾驶应用落地的瓶颈难题。
清华大学助理教授封硕总结其背后的科学问题,并提出「连续时空智能环境测试」的全新思路,创立了「自动驾驶汽车等效加速测试」理论与方法体系,突破片段化场景测试的局限性,为自动驾驶测试的低效率难题提供解决方案。
凭借
首次揭示自动驾驶汽车安全性挑战背后的科学难题——稀疏度灾难,开辟基于生成式人工智能的安全性加速测试与可持续学习框架,将仿真与实车测试速度提高 3 至 5 个数量级
,封硕成为 2023 年度【麻省理工科技评论】「35 岁以下科技创新 35 人」 中国入选者之一。

为解决测试低效率难题提供理论基础
封硕本科和博士毕业于清华大学自动化系,博士导师为张毅教授。之后 5 年,他作为联培博士、博士后、助理研究员,在美国密西根大学刘向宏(Henrry X.Liu)教授课题组学习和工作。
随着博士期间研究的深入,原本从事多智能车队控制研究方向的封硕发现,自动驾驶汽车的大规模落地应用面临巨大的难题,而在解决此难题之前,基于自动驾驶规模化应用的多智能车研究多数停留在纸面,难以取得实质性进展。
于是,他在博士四年级毅然转变了学术方向,开始聚焦于自动驾驶汽车的安全性测试问题研究。
并且,按照由简至繁、逐步深入的研究方法,先后聚焦「单点级」「路段级」与「路网级」测试环境生成问题。
为解决高维问题所带来的困难,他进一步将场景生成问题表述为一个马尔可夫决策过程问题,并开发了一种强化学习算法,通过评估其情景临界性来学习临界行为。
针对单点级单车交互驾驶环境,提出了基于重要性的关键度采样理论,为解决测试低效率难题提供了理论基础。在此基础上,提出单点单车测试环境生成方法,显著加速了单点单车测试过程[1-3]。
相关成果获得了 2020 年度电气与电子工程师协会智能交通系统学会最佳博士学位论文奖(智能交通领域权威博士论文奖,全球每年仅评选三篇)。
「我与所在课题组从零开始探索自动驾驶测试场景生成,以能够更好、更快地测试自动驾驶的安全性。在这个研究阶段,我们找到了数学工具对自动驾驶安全性进行求解,并初步验证。」封硕说。
需要了解的是,自动驾驶的测试分两个阶段。第一个阶段是片段化场景,主要是门槛性测试。第二阶段是时空连续的交通流测试,以挖掘自动驾驶复杂的交互场景下的安全性能。

(来源:密西根大学)
博士后期间,他意识到,当自动驾驶能力越来越高级后,片段化场景就无法满足自动驾驶安全性的评测。于是,封硕开始研究从理论上推广到更复杂的场景,面向路段级多车交互驾驶环境。
基于此,他以独立一作身份,在 Nature Communications 提出了「稀疏对抗采样」理论,即自然-对抗驾驶环境可以在任何驾驶环境中为测试自动驾驶持续生成测试场景,解决了重要性采样理论的「维度灾难」。
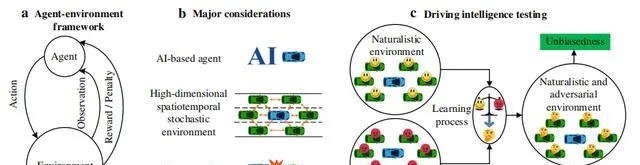
图丨使用自然-对抗驾驶环境进行驾驶智能测试(来源:Nature Communications)
在此基础上,首次提出路段多车测试环境生成方法,显著提升了连续时空复杂环境下汽车安全性测试能力[4]。
具体来说,由于场景生成的基本输入来自自然驾驶数据,因此,在测试轨道上的测试里程可以近似转换为与道路自然驾驶环境相同的等效里程。
由于具有挑战性的场景显著增加了安全关键案例的暴露率,在测试轨道上测试 1 英里,可能相当于在公共道路上行驶数百甚至数千英里。
相关论文作为精选文章入选 Nature Communications 「人工智能和机器学习」专题,并获得美国运筹学和管理学研究协会「2021 年度智能交通系统最佳论文奖」。

自动驾驶安全领域在 Nature 正刊发表的首篇论文
2022 年,封硕回到母校清华大学担任助理教授、博士生导师,研究方向为智能系统测试验证。
他针对路网级多车交互驾驶环境,提出了密集强化学习理论,为人工智能技术在高维空间小概率事件优化中所面临的「稀疏度灾难」(Curse of Rarity)提供解决方案。
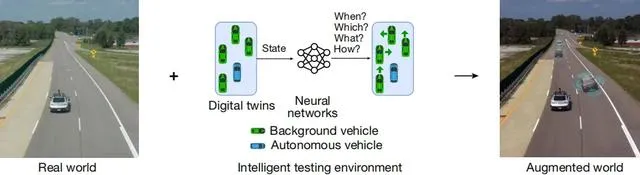
在此基础上,提出路网多车测试环境生成方法,实现了测试环境的智能化生成,通过智能环境与自动驾驶之间的「AI Against AI」方法[5]。
该方法显著提升了大时空尺度下自动驾驶汽车安全性测试能力,将测试过程提升 3 至 5 个数量级(1000 倍至 10 万倍)。 有望大幅度降低自动驾驶测试与研发成本,加速推动其落地应用的速度。

图丨Nature 当期封面(来源:Nature)
自动驾驶公司 Google/Waymo 评价该研究「加速了系统验证过程」「显著降低了所需要的测试里程」。
在该研究中,通过密集深度强化学习方法,允许神经网络通过安全攸关事件从密集信息中学习,并实现传统深度强化学习方法难以完成的任务。该方法的优越性在理论上得到了证明,并通过在高速公路测试轨道上测试高度自动化的车辆。
(来源:Nature)
2023 年 3 月,相关论文作为封面论文,以【基于密集强化学习的自动驾驶汽车安全性测试】(Dense Reinforcement Learning for Safety Validation of Autonomous Vehicles)为题发表于 Nature 。
封硕是第一作者,密西根大学刘向宏教授担任通讯作者。据悉,是自动驾驶安全领域在 Nature 正刊发表的首篇论文。

图丨相关论文(来源:Nature)
「AI Against AI」的全新理论与方法,有望形成新一代机器智能的测试与研发范式,对安全攸关系统的大规模落地应用产生巨大影响力,包括自动驾驶、航空航天、医疗机械、智能核电、智能电网等。
封硕表示,基于该研究,未来用 AI 帮助 AI 有可能形成一种教学相长的过程。其中一个 AI 是教练,另一个 AI 是学生,需要二者互相促进来提升能力。
真实交通环境中事故非常罕见,人类事故率一般在 10-6 甚至更低,如何高精度建模这种长尾小概率事件一直是领域的难点。封硕与合作者利用生成式的方法产生高精度自然驾驶环境,让智能测试环境更接近真实[6]。
封硕表示:「通过一系列研究我们发现,自动驾驶安全性测试和安全性训练就像一个硬币的两面。如果不知道算法的安全性和量化性能,就不知道算法是否提升,也就不知道如何提升安全性。」

将积极探索高价值数据生成方向
封硕表示,走上科研道路,离不开学校的引导、两位导师的言传身教和家人的支持。
他说:「张毅教授鼓励我作为联合培养博士,帮助我开拓全新的博士课题;在我回国任教后,支持我建立自己的实验室。而刘向宏教授则‘手把手’带我走进自动驾驶领域。」
让封硕印象最深刻的是「完全沉浸式」的论文撰写模式,他曾连续 3-5 天在办公室与刘教授面对面地撰写和修改论文,并通过沉浸式思考和讨论,来提升对问题的认识和理解。该方法效率极高,也成为封硕阶段性的工作模式。

图丨封硕在中国科技青年论坛(来源:封硕)
目前,自动驾驶汽车商业化「姗姗来迟」进入到 L3 时代,然而 L3 无法根本性改变交通格局。封硕认为,现阶段距离自动驾驶安全性能到大规模商业 L4 乃至 L5 的落地,大约还有 1 到 2 个数量级的差距。
他表示,自动驾驶领域没有达到预期的发展进度,根本原因是存在尚没有解决的关键科学难题,而突破这些难题仅靠产业的力量是不够的,需要学术界的共同努力。
另一方面,产业的发展也需要监督,安全性是涉及人类社会的大事,随着 AI 技术发展的突飞猛进,AI 安全性问题的重要性也日益凸显。
「作为该行业的科研工作者,要争取先于产业洞察这些潜在的行业瓶颈,提前布局开展学术研究,为产业发展扫清障碍。」他说。
目前,封硕正在推进相关技术的产业化落地。依托交通大数据与大模型技术,构建面向自动驾驶安全性测试与训练的交通行为大模型,以实现高保真、强交互、大时空尺度的交通行为仿真。
其关注的场景包括:通过生成智能测试交通环境,加速自动驾驶汽车安全性仿真测试;通过生成高价值训练数据和密集学习算法,加速自动驾驶训练效率。
现阶段,特斯拉通过实际采集方式收集自动驾驶数据,但需要了解的是,其中只有万分之一是有价值的数据。最近,构建端到端的能力成为广泛讨论的话题。
「如果没有高价值数据生成,很难让自动驾驶的整个系统转起来,所以这也是我们未来将重点研究的方向,希望能够加速自动驾驶 L4/L5 时代的到来」
谈及研究中的创新要素,封硕认为,不过于留恋「低垂的果实」。研究如同深山寻宝,当取得一定突破后,不急于「安营扎寨」,而是要勇于继续上路,再出发深入「无人区」,努力去探索最后的宝藏。
参考资料:
1.Feng, S., Feng, Y., Yu, C., Zhang, Y. and Liu, H.X., 2020. Testing scenario library generation for connected and automated vehicles, Part I: Methodology. IEEE Transactions on Intelligent Transportation Systems, 22(3), 1573- 1582.
2. Feng, S., Feng, Y., Sun, H., Bao, S., Zhang, Y. and Liu, H.X., 2020. Testing scenario library generation for connected and automated vehicles, Part II: Case studies. IEEE Transactions on Intelligent Transportation Systems, 22(9), 5635-5647.
3. Feng, S., Feng, Y., Sun, H., Zhang, Y. and Liu, H.X., 2020. Testing scenario library generation for connected and automated vehicles: An adaptive framework. IEEE Transactions on Intelligent Transportation Systems, 23(2), 1213-1222.
4.Feng, S., Yan, X., Sun, H., Feng, Y. and Liu, H.X. Intelligent driving intelligence test for autonomous vehicles with naturalistic and adversarial environment. Nature Communications , 12, 748(2021). https://www.nature.com/articles/s41467-021-21007-8
5.Feng, S., Sun, H., Yan, X. et al. Dense reinforcement learning for safety validation of autonomous vehicles. Nature 615, 620–627 (2023). https://doi.org/10.1038/s41586-023-05732-2
6.Liu, H.X., Feng, S. Curse of rarity for autonomous vehicles. Nature Communications 15, 4808 (2024). https://doi.org/10.1038/s41467-024-49194-0
运营/排版:何晨龙











