在当前的自动驾驶技术领域,纯视觉人工智能驾驶和雷达智能驾驶是两种主要的技术路线。这两者各有优劣,争论也一直未停。本文将探讨纯视觉人工智能驾驶是否优于雷达智能驾驶。

纯视觉人工智能驾驶主要依赖摄像头和图像处理算法。这种方式的一个显著优势是成本较低。摄像头相对便宜,安装简单,并且维护成本低。这使得纯视觉方案在经济上更具吸引力,尤其是对于大众市场的车辆。
此外,摄像头可以捕捉丰富的环境信息,包括颜色、材质、文字等,这些信息对于理解复杂的城市道路环境非常有帮助。视觉系统还能够识别交通信号灯、标志牌、行人和其他道路使用者,这对安全驾驶至关重要。
视觉系统的另一个优势在于其分辨率高,可以提供细致的图像。这使得视觉系统在辨别小物体和远距离物体方面表现优异。例如,纯视觉系统能够更早地发现前方道路上的小型障碍物或远处的行人,从而及时采取措施,避免事故发生。
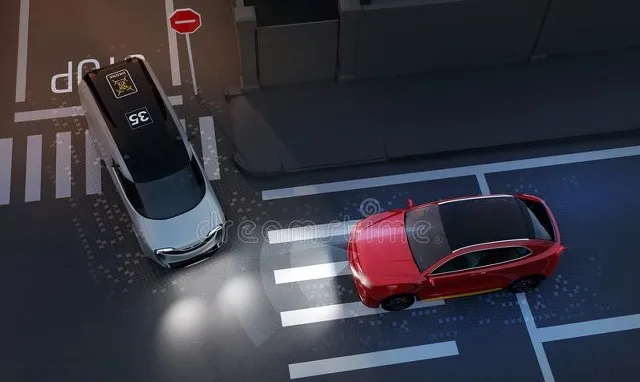
相比之下,雷达智能驾驶依赖激光雷达(LiDAR)和毫米波雷达。这些传感器通过发射并接收反射信号来探测环境,生成三维地图。雷达系统的一个主要优势是其在恶劣天气条件下的稳定性。无论是大雨、大雪还是浓雾,雷达系统都能提供可靠的数据,而视觉系统在这些情况下可能会失效或表现不佳。
雷达系统还具有较强的穿透能力,可以透过薄雾、烟雾和其他障碍物探测到后方的物体。这在一些复杂的交通场景中尤其重要。例如,在高速公路上,如果前方有大车阻挡视线,雷达系统依然可以探测到大车前面的情况,从而为车辆的决策提供依据。
另一个优势是雷达系统的测距精度高。激光雷达可以精确测量物体的距离和速度,这对于实现高精度的自动驾驶至关重要。特别是在高速行驶或紧急制动情况下,雷达系统的高精度测量可以确保车辆及时做出反应,避免碰撞事故。

尽管纯视觉和雷达各有优势,但在自动驾驶技术的发展过程中,两者的结合可能才是最佳方案。纯视觉系统虽然在识别和分类方面表现优异,但在测距和恶劣天气条件下存在一定的局限性。而雷达系统则弥补了这些不足,提供了更稳定和精确的环境感知能力。
近年来,许多自动驾驶公司开始采用多传感器融合技术,将摄像头、激光雷达、毫米波雷达和其他传感器的数据综合起来,形成更全面和准确的环境感知系统。例如,特斯拉的Autopilot主要依赖摄像头,但也使用了超声波雷达和毫米波雷达;Waymo的自动驾驶汽车则采用了摄像头、激光雷达和毫米波雷达的多传感器融合方案。
纯视觉人工智能驾驶和雷达智能驾驶各有其独特的优势和局限。在某些特定场景下,纯视觉系统可能表现得更好,而在其他场景下,雷达系统则更具优势。对于自动驾驶技术的发展,最优的解决方案可能是结合两者的优势,通过多传感器融合来实现更安全、更可靠的自动驾驶体验。因此,单纯依赖纯视觉或雷达智能驾驶并不能全面满足自动驾驶的需求,综合利用多种传感器技术才是未来发展的方向。











