
给你十个亿个脑洞,你也想不到,世界上第五个登月国家的着陆器,是这样特殊的方式登陆的。更绝的是,这艰难的情况,着陆器还释放了俩小机器人,正常执行任务,还拍下了自己的糗样。
1 月 20 日凌晨,日本的小型月球探测器「月球狙击手」机器人,历经 4 个半月的漫长旅程,成功登上月球,成为继苏、美、中、印之后,第五个让航天器在月球软着陆的国家。但科学家们很快发现情况不对,电池电量怎么直线下降?这意味着电池根本没在充电!
还好两个小机器人已经从着陆器上顺利下来了,科学家们一边着急地找电池不充电的原因,一边操作两个机器人完成既定任务,看看着陆器到底咋回事。
遥测传回的数据显示,着陆器的太阳能电池板朝西,接收不到阳光,但这也给了科学家一丝希望,因为随着月球上太阳的移动,阳光终有一天会照到电池板,为其充电。不过,月球的一天相当于地球上的 14 天,阳光要从西边照到电池板需要很长时间,所以科学家在着陆器电量只剩 12%时关闭了它,看看之后能不能再充电。
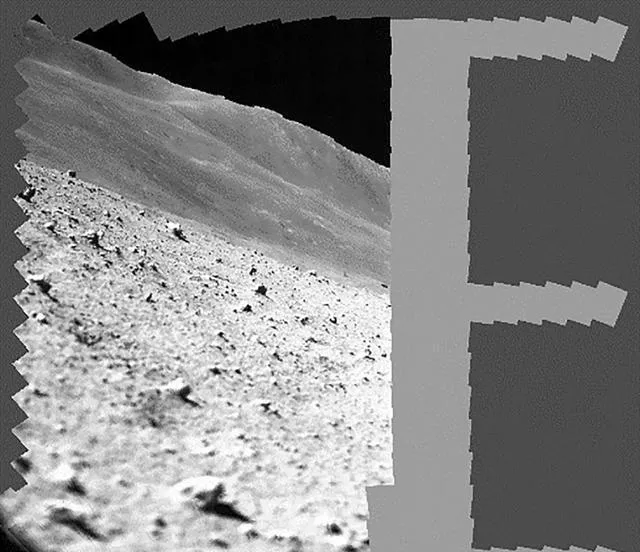
好在 LEV-1 漫游车配备了通信系统,可以直接和地球联系,它能在月面跳跃前进,并拍摄周围的低分辨率照片。LEV-1 在数天内拍了 257 张照片传回地球,科学家们拼接这些照片后,发现了一个让他们目瞪口呆、完全没想到的情况:着陆器竟然是大头朝下、四脚朝天着陆的,怪不得太阳能电池板接收不到阳光!

哇塞,这可能是太空探索史上最奇葩的软着陆方式了吧!科学家们检查数据后发现,着陆器的一个推进器喷嘴在离月面 50 米时,好像异常关机了,这使得它的姿态失控,最后就一头栽向了月面。
但是,月球狙击手创造了一些纪录。除了是全球第五、本世纪中印之后第三个登上月球的国家外,它还是最精确着陆的探测器,位置误差仅为 55 米,这表明此次开发的精确着陆技术是成功的。由于月球上没有 GPS,之前的探测器,包括阿波罗飞船,只能在月球表面大致区域着陆,误差甚至达到几公里,也就是「能着陆的地方着陆」。
但月球狙击手是要在「想降落的地方降落」,为此它借助月面识别技术,根据下降时不断拍摄照片和此前月球轨道器获得的数据进行对比,来修正降落方向,力求达到 100 米内的高精度降落,很明显这个最大目标已经圆满完成,即便在一个主推进器失效的情况下也是如此。
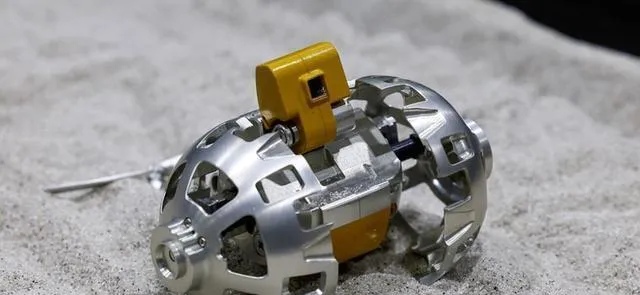
另外,LEV-1 和 LEV-2 是日本首个月球漫游机器人,LEV-1 用跳跃方式行进,LEV-2 则用变形方式前进,真有创意。因为 LEV-1 能和地球直接通信,所以它也被认为是目前最小、最轻但距离最长的直接数据传输案例。

那么这几个小机器人之后会怎样呢?LEV-1 已经没电了,现在处于待机状态,科学家还在监听它的信号,等太阳出来给它充电。LEV-2 现在什么情况还不清楚。着陆器的科学家没放弃,希望它能撑过这个寒冷的月夜,等太阳再升起的时候能充上电。











