作者 | 芝喆
出品 | 焉知人形机器人
目前自动驾驶行业的发展在一定程度上已经出现了一些疲软的迹象。一方面,自动驾驶技术的商业化进程相对缓慢,部分原因包括技术难题尚未完全解决、法律法规和政策尚未完善、用户接受度和信任度还不够等。另一方面,自动驾驶领域的竞争日趋激烈,各大企业和初创公司都在争夺有限的市场份额和资源,导致一些公司可能面临资金紧张和技术挑战。
在这样的背景下,转向智能机器人研发可能是一个有意义的选择。智能机器人领域具有广阔的应用前景,包括个人服务机器人、医疗护理机器人、教育培训机器人、工业生产机器人等。相比之下,智能机器人的应用场景更为多样化,商业化路径更为清晰,有望更快地实现商业化落地。
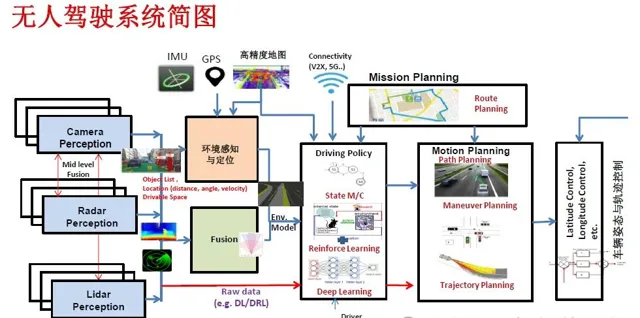
图1(a)自动驾驶系统工作原理图
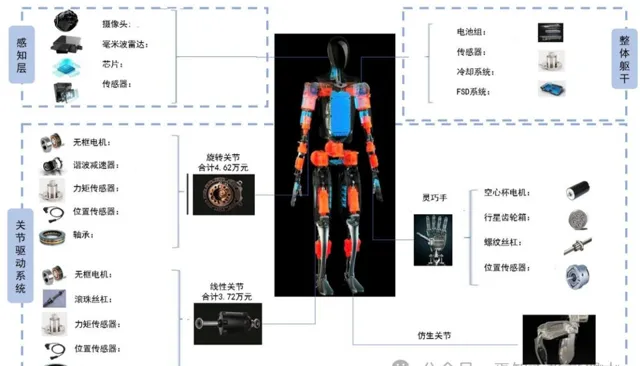
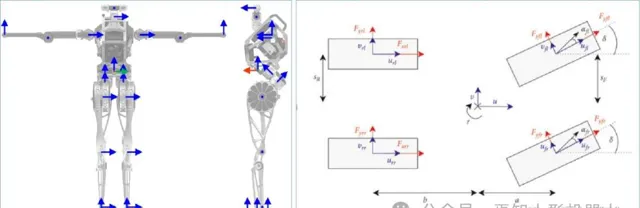
图1(b)智能机器人工作模块实现原理
本文将详细介绍如何从智能驾驶研发岗位转到智能机器人需要具备哪些技能要素,以及如何才能从入门转型为一名合格的智能机器人研发工程师。
相较于自动驾驶行业,智能机器人研发同样面临一系列挑战, 包括人机交互技术、感知与决策能力、运动控制与规划等方面的技术难题,以及市场竞争和商业模式创新等方面的挑战。 因此,在考虑转向智能机器人研发时,企业需要充分评估市场需求、技术实力和竞争环境,确保能够抓住机遇并取得成功。而工程师个人则需要需要具备跨领域的知识和技能,包括机器人学、人机交互、计算机视觉、人工智能等方面的知识。同时也需要具备持续学习和创新的能力,以适应快速发展的技术和市场变化。
实际上,自动驾驶汽车都可以看成是一种特殊的机器智能体或智能机器人。 但是,自动驾驶车辆和智能人形机器人的应用场景和技术要求有所不同,对智能人形机器人进行系统架构设计时,但它们都面临着 一些共同 的挑战和难题。
智能人形机器人通常需要执行各种复杂的任务,如陪伴、助力、服务等,需要在不同的环境和场景中适应变化。因此,系统需要具备一定的智能和学习能力,能够根据任务需求和环境变化做出适当的调整和改进。
智能人形机器人的开发同样面临着诸多挑战和难题, 其中一些与自动驾驶车辆类似。 然而,由于两者的应用场景和技术要求不同,因此在具体的技术解决方案和应用策略上可能会有所差异。
1、适应复杂的任务和环境
在适应复杂的任务和环境方面,自动驾驶车辆和智能机器人存在一些区别:
在执行任务复杂性方面,自动驾驶车辆的任务相对单一 ,主要是在道路上安全地行驶到目的地。虽然道路交通环境复杂多变,但是自动驾驶系统的主要任务是遵守交通规则、避让障碍物等,相对来说更加可控。
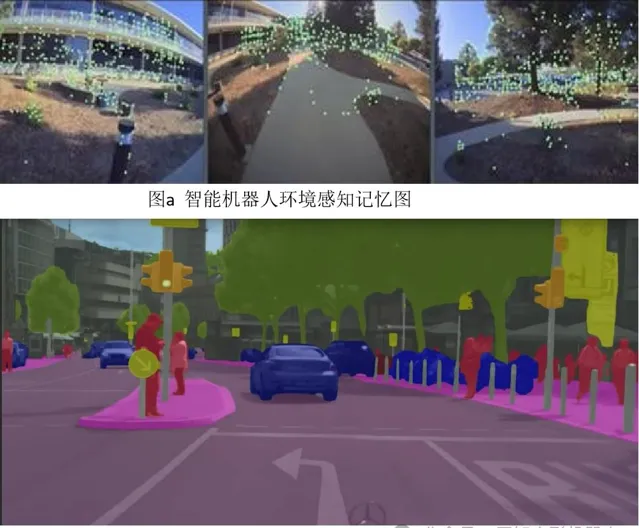
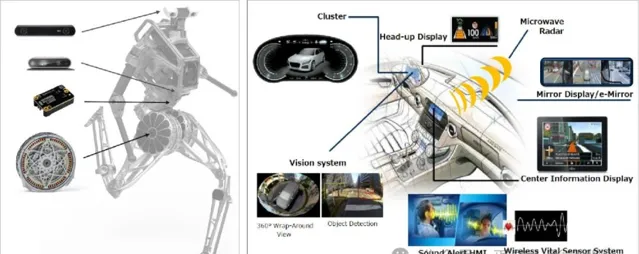
图2 智能汽车环境感知和智能机器人环境感知
而智能机器人的任务通常更加复杂多样 ,涉及到环境感知、路径规划、物体识别、人机交互等多个方面。智能机器人可能需要在各种不的环境中自主行动,并完成不同同的任务。
在面对复杂的环境时,自动驾驶车辆主要在道路交通环境中行驶,虽然道路环境复杂多变,但是相对受控,遵循一定的规则和标准。而智能机器人可能需要在各种复杂的环境中操作,如室内、户外、不同地形等。智能机器人需要具备更强的适应能力,能够应对各种复杂的环境情况。
自动驾驶和智能机器人在适应复杂的任务和环境方面存在一些区别,主要体现在任务复杂性、环境复杂性等方面。 智能机器人通常需要具备更高级别的感知、规划和控制能力 ,以适应更加复杂多变的任务和环境。
2、场景感知硬件布局:
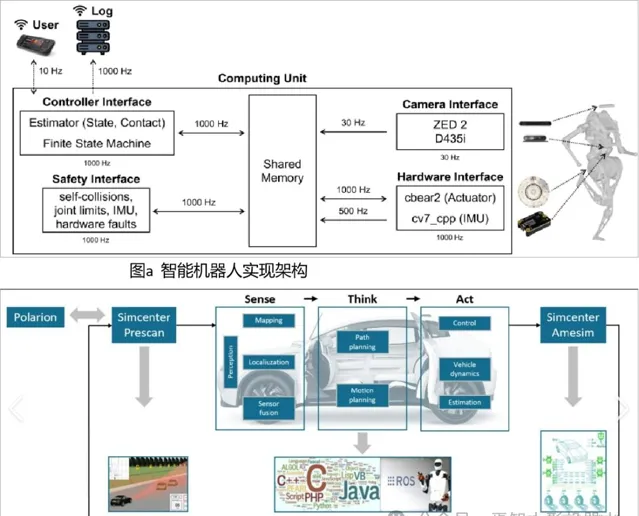
智能人形机器人需要能够感知周围的环境,包括障碍物、地形、其他人类等信息,以便做出合适的决策和行动。从传感角度来看,对周围环境的更大视野本质上是可能的,因为机器人存在更高的点(即头部)。 与其他可以自然安装摄像头的机器人平台相比,能够从高点灵活调整头部的位置和方向,这意味着更好的视野和对环境的更好理解,从而可能实现更好的规划算法和部署。
这要求系统能够有效地处理传感器数据,并从中提取有用的信息。 对于人形机器人而言,应用相对可靠的感知和导航技术是必要的方式。 人形机器人需要准确地感知周围环境,并能够进行定位和导航。这涉及到多种感知技术的集成,包括视觉传感器、激光雷达、超声波传感器等,以及定位和地图构建算法。
此外,在人形机器人中,较为广泛使用的传感器还涉力矩传感器(主要包括一维和六维)、位置传感器、触觉传感器、惯性传感器等。比如,目前特斯拉 Optimus 方案采用的梳理分别为 1 个视觉传感器、28 个一维力/力矩传感器、六维力传感器 4 个(手腕和脚踝)、42个编码器、10 个触觉传感器和 2 个惯性传感器。
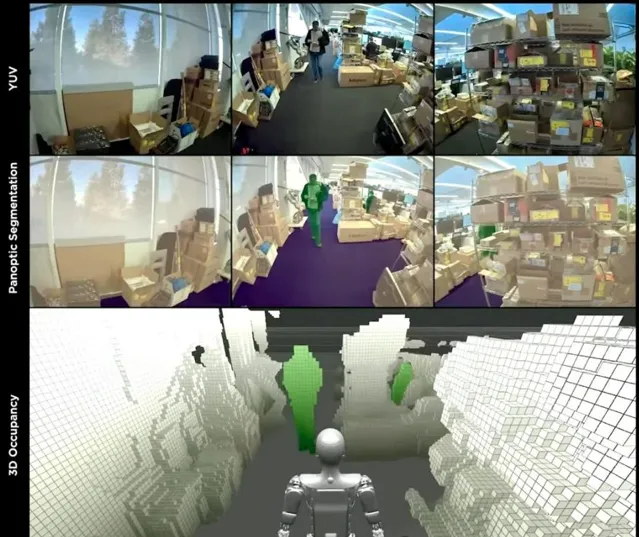
图3 机器人安装智驾摄像头的感知范围
此外,对于场景理解而言,智能人形机器人需要能够充分理解周围环境的场景和语境,包括理解不同物体之间的关系、预测物体的行为等。 这需要结合深度学习和自然语言处理技术,以实现更加智能和自然的交互。 对于场景理解上,自动驾驶则相对简单很多,甚至很多可以直接归于基于规则或可解释的场景理解表示形式对场景进行拆分和处理。
自动驾驶系统中应用的传感器模型和感知算法在一定程度上可以应用于智能机器人 ,但需要根据具体的应用场景和机器人的特性进行适当调整和优化。以下是一些需要考虑的因素:
传感器选择和布局: 自动驾驶系统通常使用激光雷达、摄像头、雷达、GPS等多种传感器进行环境感知。 在智能机器人中,可以根据具体需求选择合适的传感器,并考虑传感器的布局和参数设置,以实现对周围环境的有效感知,包括障碍物检测、定位导航、目标识别等。 不同的传感器具有不同的感知能力,如摄像头适用于图像识别,激光雷达适用于距离测量等。
传感器数据融合: 自动驾驶系统通常通过传感器数据融合算法将不同传感器的数据进行融合,以提高环境感知的准确性和可靠性。在智能机器人中,也可以 借鉴 这种方法,将多种传感器的数据进行融合,以获取更全面的环境信息。
环境建模和目标检测: 自动驾驶系统通常需要对周围环境进行建模,并检测识别各种目标物体,如车辆、行人、障碍物等。在智能机器人中,同样需要进行环境建模和目标检测,以实现对周围环境的理解和感知。这里需要说明的是, 智能机器人中的环境建模和目标检测相对于自动驾驶来说更加复杂和多样化,需要应对更高级别的挑战 ,包括环境复杂性、任务多样性、传感器数据融合、实时性要求和复杂目标检测等方面的难点。
3、高效的运动控制和规划
人形机器人和自动驾驶车辆在运动规划上有一些显著的区别, 相比之下,自动驾驶车辆的运动规划相对更为简单和直接。 自动驾驶车辆通常在预先规划好的道路网络上行驶,其运动规划主要涉及到路径规划和速度控制,以确保车辆安全、高效地行驶。自动驾驶车辆的运动规划更注重于遵守交通规则、避让障碍物和其他车辆,以及实现路径的平滑和高效。
人形机器人和自动驾驶车辆在运动规划上的区别主要体现在运动方式、姿态规划、交互性和实时性等方面 ,需要根据具体的应用场景和需求进行相应的规划和设计:
运动方式和环境适应性: 人形机器人通常在复杂多变的环境中移动,需要具备较强的灵活性和适应性,能够应对不同地形、障碍物和人群等情况。因此,人形机器人的运动规划需要考虑到人体的动力学特性和环境的复杂性,以确保机器人能够安全、自然地移动。
姿态和动作规划: 人形机器人不仅需要规划移动的路径, 还需要规划相应的姿态和动作,以实现稳定、流畅的移动。 这涉及到对人体动力学和运动学的深入理解,以及对姿态和动作规划算法的高效设计。
交互性和社交性: 人形机器人通常需要与人类进行交互和共处,因此其运动规划 还需要考虑到与人类的社交规范和行为习惯 。这包括避让行人、与人类保持适当的距离和方向等,以确保交互的自然和友好。
实时性和反应速度: 人形机器人在移动过程中需要实时地感知和响应周围环境的变化,因此其运动规划需要具备较高的实时性和反应速度,能够及时调整行动策略。
4、人机交互和语义理解
智能人形机器人需要能够与人类进行有效的交互,包括语音交互、面部表情识别、姿态识别等。这要求系统能够理解人类的语言和行为,从而提供个性化的服务和支持。
首先在人机交互交互方面 ,对自动驾驶车辆控制而言,车辆的人机交互相对简单,主要体现在车辆与驾驶员之间的信息传递和指令执行。自动驾驶车辆需要能够向驾驶员传递重要信息,如警告、提示等,同时能够根据驾驶员的指令进行相应的行动。
而对于智能机器人而言, 智能机器人需要与人类进行复杂的交互,包括语音对话、姿态识别、情感交流等。 智能机器人的人机交互更加细致和个性化,需要考虑到人类的情感和心理需求,以实现更加自然和愉快的交流体验。
其次 ,在环境语义识别方面 ,自动驾驶车辆的环境语义识别主要集中在道路和交通环境上,包括识别交通标志、信号灯、车辆和行人等。自动驾驶车辆需要能够准确理解这些环境信息,以实现安全、高效地行驶。
而智能机器人需要对周围环境进行语义理解,包括识别不同物体、理解场景和情境等。智能机器人的环境语义识别需要考虑到物体的种类、属性和功能,以及场景的意义和背景信息。
5、安全性和可靠性要求高
在对安全性和可靠性要求设计上,一般来说, 自动驾驶车辆的安全性和可靠性要求会更高一些 ,主要是针对潜在危险性、监管标准、应用场景几个方面。
首先 ,自动驾驶车辆在道路上行驶,其失控可能会导致严重的交通事故,对人身安全造成威胁。因此,自动驾驶车辆的安全性要求更高,需要在设计和实现上采取更多的安全措施。
其次 ,自动驾驶车辆受到严格的监管标准和法规要求,需要通过一系列的测试和认证来证明其安全性和可靠性。这些标准通常比智能机器人领域的标准更为严格。
最后 ,自动驾驶车辆通常在复杂的交通环境中运行,需要处理各种不确定性和动态变化。相比之下,智能机器人通常在相对受控的环境中运行,其安全性要求相对较低。因此,由于自动驾驶车辆的特殊应用场景和潜在危险性,其安全性和可靠性要求通常会更高一些,需要在设计和实现上投入更多的精力和资源来保证其安全性和可靠性。
智能人形机器人在与人类密切接触和共处过程中,其安全性和可靠性要求却非常高。因此,智能机器人系统也需要具备安全的机械设计、安全的运动控制算法,以及自我保护能力,确保在与人类交互过程中不会造成伤害。
总结
自动驾驶行业和智能机器人行业的转型在一定程度上是有必要的,特别是在当前自动驾驶行业发展疲软的情况下,转向智能机器人领域可能是一个有意义的选择。
智能机器人中的路径规划和运动控制与智能驾驶相比,更具有环境复杂性、任务多样性、交互性和精细度等方面的挑战,需要更加灵活和智能的算法和策略来应对各种复杂情况。
智能机器人通常需要在复杂多变的环境中进行路径规划和运动控制,包括室内、室外、不同地形等多种场景。而智能驾驶主要在道 路交通环境中进行路径规划和运动控制,虽然道路交通环境复杂,但相对受控。
智能机器人的任务多样化,可能涉及到避障、导航、物体搬运等多种任务,需要灵活的路径规划和运动控制策略。而智能驾驶的任务相对单一,主要是安全地驾驶到目的地,路径规划和运动控制相对固定。
智能机器人通常需要与人类进行交互,如避让行人、避障等,路径规划和运动控制需要考虑到人机交互的因素。智能驾驶主要与其他车辆和交通设施进行交互,需要遵守交通规则和安全驾驶。
智能机器人的路径规划和运动控制可能需要更高的精细度和灵活性,以应对复杂环境和任务需求。智能驾驶的路径规划和运动控制需要考虑到车辆的速度和安全性,需要更加稳定和可靠。
除了以上提到的一些技术差异带来的难度外,关键还在于深入市场分析、技术创新、产品多样化、成本控制、市场营销和人才团队建设等方面的努力,以应对行业转型带来的挑战,实现长期发展。











