以下内容来自 小六的机器人SLAM学习圈 知识星球 每日更新内容
Submitted to ICRA 2024|通过与视觉惯性里程计的紧密融合,实现了单轨地面车辆动力学模型的在线标定
【Online Calibration of a Single-Track Ground Vehicle Dynamics Model by Tight Fusion with Visual-Inertial Odometry】
文章链接: [2309.11148] Online Calibration of a Single-Track ...
作者单位:马克斯·普朗克智能系统研究所图宾根(德国)
demol链接: https://youtu.be/BuGY1L1FRa4
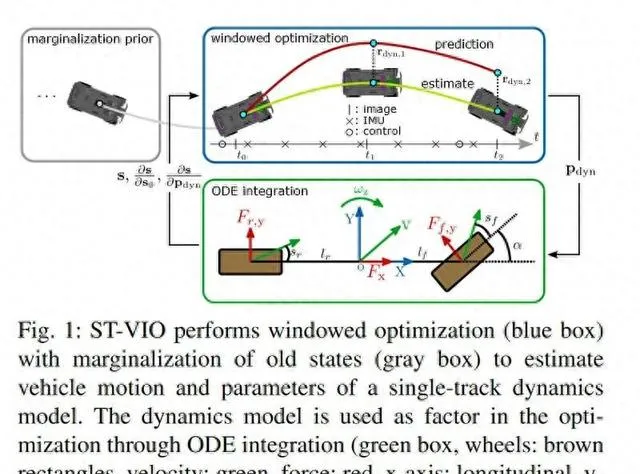
轮式移动机器人需要估计其运动和控制动作对导航规划的影响。在本文中,我们提出了一种新的方法ST - VIO,它将轮式地面车辆的单轨动力学模型与视觉惯性里程计紧密融合。我们的方法在线校准和调整动力学模型,并在未来控制输入的条件下促进准确的前向预测。单轨动力学模型使用常微分方程来近似平地上特定控制输入下的轮式车辆运动。
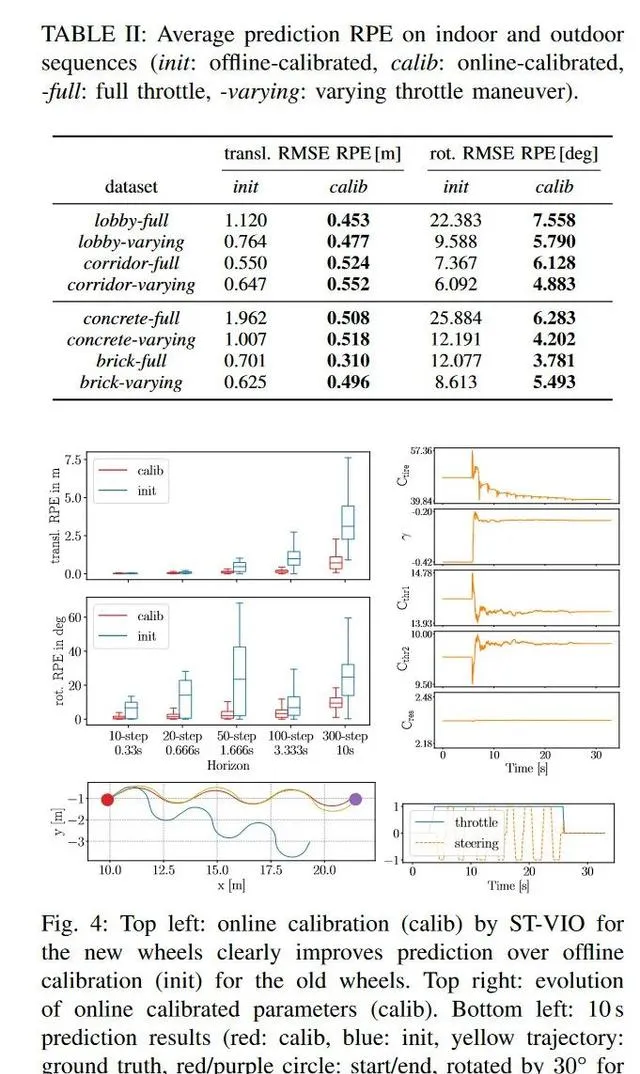
我们使用单轨模型的无奇异和可微变体,使其能够作为动力学因子无缝集成到VIO中,并与VIO状态变量一起在线优化模型参数。我们在具有不同地形类型和车轮的室内和室外环境中使用真实数据对我们的方法进行了验证。实验结果表明,ST- VIO不仅能够适应环境的变化,在新的控制输入下实现准确的预测,而且提高了跟踪精度。

以上内容来自小六的机器人SLAM学习圈 知识星球 每日更新内容
推荐阅读
如何快速上手基于NeRF的SLAM?
太强了!世界第一款开源的自动驾驶一体化框架Autoware!(附交流群)
【全网首个】3D Gaussian Splatting原理、应用场景及最新进展
【全网首个】详解深度学习特征提取匹配开源算法SuperPoint和SuperGlue











