本文内容来源于【测绘学报】2024年第6期(审图号GS京(2024)1198号)
遥感影像高可信智能不变检测技术框架与方法实践
宁晓刚 , , 张翰超 , , 张瑞倩
中国测绘科学研究院,北京 100036
基金项目
作者简介
摘要
针对传统变化检测技术面临的样本类别不平衡、算法适用性差和知识应用不足问题,本研究从逆向角度出发,提出了遥感影像高可信智能地类不变检测技术框架。该框架通过智能化算法准确提取各类任务均不感兴趣的稳定不变区域,从而在实际应用中压缩作业面积,提高生产效率。在数据预处理基础上,根据不变检测特点构建样本库,提出先验信息引导的全局-局部不变检测方法消除整体性和局部性「伪变化」,形成格网化不变掩膜,并从精度和效率角度提出压盖准度和压盖幅度两个对象级指标进行评价。在全国多个地区的实践表明,该框架能够在保证精度的同时大幅减少人工目视判读工作量,显著提升提取效率,为实际应用场景下的遥感变化信息提取提供了全新范式。
关键词
本文引用格式
宁晓刚, 张翰超, 张瑞倩. 遥感影像高可信智能不变检测技术框架与方法实践 [J]. 测绘学报, 2024, 53(6): 1098-1112 doi:10.11947/j.AGCS.2024.20230405
NING Xiaogang, ZHANG Hanchao, ZHANG Ruiqian.
阅读全文
http://xb.chinasmp.com/article/2024/1001-1595/1001-1595-2024-06-1098.shtml
自然资源地表覆盖变化信息是自然资源管理的重要基础性数据成果,在自然资源管理业务中发挥着不可替代的重要作用[1] 。在实际应用中,由于有着非常严格的成果管理要求,在自然资源调查监测业务中,为确保成果的准确性和可靠性,主要采用「人工目视解译+外业调绘」的作业模式。以2016、2017、2018年全国基础性地理国情监测项目为例,每年的图斑数分别为2.65亿、2.68亿、2.73亿,同期的全国土地利用变更遥感监测项目的图斑数为127万~130万,数量非常庞大。由于需要人工提取大量的变化图斑,上述作业模式的弊端凸显:投入大、耗时长、效率慢、时效性较低,受主观因素影响大[2] 。若从全国范围、其他行业领域来看,遥感数据越来越多,分辨率越来越高,需求越来越细,应用量越来越大,技术水平提升迫在眉睫[3-4] 。地表覆盖变化信息提取作为政府实现自然资源科学管理的重要工作,传统的作业模式已经很难满足新时代国家治理体系和治理能力现代化的需求[5-7] ,因此,研发智能化算法模型,实现信息自动化处理赋能生产已成为一项重要课题[8] 。
人工目视解译提取变化图斑主要分为变化发现、图斑勾绘和属性赋值3个环节,理想情况下利用语义变化检测算法能够实现全部替代。然而,由于变化检测算法提取的图斑边界尚无法满足高标准成果规范要求,大多数情况仍需人工修改或重新勾绘,另外当前语义变化检测的语义类别精度偏低,仍需要全面的属性检查和修改。因此,当前变化检测算法在图斑勾绘和属性赋值环节尚无法替代人工,赋能生产的主要应用在于提升变化发现环节的作业效率。根据自然资源部公布的2022年、2023年中国自然资源公报数据统计,年度土地资源(含耕地、园地、林地、草地、湿地、城镇村及工矿用地、交通运输用地、水域及水利设施用地)的变化面积只占总面积的0.104 8‰,可见在实际自然资源高频率的监测应用中,99.9%以上的区域都是未发生变化的区域。若能精准提取50%的未变化区域,便可直接提升1倍的变化发现效率。因此,研究如何精确提取未变化区域,压缩变化发现环节的作业面积,对于提升人工生产效率极为关键。
1961年,Rosefeld首次用数字化的侦察遥感图像开展自动变化检测研究[9] 。此后,利用遥感影像进行变化检测逐渐成为研究热点。变化检测是通过对同一目标或现象不同时间的观测来确定其变化的处理过程[10] 。遥感变化检测研究的目的是找出感兴趣的变化信息,滤除作为干扰因素的不相干的变化信息[11] 。从20世纪80年代起,大量的变化检测方法和模型开始涌现,不少专家学者进行了探索研究和总结归纳[12-16] ,变化检测方法大体可分为像素比较法[17] 、面向对象法[18] 、机器学习法[19] 、深度学习法[20] 及混合类方法等。
像素比较法是以像素为基本单元,逐像素比较两幅影像的不同,从而揭示变化信息。像素比较法包括差值法[21] 、比值法[22] 、回归分析法[23] 、图像变换法[24] 和分类后比较法[25] 等。这些方法具备操作简单、处理速度快的特点,但无法准确确定变化的类型和性质。为克服基于像素的方法中出现的「同物异谱、同谱异物」问题,面向对象的变化检测方法引起了广泛关注。该类方法以对象为最小单元进行分析,首先通过面向对象的影像分割技术得到同质性对象,然后再进行变化检测。面向对象的变化检测主要包括直接对象比较法和对象类别比较法。直接对象比较法又包括马尔科夫随机场[26] 、条件随机场[27] 等方法,对象类别比较法是指对象级分类后比较法[28] 。机器学习法相比于人工设计的算法模型具有自动化程度高、适应性强等方面的优势,能够显著提升变化检测性能,主要包括决策树[29] 、随机森林[30] 、支持向量机[31] 和极限学习机[32] 等。这些方法主要通过影像预处理、影像特征提取、特征表达和分类器训练等步骤来实现变化信息提取。相比于直接像素比较法,这类方法加入了GIS信息[33] 辅助遥感影像的分类,提升了变化检测的精度和效率。随着大数据和人工智能时代的到来,深度学习为变化检测的发展注入了新活力。通过数据驱动的手段,深度学习方法可以有效挖掘数据特征,避免了人工特征设计与提取带来的效率低等问题,这为遥感影像变化检测提供了一条途径。众多学者将深度学习方法运用到变化检测中,代表网络有卷积神经网络[34] 、深度置信网络[35] 、自编码网络[36] 、生成对抗网络[37] 、Transformer[38] 、遥感大模型等。
然而,现有深度学习变化检测方法研究与应用面临着3大难题:①变化样本数量远小于不变样本数量导致的样本类别不平衡难题;②传感器成像、地物状态变迁、应用场景需求多变等引起的算法泛化难题;③业务化场景知识的利用不足导致的变化图斑类别不清及边界不准难题。随着卫星遥感技术的不断发展,数据源将愈加丰富,观测频率将越来越高,应用场景将更加复杂多变,上述3类难题也将愈加突出。
从1961年至今,遥感影像变化检测一直是遥感领域的研究热点,近年来出现了很多方法,取得了长足进展。但利用遥感影像进行自然资源地表覆盖变化检测是一个极为复杂的问题。专家一致认为[13-14] ,目前没有一种普遍适用的方法来解决该问题,也缺乏适用于自然资源调查监测实用化场景的自动识别和变化检测技术。其内在原因如下。
(1)遥感影像是地物在入射条件下的光谱反映,「同物异谱,同谱异物」现象普遍存在[39] 。因此,准确识别地物天然存在难题。
(2)遥感影像类型多样、成像条件各异,各类遥感影像的传感器、光谱区间、分辨率、入射角、季节、光照条件均不尽相同[40] 。同时,各种主客观条件引起信息缺失,如遮蔽阴影、云雪覆盖、影像处理失当等[41] 。此外,地物状态变迁引起「伪变化」,如林地、草地随季节变化、结冰与消融、人造地表涂色更改等[42] 。
(3)地物变化客观性与应用需求主观性矛盾。地物状态存在客观性,而在实际应用中只提取关心的变化,即该变化为自定义的「变化」[43] ,由此造成部分客观变化被忽略,部分微小变化被人为放大,使得统一的提取算法从根本上难以适应复杂多变的实际需求。
面向数据类型多、监测范围广、下垫面情况千变万化的自然资源调查监测实际应用场景,自动识别和变化检测技术无法全部满足实际应用要求。区别于传统变化检测的一步式需求解决方案,本文提出不变检测的技术框架和方法,将变化信息提取需求分解为机器不变检测和人工变化提取两个步骤,即算法负责处理简单稳定的不变区域检测识别任务,人工负责处理复杂多变的变化目标提取任务,从而形成新的变化检测范式,为实用化变化信息提取提供新途径,以期弥补变化检测算法进展与实际应用需求之间的差距。
1 不变检测的概念和内涵
不变检测从影像基本不变区域、因成像原因和地物状态等造成的有一定规律的「伪变化」区域入手进行检测,为地表覆盖信息更新问题打开一扇新门,提供一个全新视角。
1.1 「变」与「不变」的剖析
遥感影像变化检测是确定和分析目标区域的地物变化,广义的地物变化类型主要包括地物类别、位置、范围、形状、状态等。地物类别的变化指同一空间位置不同时相地物类型上的差异;地物位置的变化指不同时相的同一地物在空间位置上的差异;地物范围的变化指地物所占空间或面积的扩张和缩小;地物形状的变化指同一地物的外形在不同时间发生的变化;地物状态的变化指地物随着时间的推移而呈现出不同的形态。地物类别变化是最根本的变化,位置、范围、形状变化会连带造成类别变化。状态变化形式复杂多样,在遥感变化检测应用中通常不认为其属于变化检测范畴。
变是绝对的,不变是相对的。地表要素种类繁多,加之不同的变化检测任务对变化的定义不同,导致地表要素「变」与「不变」的定义和概念不尽相同。遥感影像上「变化」的来源可分为成像条件不同引起的变化,阴影、遮挡、处理失真等引起的变化,地物状态和类别变化3大类。在实际应用中,前两类影像变化基本不被关注,一般认定为不变;地物类别变化更受关注,尤其是某些特定类型的地物类别变化(如新增建设用地、耕地非农化建设等),因此地物类别变化需要根据实际应用需求来确定是否属于感兴趣变化。变化检测方法试图通过用一个统一的阈值来实现「变」与「不变」的准确划分,但由于变化情况的复杂性使得感兴趣的变化内容与其他变化类型相互交织,实际中常陷入查准与查全难以兼顾的局面。
为便于厘清其中关系,将本文所梳理的「变」与「不变」的关系用图、集合的数学语言来进行描述。 图1(a) 中,变化集合为 C ,不变集合为 B ,变化与不变的理论分割线为 L ,全集为 U ,即 U = C ∪ B 。感兴趣变化集合为 G , G ⊆ C ;不变检测中关心的稳定不变为 W , W ⊂ B 。 G 1 , G 2 ,…, Gn 是一系列不同变化检测任务感兴趣变化的集合, G 是其并集, G ={ G 1 ∪ G 2 ∪…∪ Gn }。一般而言,每项具体任务感兴趣变化的边界是明确的,即 G 1 , G 2 ,…, Gn 中各自具有明确的边界,但由于任务个数 n 的不确定性, G 是一个变化的集合。
图1
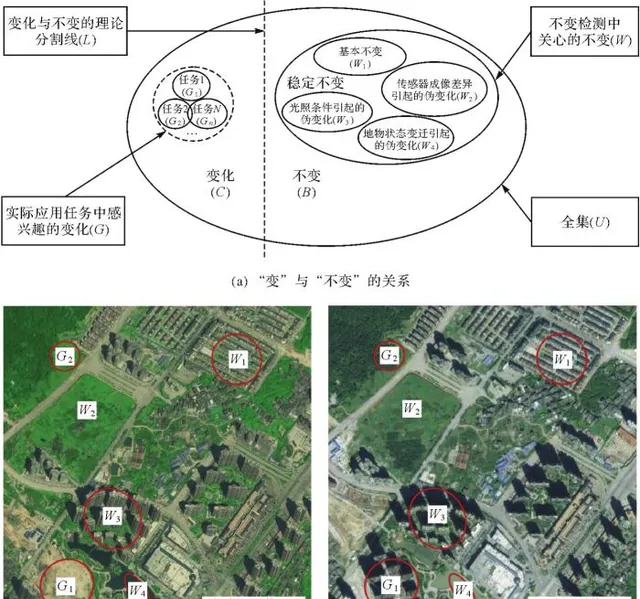
图1 「变」与「不变」的关系与示例
Fig.1 The relationship and examples of 「change」 and 「unchange」
从科学视角来看,理论上存在变化与不变的分割线 L ,可通过辐射、结构等各种客观角度进行科学的设计和论证来形成合理的划分方案,由于涉及因素过多等原因,目前并未形成客观可行的划分标准。
从应用视角来看,每项具体任务的感兴趣变化的边界一般是明确的,即用户想要提取的变化类型一般都有明确的划分标准,但该标准多从需求角度定义,存在一定的主观性。
从变化检测研究现状来看,在理论探讨中,通常将「变」与「不变」当作一对概念来进行讨论,对应 图1 中的 C 和 B 。然而,在算法研究中,由于需要得到明确的精度评价数值,其变化的定义服从测试数据的「真值」,而其测试数据的「真值」则多由应用视角的划分标准得到,也就是将变化检测任务具体化。如在提取新增建设用地任务( G 1 )中,会将耕地变为林地视为不变;在耕地非粮化监测任务( G 2 )中,则又将耕地变为林地视为变化。 表1 列举了当前研究中常用的变化检测数据集,从中可以看出不同的数据集对变化类型的定义差别较大,对应图中 Gn 。
表1 变化检测数据集对比
Tab.1 Change detection dataset comparison
| 数据集 | 分辨率/m | 变化类型 | 数据来源 | 分布地区 |
|---|---|---|---|---|
| SZTAKI[44] | 1.5 | 新建城区、建筑作业、大批树木种植、耕地变化等 | 航空数据+谷歌地球 | 匈牙利佩斯州绍道 |
| ABCD[45] | 0.4 | 建筑物是否被冲走 | 航空数据 | 日本东北地区 |
| WHU building CDD[46] | 0.075 | 只关注建筑物变化 | 航空数据 | 克赖斯特彻奇 |
| GZCD[47] | 0.55 | 只标记建筑物变化 | 谷歌地球 | 广州 |
| Lebedev-CD[48] | 0.03~1 | 考虑不同大小对象变化(建筑物、道路、森林、汽车、树木、坦克等) | 谷歌地球 | — |
| LEVIR-CD[49] | 0.5 | 只关注建筑相关变化 | 谷歌地球 | 美国得克萨斯州 |
| DSIFN-CD[50] | 2 | 关注土地覆盖对象变化(道路、建筑物、农田、水体等地物) | 谷歌地球 | 北京、成都、深圳、重庆、武汉、西安 |
| SYSU-CD[51] | 0.5 | 新建城市建筑、郊区扩张、施工前的基础工作、植被变化、道路扩建、海上建设等 | 航空数据 | 香港 |
| LIM-CD[52] | 0.5~2 | 新增建设用地变化(如住宅建筑,工业、商业建设,公共、交通设施建设),特殊用途建筑(水利、园林、绿化等) | 镶嵌影像(15颗卫星) | 中国10个地形各异的省区市 |
新窗口打开| 下载CSV
正是由于感兴趣变化的不确定性,不变检测思路从逆向角度出发,目的是找到各类变化检测任务均不感兴趣的类型,称为「稳定不变」,对应 图1 中 W ,主要包含基本不变( W 1 )和传感器成像差异引起的伪变化( W 2 )、光照条件引起的伪变化( W 3 )、地物状态变迁引起的伪变化( W 4 )。通过对「稳定不变」类型的精准检测,排除不感兴趣的不变区域,从而在各类实际应用中压缩作业面积。
由 W 和 G 的含义可知, W 是客观的,存在一定的规律性,如同一传感器拍摄的影像在色彩和风格上具有一定的相似性。 G 随人类感兴趣目标而变化,具有一定主观性和随意性,如在耕地非农化、非粮化监测中,前期影像均为耕地,后期分别为灌溉后的水田和坑塘,两者在影像上均表现为「水面」特征,而前者不认为是变化,后者却被认为是变化。另外,由于 G 包含变化的整体范围是变化的,难以形成通用的检测算法,而 W 的类型组成更加明确,可以形成通用的检测算法。因此,研究如何识别稳定不变区域比直接识别变化更加简单,相对于现有变化检测研究中主要关注算法对「真值」 G 的提取,稳定不变 W 的提取算法在落地应用方面有优势,本文提出不变检测思路使研究对象从 G 转变为 W 。
1.2 不变检测的概念
不变检测是指提取各类变化检测任务均不感兴趣的稳定不变区域的过程。稳定不变区域主要包含基本不变和由传感器成像差异、光照条件、地物状态变迁引起的伪变化区域。
目前针对地表覆盖不变检测的研究还很少。有学者应用迭代加权多元变化检测算法提取未发生变化的像元作为特征像元用于变化检测[53] ,也有学者通过利用不同时相SAR影像的不变信息具有的相关性进行联合分类变化检测,减小分类累积误差[54] 。这些研究虽然涉及影像不变信息的运用,但并未将地表覆盖不变检测作为专门课题进行深入研究。
1.3 不变检测的内涵
不变检测可实现对传统变化检测理论的简化,把变化检测面临的难题转化为可解决或可规避的问题。第一,不变检测将变化检测「从影像变化推导地物变化」这一无法完全确定的难题简化为「从影像不变推导地物不变」的可求解问题。在变化检测中由成像条件差异等造成的大量伪变化问题,在不变检测中将得以规避,且检测精度更容易保证。第二,不变检测的思路能够很好地以「不变」规避地物实际变化与人类需求变化之间的逻辑混乱关系,只需找到前后时相影像的不变区域,此时地物不变的客观性和任意应用对不变的定义是总体一致的。第三,不变检测以减少人工目视解译范围为目的,在保证不变检测在一定查准率水平的前提下,压缩变化或可能变化区域的范围,从根本上规避变化检测对边界精度的严苛要求。不变检测的思路和概念示意图如 图2 所示。
图2
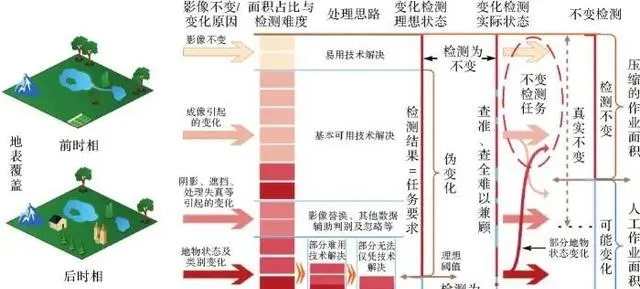
图2 不变检测的思路和概念示意图
Fig.2 Ideas and concept maps of changeless detection
结合 图1(b) 中的示例区域, 图2 中的成像引起的变化是整体性的( W 2 ),这部分主要由于传感器差异引起,具备系统性的规律,可以通过技术手段进行消除;去除这类伪变化后,大部分区域为影像不变( W 1 )区域,这类区域两期影像的色彩、纹理基本上未发生变化,最易提取;另外,部分由于光照或拍摄角度变化引起阴影、遮挡等属于信息缺失,可以用影像替换、其他数据辅助判别等手段来进行解决;最为复杂的是地物状态和类别变化,通常在自然资源地表覆盖监测任务中,地物类别变化才认为是感兴趣变化,而地物状态变化则认为是不变,如 图1(b) 中 G 1 区域新建了高层建筑, G 2 区域由耕地变为了林地,实际应用中的感兴趣变化与任务需求高度相关,在耕地非农化、非粮化监测中,需要提取 G 2 区域,不需要提取 G 1 区域,而新增建设用地监测则相反。而 W 4 区域只是水体的状态发生了变化,实际地类并未变化,因此归类为地物状态引起的伪变化,这类区域通常与具体地物类型密切相关,具备局部性特征,可通过地物识别分类技术解决。
2 不变检测的技术框架
针对遥感影像变化检测面临的难题,基于变化区域面积远小于不变区域面积这一假设前提,本文提出不变检测理论与方法以实现对传统变化检测理论的延伸与发展,把变化检测面临的3大难题转化为可解决或可规避的问题:①利用直推式影像回归学习模型消除传感器成像、地物状态变迁等引起的影像上的「伪变化」,提取影像不变区域,此方法将变化检测中「变化位置发现」步骤转化为影像回归,由于回归模型训练和预测皆为同一影像对,因此能够突破传统学习模型泛化能力的桎梏,解决算法适用性难题;②利用影像分类/目标识别方法对不变区域外的可能变化区域识别筛选,在保证准确性的前提下进一步消除不感兴趣的变化,缩小疑似变化区域范围,此方法将变化检测中「变化类别确定」步骤转化为目标区域识别分类问题,从而既降低了识别分类的难度又避免了变化检测算法面临的样本类别不平衡问题;③从检测区域本地数据中提取地类不变信息及先验知识,将疑似变化区域内部的复杂变化类型识别和边界提取由人工根据应用需求来完成,从而避免变化图斑语义化边界提取难题。由于3大难题的存在,当前变化检测提取成果在位置精度、边界规范性和属性精度方面均难以满足生产需要。采用不变检测-变化信息提取新范式,将自动不变检测与人工目视解译相结合,能够有效解决或规避变化检测面临的难题,实现技术的落地应用。算法研究中,也可将不变检测作为变化检测的前置步骤,形成「不变检测-变化检测」的多阶段检测方案,用于提升变化检测的最终效果,如多阶段渐进式变化检测方法[55] 。
2.1 技术流程与方法
不变检测技术流程可分为数据预处理、不变检测样本库构建、不变检测技术方法、成果输出与评价4个步骤,如 图3 所示。
图3
图3 不变检测技术流程框架
Fig.3 Technology process framework of changeless detection
2.2 数据预处理
数据预处理涵盖多个步骤,如影像几何纠正、配准、融合、镶嵌、匀色、裁切等,这些步骤的主要目标是将遥感影像对在几何位置、色彩特性和空间范围方面进行标准化和优化,从而为后续的不变检测任务创造有利的条件[56] 。影像正射纠正通过消除几何失真,确保影像像素在地面上的精确位置,以保证变化检测的精度和可靠性。配准操作则旨在将两期影像对准,以便进行一致性比较。影像融合和镶嵌则将多个来源影像融合成一个无缝的整体,以维持数据的连续性和一致性。匀色操作可以减少由于不同影像来源和光照条件引起的色彩差异,使得影像在色彩上更加一致。裁切步骤将影像调整到相同的空间范围,确保后续处理过程的一致性。
2.3 不变检测样本库构建
在基于深度学习开展遥感影像变化检测任务时,样本库的质量直接影响模型的性能和稳健性,因此构建一个高质量的样本库至关重要[57] 。现有的遥感影像变化检测公开数据集主要包括前时相影像、后时相影像、变化类型标签3类文件。数据集涉及地区范围相对较小,影像类型较为单一,主要构成为存在变化的样本。相比而言,不变检测样本库应具有以下特点:①为区分伪变化类型,增加了各类伪变化类型属性;②为体现地域特征,增加了影像地区属性;③为体现影像成像特征,增加了影像数据源属性;④为体现各变化/伪变化类型数量分布情况,不以是否存在变化对样本进行人为筛选。不变检测样本采集和样本库构建应在整理各类样本备选源的基础上,围绕「伪变化」形成原因这一重点,考虑地形地域特色、传感器特点、时相季相差异、尺度差别等对样本进行分类划分,构建具有层次性、区域性、时序性、尺度性、多样性的地表覆盖分类变化样本。设计具有全面性、代表性、均衡性、时序性、尺度性的地表覆盖要素样本库构建方案。
2.4 不变检测技术方法
不变检测技术方法的核心在于基于不变区域面积远大于变化区域面积这一前提条件,将传统变化检测的重点从寻找感兴趣变化区域转移到识别和分析稳定不变区域。根据 图1 中稳定不变区域的主要构成,重点采用针对性算法实现整体性和局部性伪变化的去除。整体性伪变化主要包括由于传感器成像差异( W 2 )引起的整体性影像变化,局部性伪变化包括地物状态变迁引起的伪变化( W 4 ),另外光照条件变化( W 3 )中光照强度差异引起的是整体性伪变化,而光照角度差异引起的是局部性伪变化,在算法中分别进行处理。在传统深度学习变化检测方法中,这些伪变化常被统一视为不变的区域,并未针对它们进行明确的区分。因此,对于不同类型的伪变化的识别准确度主要受制于数据集内伪变化类型的分布以及所采用的网络模型,容易造成对各类伪变化识别的适用性较差的问题。不变检测则对不同的伪变化类型进行分别处理,具体方法可以有多种,本文提出一种先验信息引导的全局-局部不变检测方法,该方法首先利用直推式影像回归学习模型消除传感器成像等整体性「伪变化」(对应 图1(b) 中的 W 2 ),继而提取绝大多数基本不变区域(对应 图1(b) 中的 W 1 ),然后利用先验信息驱动的特征聚合异常分析方法消除部分地物状态变化等局部性「伪变化」(对应 图1(b) 中的 W 4 ),最终得到不变检测结果。具体技术路线如 图4 。
图4
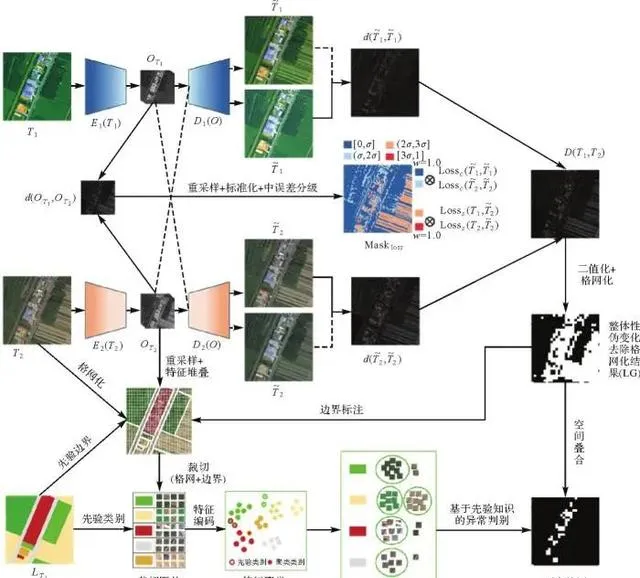
图4 先验信息引导的全局-局部不变检测方法
Fig.4 Global-local changeless information detection method based on prior knowledge
整体性伪变化去除首先利用编码器将 T 1 和 T 2 映射至编码空间 O ,然后再通过解码器进行分别解码得到各自回归后的结果,并利用解码器将 T 1 和 T 2 进行重构,构建顾及影像局部差异的联合损失函数,通过重构损失、回归损失和结构一致性损失的联合训练,约束卷积自编码网络实现特征对齐、整体性回归,同时避免局部变化区域的误生成。训练完成后计算回归后影像间的差异,累加得到 T 1 和 T 2 的最终差异图,并进行二值化和格网化得到整体性伪变化去除结果LG。整体过程的数学表达如下。
前后两期遥感影像分别为 T 1 和 T 2 ,则两者间分别回归的数学表达为
 (1)
(1)
 (2)
(2)
通过卷积自编码网络拟合
F
(
T
1
)和
H
(
T
2
),
F
(
T
1
)对应的编码器
E
1
(
T
1
):
,解码器
 :
:
 ,
H
(
T
2
)对应的编码器
E
2
(
T
2
):
,
H
(
T
2
)对应的编码器
E
2
(
T
2
):
 ,解码器
,解码器
 。同时重构
T
1
和
T
2
,
。同时重构
T
1
和
T
2
,
 :
:
 ,
,
 :
:
 。
。
顾及影像局部差异的联合损失函数包括重构损失Loss R 、回归损失Loss C 、结构一致性损失Loss S 。损失计算时需根据编码空间 O 中的影像差异进行条件权重计算。具体如下
 (3)
(3)
 (4)
(4)
 (5)
(5)
 (6)
(6)
 (7)
(7)
 (8)
(8)
 (9)
(9)
 (10)
(10)
式中, T 、 P 分别代表原影像和映射影像; C 、 M 、 N 分别为影像的通道数、行数和列数; m 、 n 代表像素在影像中的行列位置;Loss r 用于计算重构损失;Loss c 用于计算回归损失;Loss s 用于计算结构一致性损失; wc 和 ws 为不同Maskloss 值处对应的权重,对应{[0, σ ),[ σ ,2 σ ),[2 σ ,3 σ ),3 σ ,1}, wc =[1.0,0.5,0.25,0], ws =[0.25,0.5,1.0,0]; Fim 和 Fjn 是影像在 i 和 j 通道的 m 和 n 位置的值;式(8)、式(9)中 G 为格拉姆矩阵;SSIM为结构相似性指数[58] ; W 为影像块的个数; w 为影像块的序号,此处取16×16的影像块,用于分块计算SSIM。
两期影像间差异 Δ 可通过式(11)计算得到
式中, d 为差异性度量函数; I 1 和 I 2 分别代表两期影像。为简化计算,这里选择对应像素间曼哈顿距离绝对值,多通道向量计算时通道间取均值。特殊地, T 1 和 T 2 之间的差异 D ( T 1 , T 2 )= + 。
局部性伪变化去除首先将 T 2 影像通过预训练的编码器 E 2 进行特征提取,得到编码空间 O 的特征图 ,旨在捕捉影像的深层次特征,然后将 重采样至 T 2 影像大小,并进行堆叠,将深层特征与影像表层特征相结合。之后对堆叠后的影像进行格网化,以产生大小一致的图斑。同时, T 1 影像分类结果 的边界和类别信息和整体性伪变化去除格网化结果LG叠加到每个图斑上,以提供先验边界和类别信息。对于每个裁切的图斑 C ,对其特征进行编码,并利用AP(affinity propagation)聚类算法对这些特征进行聚类分析。将AP聚类结果与先验类别进行比较,识别并标记分类不一致的图斑。同时,标记单个聚类簇过小的图斑为异常图斑。根据基于不变区域面积远大于变化区域面积这一假设条件,将聚类结果与先验类别一致的和聚类后类别数量很大的图斑进行删除,得到局部伪变化去除格网化结果。
2.5 成果输出与评价
成果输出与评价步骤主要是为方便作业,可对可能变化区域范围适当扩大及规则化,并形成不变区域覆盖掩膜,为后续人工目视解译提供便利的产品服务。成果评价主要是从用户角度对不变检测成果的精度、不变掩膜覆盖率等进行评价,最后将不变检测成果输出并应用于具体实践。
变化检测结果的精度评价方法和指标有多种,较为常用的有混淆矩阵[59] 、ROC曲线[60] 、交并比[61] 等。混淆矩阵作为一种精度评价方法广泛应用于遥感领域信息提取和分类结果的精度检验,总体分类精度、错分误差、漏分误差和Kappa系数等指标均可以通过混淆矩阵来进行计算[15] 。
不变检测的成果呈现方式与传统的变化检测存在差异,其输出结果采用格网形式呈现。格网大小基于人工目视判定的最小单元设定,从而将图像划分为一系列相对小的区域。不变格网覆盖的区域被视为不需要进一步人工变化检测作业的区域,本文从用户角度提出压盖准度、压盖幅度两个对象级指标作为不变区域检测成果评价指标。压盖准度代表不变格网提取的精度,压盖幅度代表不变格网的占比,两者协同作用,为不变检测的成果质量提供了客观而有效的评价方法。
2.5.1 压盖准度
压盖准度(compression accuracy,CA)是反映不变检测准确性效果评价的基础指标,以图斑对象为单元进行评价。压盖准度为不变区域掩膜外的真实变化图斑个数与所有真实变化图斑个数之比。计算公式如下
式中,CN为位于不变区域掩膜外的变化图斑个数;SN为变化图斑总个数,部分遮盖按是否满足最小上图面积计数,最小上图面积由变化检测任务需求决定。
2.5.2 压盖幅度
压盖幅度(compression range,CR)是反映不变检测成果对作业效率提升效果评价的基础指标,压盖幅度为不变区域掩膜面积与整体作业区域面积之比。相关计算公式如下
式中,BA为不变区域掩膜面积;DA为整体作业区域面积。
另外,不变检测成果对作业效率提升效果也可用压缩率来评价。压缩率为不变区域掩膜外的可能变化区域面积与整体作业区域面积之比。对于同一地区,在压盖准度相同的情况下,压缩率越低,表明可能变化区域面积越小,检测结果越精确,对应的变化检测正确率越高。
3 应用实践
在上述遥感影像高可信智能地类不变检测技术框架的指导下,开发了遥感影像高可信智能地类不变检测系统(ACID),并在全国国土利用变更遥感监测、自然资源督察与执法、耕地非农化监测、全国产业园监测等多项国家重大工程及省区市遥感监测生产中应用。利用2020年度全国国土利用遥感监测生产项目图斑成果,综合考虑省级行政单元、地区、地形、气候、发展状况等因素,在全国选取500个典型区县进行了测试,平均压盖准度为97.79%,压盖幅度为47.84%。经多名生产人员独立实测,相比于全人工作业,50%压盖幅度下变化发现环节耗时减少47.36%。证实了本文技术框架与方法在保证精度的同时,能够大幅减少人工目视变化发现工作量,显著提升作业效率,在实际应用中取得良好效果。
3.1 不变检测样本库构建
以空间数据库为载体,规定针对典型要素提取、地表覆盖分类的样本库格式规范,规定样本库构建的遥感影像要求、历史解译数据要求、样本存储要求等,并记录样本基本信息,影像基本信息,样本类别、「伪变化」原因类别、空间关系、各类特征、可信度、地理位置等,形成满足深度学习需求的不变检测样本库,如 图5 所示。
图5
图5 样本库表结构
Fig.5 Structure of sample library tables
基于多个年度的全国国土利用变更调查遥感监测成果,构建了一个包含107 168组样本的不变检测样本库。每组样本包括前时相影像、后时相影像、像素级标签及样本属性等信息。样本的空间范围为1024 m×1024 m,涉及11个省区市的26个区县,包括东北、华北、内蒙古草原、黄土高原、西北、四川盆地、江南丘陵、长江中下游平原、华南、云贵高原、青藏高原等多样的地形地貌区域。
样本库使用了十余种遥感数据源,并拥有不同的分辨率,其空间分辨率包括0.5、1、2和5 m。样本属性基于影像表现特征进行分类,并进一步细分为5大类:①影像不变;②是否存在成像引起的变化;③是否存在阴影、遮挡、数据失真等现象;④是否存在地物状态变化;⑤是否存在地物类别变化。该样本库能够支持不变检测任务的训练、验证和测试,可为相关研究和应用领域提供有力的数据支持。
3.2 不变检测技术方法
整体性伪变化去除。基于已构建的包括各类伪变化类型的不变检测样本库,本文设计了专门针对不同伪变化类型的网络模型,采用基于直推式影像回归模型的方法,通过建立前后时相影像之间的回归关系,可以较好地消除整体性伪变化。以河南和陕西各10个区县进行验证,随着压缩率的变化,压盖准度与压缩率的关系如 图6 所示。由 图6 可知,前10%的格网包含约80%的变化;前30%的格网包含约95%的变化;前50%的格网包含约97%的变化。
图6
图6 压盖准度与压缩率的关系
Fig.6 Relationship between compression accuracy and compression range
为进一步验证算法的适用性,基于2020年度全国国土变更调查遥感监测项目中新增建/构筑物提取成果,综合考虑省级行政单元、地区、地形、气候、发展状况等因素,在全国选取500个典型区县进行了测试。各省区市结果如 图7 所示,平均压盖准度为97.79%,压盖幅度为47.84%。试验结果表明,该技术能够在保证极高的压盖准度的前提下,有效地消除遥感影像变化检测中的整体性伪变化,且具有广泛的适用性。
图7
图7 全国整体性伪变化去除测试结果
Fig.7 National holistic pseudo-change removal test results
局部性伪变化去除。在整体性伪变化去除结果的基础上,利用全国不同地区的15个区县的数据进行了局部性伪变化去除算法测试,在未利用样本库数据进行训练的情况下,平均压盖准度为91.90%,平均压盖幅度为86.81%,具体结果如 表2 所示。试验结果表明,该技术能够在无外部样本库监督的情况下,通过自动提取已有参考数据中的信息,突破训练数据带来的适用性限制,有效消除遥感影像变化检测中的局部性伪变化,极大提升压盖幅度。
表2 15个区县局部性伪变化去除算法结果
Tab.2 Results of the local pseudo-change removal algorithm for 15 districts and counties
| 行政区名称 | 真实变化图斑个数 | 不变区域掩膜外的变化图斑个数 | 压盖准度/(%) | 压盖幅度/(%) |
|---|---|---|---|---|
| 北京市门头沟区 | 65 | 61 | 93.85 | 93.54 |
| 河北省石家庄市深泽县 | 65 | 61 | 93.85 | 85.41 |
| 山西省临汾市侯马市 | 33 | 31 | 93.94 | 73.82 |
| 内蒙古锡林郭勒盟正镶白旗 | 98 | 93 | 94.90 | 97.75 |
| 吉林省白山市浑江区 | 85 | 72 | 84.71 | 94.55 |
| 江苏省扬州市高邮市 | 185 | 165 | 89.19 | 93.44 |
| 浙江省杭州市桐庐县 | 153 | 141 | 92.16 | 92.31 |
| 浙江省宁波市象山县 | 268 | 223 | 83.21 | 89.25 |
| 安徽省合肥市蜀山区 | 260 | 238 | 91.54 | 77.60 |
| 安徽省六安市金安区 | 266 | 235 | 88.35 | 93.53 |
| 福建省泉州市泉港区 | 50 | 48 | 96.00 | 70.59 |
| 河南省新乡市获嘉县 | 76 | 72 | 94.74 | 83.91 |
| 湖南省长沙市雨花区 | 78 | 75 | 96.15 | 88.90 |
| 湖南省株洲市天元区 | 69 | 69 | 100.00 | 80.24 |
| 湖南省湘西土家族苗族自治州花垣县 | 107 | 92 | 85.98 | 87.34 |
| 平均 |
|
|
91.90 | 86.81 |
新窗口打开| 下载CSV
3.3 成果输出与应用
采用格网化的形式,将作业区进行划分,并根据压盖准度和压盖幅度等评价指标,对不变检测的成果进行了全面分析。 图8 直观地呈现了不变区域和可能存在变化区域,其中不变区域为不变检测生成的格网化掩膜,该区域无须人工进行目视解译,未被覆盖的区域则需要人工识别和提取变化区域。利用不变检测技术,在压盖幅度50%的水平下,压盖准度超过97%,不变掩膜成果能够满足生产精度要求,经21名生产人员的测评,相比于全人工作业,变化发现环节耗时减少47.36%,极大地提高了人工生产作业效率,为实用场景下自动化算法服务于变化检测提供了可行方案。同时,随着技术发展,预计未来在保证生产精度的前提下,不变掩膜的压盖幅度将不断增加,从而进一步提高生产作业的效率。
图8
图8 不变掩膜格网化结果示例
Fig.8 Example of changeless mask gridding results
4 总结与展望
本文通过分析现有变化检测算法在实际应用中存在的不足,逆向思考,提出不变检测的技术框架。基于辨析和揭示地表覆盖类别「变」与「不变」的本质特征,确立不变检测的概念,确定不变检测流程,提出不变区域检测成果的评价指标。此外,本文提出了不变检测样本库构建、不变检测技术方法、成果输出与评价的方法和实现思路。通过不变检测思想,将变化信息提取从变化检测一步走分解为「不变区域自动检测+可能变化区域人工解译」两步走,从而在保证精度的同时大幅减少人工目视判读工作量,显著提升提取效率,为智能化技术服务于自然资源地表覆盖要素更新提供思路。
在未来的研究中,不变检测还有望在以下几个方面展现出更强的生命力:①样本库的发展。不变检测技术的发展离不开样本的支撑,未来将建立更加完善的不变检测样本库。②不变检测模型的发展。直推式影像回归模型目前还处于探索阶段,知识与影像分类方法的结合也正在发展,未来将不断突破。③不变检测应用前景。随着遥感、人工智能、大数据等学科的发展和应用领域的拓展,不变检测技术将广泛应用于各类自然资源监测场景,同时朝着智能化、自动化方向发展。
初审:张 琳
复审:宋启凡
终审:金 君
资讯











