用于建筑施工现场管理的超宽带定位系统
目录
- 简介
- 超宽带地理定位系统
- 建筑工地中的 UWB 位置跟踪
- 主动危险检测
- 实时工作进度跟踪
- 总体设计指南
- 结论
【注:前2章介绍UWB超宽带,侧重技术;如您更关注它在建筑业内的应用,可以直接跳至第3或第4章(不过本文全文稍偏技术性 )】

【续前文】
5. 实时工作进度跟踪
建筑施工是一个信息密集的过程,很容易造成管理组织的信息过载。 信息检索中浪费的时间、不良且复杂的信息结构以及延迟的沟通,可能会阻碍有效的管理。 用于改进信息管理和项目绩效自动控制的嵌入式 ICT 系统目前是建设项目管理的最前沿。 通过实时收集低级现场数据(例如工人、材料和设施的位置),并将其输入到模式和过程识别算法中,这些系统有望支持进度控制和偏差分析,提高人类管理大型复杂工作流程数据集的能力。
过去的实验表明,如果准确度误差低于 20%,则可以使用对工人的跟踪以及与项目基线的比较,可用来评估正在进行的活动和相关的初步原型。 将这一概念扩展到自动化活动进度监控,在土方控制、供应管理、道路建设领域都成功结果的报告。 卡博纳里(Carbonari)等人认为,UWB 位置跟踪数据可以有效地应用于自动化工作采样。 事实上,位置跟踪数据可用于分解不同工作区域中工人和设备随时间的存在情况,以及与工人和材料的轨迹相关的情况,原则上可用于论证工作进度。
然后需要强大的定制设计模式识别算法来从原始跟踪数据中提取活动类型和强度,同样,这仍然是一个开放的研究领域。 为了演示如何将 UWB 应用于工程进度估算,请考虑以下示例,摘录自卡博纳里(Carbonari)在钢筋混凝土框架公寓楼施工期间所领导的建筑工程跟踪活动。 图11是施工现场的一些照片,图12是大楼一层的详细布局。 现场浇筑混凝土板安装是所示的监测活动。

图 11:UWB 工作流程跟踪实验图片:施工现场设置 (a)、脚手架中的接收器安装 (b) 和浇筑阶段 (c)
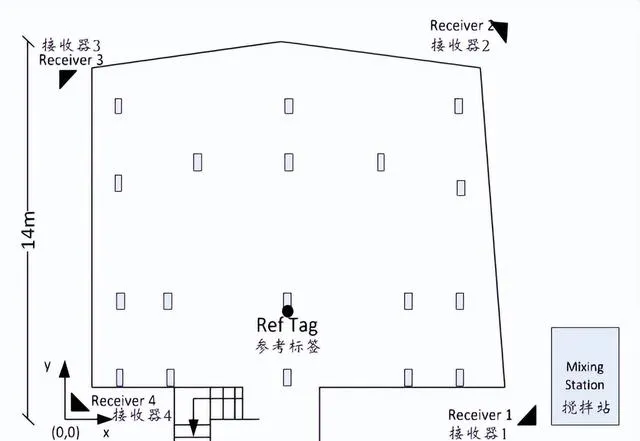
图 12:UWB 工作流程跟踪实验的现场实验照片和工厂布局
三分之一的机组成员致力于这项任务; 两名在现场浇筑混凝土板工作,一名控制起重机轨迹。 起重机将起重机铲斗从大约放置在参考位置 (15,0) 的混凝土搅拌站移动到当前混凝土浇注位置,由两名工人中的一名负责操作,而另一名工人则水平并振动液态混凝土浇筑。 图13显示了起重机铲斗X和Y坐标时间进度。 可以清楚地看出,x=15 峰值对应于 y=0 谷值,并且该模式最初在 x=0 坐标附近出现约七次,并且 y 坐标呈增加趋势。 这很容易想象为代表第一条混凝土浇注带,对应于实际发生的地板的最左侧。 然后工作按照类似的趋势进行,直到起重机铲斗停在施工现场的搅拌站区域。
图 14 显示了工人在板上的位置。 即使在这种情况下,也可以清楚地看到当起重机铲斗位于浇筑板时,工人的位置如何准确地跟随起重机铲斗的位置。 事实上,工人的职责是在本地引导铲斗,以便在浇注阶段使混凝土尽可能均匀地分布。 这是由 UWB 跟踪系统正确且准确表示的活动约束。 最后,通过识别 x=15m 处的起重机位置峰值,可以轻松计算倾倒的铲斗数量,从而实现非常准确的工作进度记录。
总而言之,对简单施工任务的UWB跟踪所拟议的快照表明,可以通过工人、材料和设备的轨迹清楚地识别活动模式。从唯一标签标识符中获得的身份信息,以及可以直接与工作流基线绘制的关系,为在建筑设施中实施先进的工作进度跟踪系统提供了非常好的和可靠的基础。
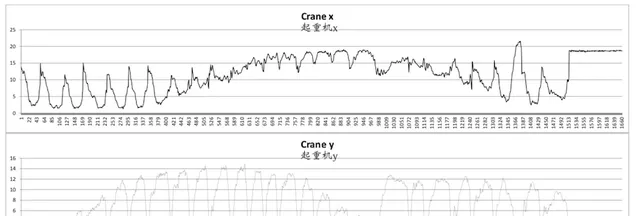
图13:起重机铲斗X、Y坐标的时间进度。

图 14:浇筑工人 X 和 Y 坐标的时间进度
【未完待续】

农历癸卯腊月廿七
2024.2.6
【部分图片来源网络,侵删】











