引用格式
范铭铄, 周平, 李淼, 李华龙, 刘先旺, 麻之润. 羊场自动导航喷药机器人设计与实验[J]. 智慧农业(中英文), 2024, 6(4): 103-115.
Citation:FAN Mingshuo, ZHOU Ping, LI Miao, LI Hualong, LIU Xianwang, MA Zhirun. Automatic Navigation and Spraying Robot in Sheep Farm[J]. Smart Agriculture, 2024, 6(4): 103-115.
官网全文免费阅读
知网阅读
羊场自动导航喷药机器人设计与实验
范铭铄 1,2 , 周平 2 , 李淼 2* , 李华龙 2 , 刘先旺 2 , 麻之润 2
(1.中国科学技术大学 研究生院科学岛分院,安徽合肥 230026,中国;2.中国科学院合肥物质科学研究院 智能机械研究所,安徽合肥 230031,中国)
摘要: [目的/意义] 大规模肉羊畜舍人工消毒存在费时费力、覆盖不全和消毒不彻底的问题,为保持畜舍卫生和肉羊健康,本研究提出一种羊场自动导航喷药机器人。
[方法] 从硬件、语义分割模型和控制算法3个方面设计了自动导航喷药机器人。硬件部分包括履带底盘、摄像头和折叠式喷药装置。语义分割模型部分通过引入压缩通道网络注意力(Squeeze-and-Excitation Network, SENet)和基于场景改进的十字交叉注意力(Criss-Cross Attention,CCA)模块,提出一种双注意力ENet语义分割模型(Double Attention ENet, DAENet)。在控制算法方面,针对机器人在面对岔路时无法控制行进方向的问题,利用模拟真实道路的方法,在羊舍外的道路上绘出车道线,提出了道路中心点识别和车道线中心点识别两种算法来计算机器人行进过程中的导航点。为了实现上述两种算法,使用了两台摄像头并设计了摄像头切换算法,依靠此算法实现两台摄像头的切换,并控制喷药装置的开关;提出了一种偏移量与速度计算算法控制机器人履带左右轮速度,实现对于机器人行走的控制。
[结果和讨论] DAENet模型在图像分割任务中的平均交并比(Mean Interp over Union, mIoU)达到了0.945 3;摄像头切换算法测试结果表明摄像头的切换时间在15 s以内,机器人能正确、快速地带动喷药装置的开关;中心点与偏移量计算算法测试的结果表明,在处理多帧视频流时,算法平均处理一帧图片所用的时间为0.04~0.055 s,帧率为20~24 f/s,满足实际工作的实时性要求;羊场实地的整体测试结果表明,机器人完成了两个羊舍的自动导航和消毒任务,并且未碰撞路边料槽,行进轨迹偏移量未超过0.3 m。在0.2 m/s的行进速度下,药箱里的药液能够满足两个羊舍的消毒任务。机器人处理图像的平均帧率为22.4 f/s,对于信息处理的准确性和实时性能够满足实验指标要求。喷药覆盖圈舍地面超过90%,满足实验指标要求。
[结论] 本研究提出的羊舍自动导航喷药机器人以语义分割模型DAENet为基础,中心点识别算法为核心,通过与硬件设计和控制算法的相互配合,能够在确保安全性和实时性的前提下,实现在羊舍内的自动导航和全覆盖喷药。
关键词: 自动导航;喷药机器人;计算机视觉;语义分割;注意力模块;中心点计算;DAENet
文章图片

图1 羊场自动导航喷药机器人底盘
Fig. 1 Chassis of the automatic robot working in sheep farm
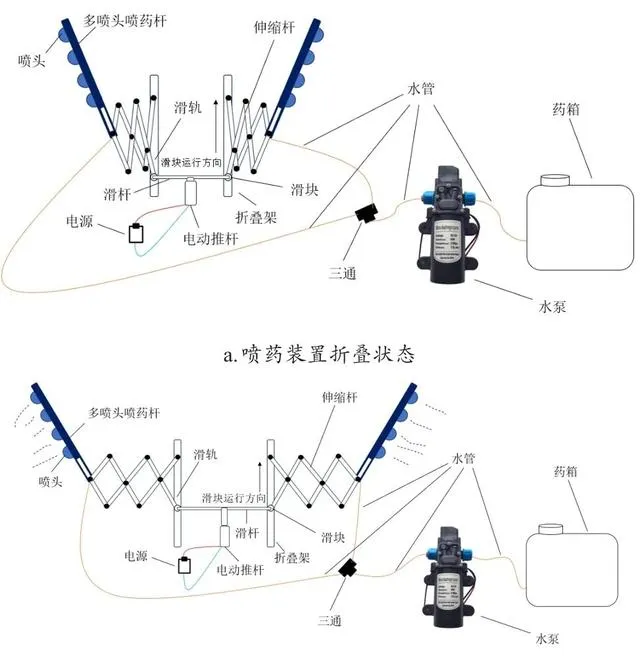
图2 羊舍自动导航喷药机器人的喷药装置
Fig. 2 The spraying device of the sheep shed automatic navigation spraying robot

图3 羊舍自动导航喷药机器人整体结构设计
Fig. 3 The overall structural design of the sheep shed automatic navigation spraying robot
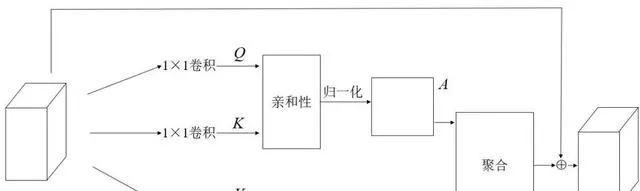
图4 CCA的网络结构
Fig. 4 The network structure of CCA
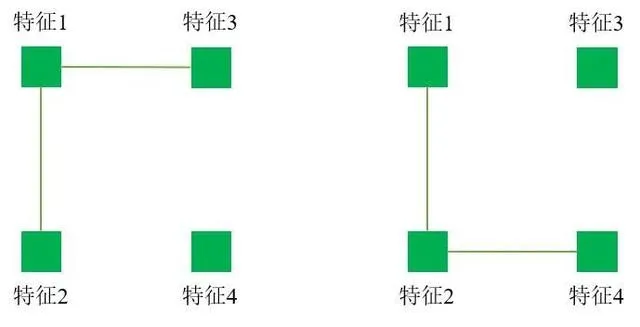
图5 RCCA级联结构
Fig. 5 RCCA cascade structure
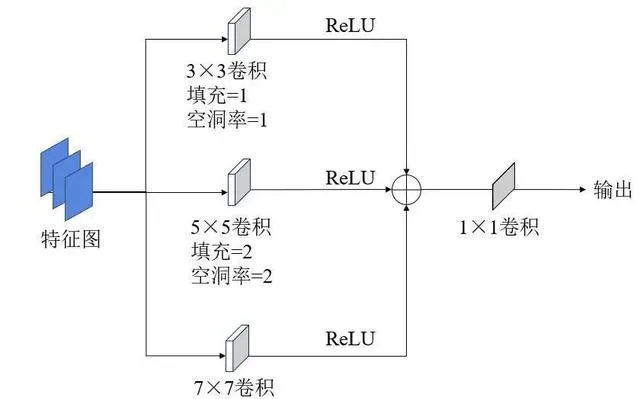
图6 CCM的网络结构
Fig. 6 The network structure of context convolution module
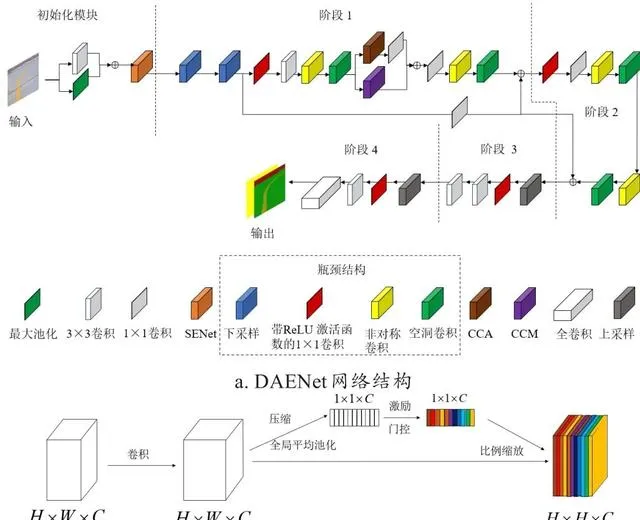
图7 基于双注意力机制的ENet模型
Fig. 7 ENet model based on dual attention
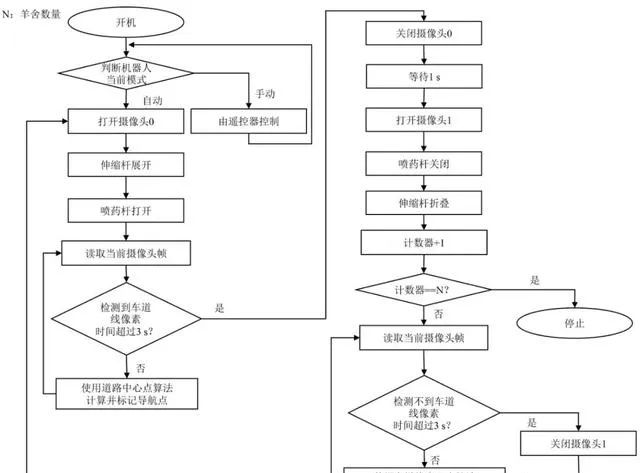
图8 羊舍自动导航喷药机器人系统的工作流程
Fig. 8 The workflow of the sheep shed automatic navigation spraying robot system
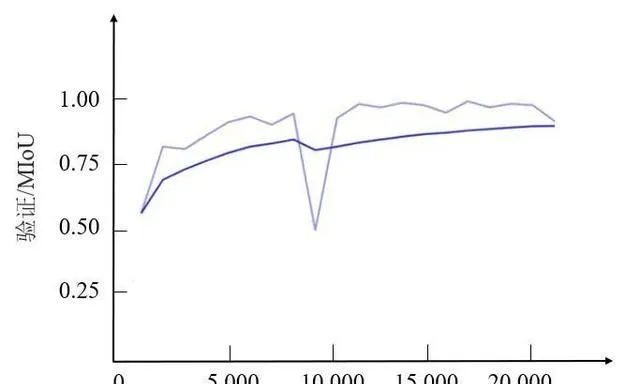
图9 DAENet模型训练过程中的mIoU
Fig. 9 mIoU during training process of DAENet model
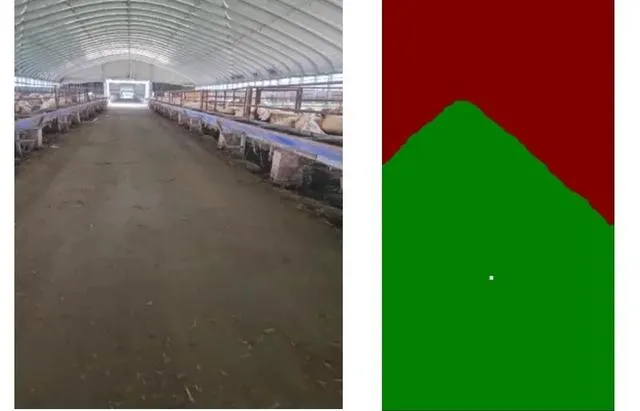
图10 羊舍内道路中心点计算图像
Fig. 10 Image for calculating the center points of roads inside the sheep shed
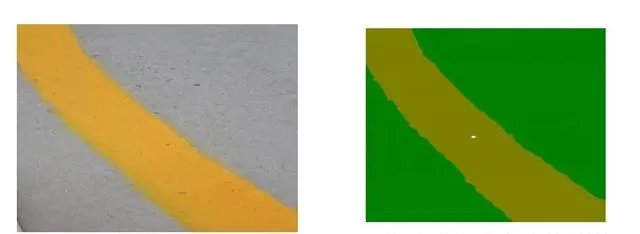
图11 羊舍外车道线中心点计算图像
Fig. 11 Image for calculating the center points of lane lines outside the sheep shed
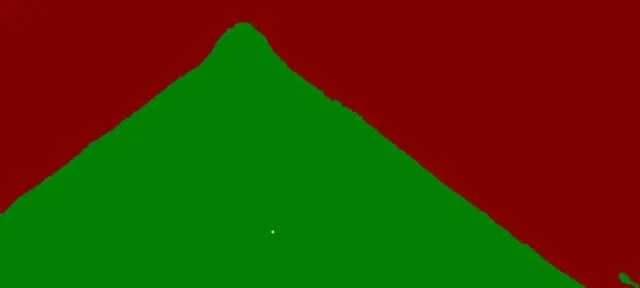
图12 羊舍道路分割结果
Fig. 12 Results of road segmentation in the sheep shed

图13 羊舍自动导航喷药机器人的测试环境
Fig. 13 Test environment for sheep shed automatic navigation spraying robot

图14 自动导航喷药机器人实验过程
Fig. 14 Automatic navigation and spraying robot during test

图15 羊舍自动导航喷药机器人的喷药效果
Fig. 15 Spraying effectiveness of the sheep shed automatic
navigation spraying robot
作者介绍

李淼 研究员
李淼,中国科学院合肥物质科学研究院智能机械研究所 研究员, 80年代开始从事人工智能和农业知识工程的研究工作,90年代主持开发的「智能化农业软件开发环境」应用于国家863「智能化农业信息技术应用示范工程」—云南、甘肃、四川示范区取得很好的经济效益和社会效益。推动了我国智能化农业信息技术研究与应用的发展。目前带领研究团队开展智能农机装备方面的科研工作。
曾获国家科技进步二等奖2次,中科院科技进步二等奖1次,甘肃省科技进步奖一等奖1次,云南省科技进步二等奖1次。获国务院政府津贴、第四届中国科学院十大女杰奖。承担国家自然科学基金、国家863计划、国家科技攻关重大专项、中国科学院创新工程等科研项目23项。培养博士、硕士研究生72名,SCI、ISTP、EI、核心期刊上发表论文138篇;合著专著1部;获得发明专利8项,申请发明专利21项;软件著作权86项。
来源:【智慧农业(中英文)】2024年第4期
转载请联系编辑部授权
本期支持单位
潍柴雷沃智慧农业科技股份有限公司
欢迎访问期刊元宇宙空间

智慧农业微信交流服务群
为方便农业科学领域读者、作者和审稿专家学术交流,促进智慧农业发展,为更好地服务广大读者、作者和审稿人,编辑部建立了微信交流服务群,有关专业领域内的问题讨论、投稿相关的问题均可在群里咨询。 入群方法: 加小编微信 331760296 , 备注: 姓名、单位、研究方向 ,小编拉您进群,机构营销广告人员勿扰。

发布征集

欢迎在我公众号发布科研团队介绍、创新科研成果及相关活动等信息。