以下內容來自 小六的機器人SLAM學習圈( 6年積累,全國最大的機器人SLAM交流社區,為SLAM行業從業者提供從入門、學習、交流、求職、線下連結、合作、咨詢、答疑等一系列的服務 ) 知識星球每日更新內容
#論文 T-RO 2024 | 牛津大學釋出「利用無標簽數據的不確定性估計消減語意分割中的分布偏移」
【Mitigating Distributional Shift in Semantic Segmentation via Uncertainty Estimation from Unlabelled Data】
文章連結: [2402.17653] Mitigating Distributional Shift in Se...
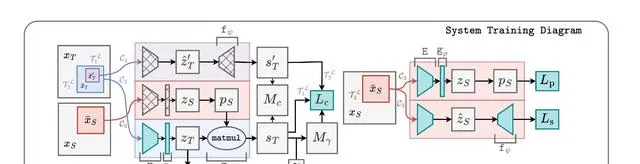
知道一個訓練好的分割模型何時遇到與它的訓練數據不同的數據是很重要的。從效能和保證的角度理解和減輕這種影響在其套用中起著重要的作用- -這是在自動駕駛汽車( AVs )等套用中的安全問題。這項工作提出了一種分割網絡,它可以在單次前向傳遞中檢測由挑戰性測試域引起的錯誤,而無需任何額外的註釋。由於標註成本限制了標註數據集的多樣性,我們使用容易獲得的、未精確化和未標註的數據,透過選擇性地加強數據增強的一致性來學習執行不確定性估計。
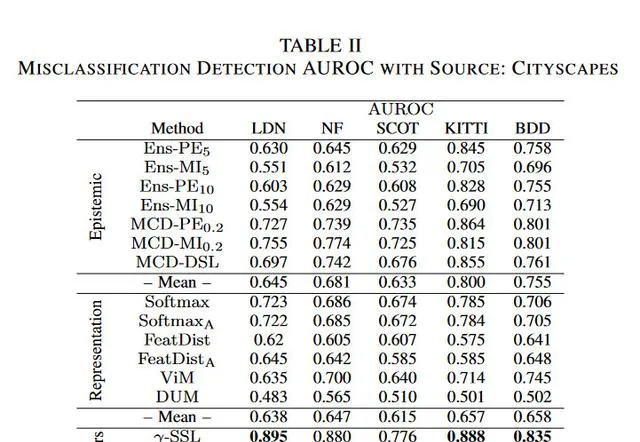
為此,使用了一種基於SAX數據集的新的分割基準,該基準包括跨越三個自動駕駛領域的標記測試數據,其外觀範圍從密集的城市到越野。本文提出的方法γ - SSL在這一困難的基準上一致優於不確定性估計和OoD分布外技術- -在三種場景中最具挑戰性的情況下,在接收者操作特性( ROC )曲線下面積高達10.7 %,在精確-召回( PR )曲線下面積高達19.2 %。


以上內容來自 小六的機器人SLAM學習圈 ( 6年積累,全國最大的機器人SLAM交流社區,為SLAM行業從業者提供從入門、學習、交流、求職、線下連結、合作、咨詢、答疑等一系列的服務 ) 知識星球每日更新內容
推薦教程
深度學習特征聯合ORB-SLAM3,工程級長期SLAM穩到飛起!3D高斯潑濺 為什麽能一直火?有哪些套用場景?香港大學開源的這個激光雷達慣性SLAM,太強了!一招掌握3DGS基礎視覺三維重建!深度計算+點雲處理+網格重建最佳化+紋理貼圖!谷歌這個SLAM開源方案,造福了整個機器人行業!重大變革!NeRF和3D高斯噴濺如何重塑SLAM?發頂會頂刊不再難!多傳感器融合SLAM、生成式AI、3DGS、NeRF、標定等方向這個開源框架,造福了無數衛星定位研究者和初創公司!BOSS:用了機器人仿真,立省幾十萬自動駕駛中的GNSS、RTK到底多重要?太強了!世界第一款開源的自動駕駛一體化框架Autoware!(附交流群)如何從零開始搭一套自己的SLAM系統?17講全部上線!全網首個詳解深度學習特征開源演算法SuperPoint和SuperGlue(附交流群)最炸裂的機器人AI技術教程都在這了!











