疾速奔跑的獵豹和靈活攀巖的山羊等均表現出卓越的運動能力,如何學習動物的運動機理,輔助人類在非結構化環境中開展作業成為研究熱點。四足機器人應運而生,依靠其離散的落足點,進而可適應多種地形,被廣泛套用於地形勘探、城市作戰、物資運輸等領域。其中,液壓四足機器人憑借其出色的大負載搬運能力,在諸多場合備受重視。肢腿單元作為機器人基本的運動單元,直接決定機器人的動態效能。
受獵豹等生物的骨骼肌肉系統的啟發,浙江大學機械工程學院張軍輝、縱懷誌等學者組成的研究團隊設計了一款高度整合、輕量化的伺服液壓執行器, 利用金屬增材制造技術,實作整合多元件介面和內嵌流道的缸筒設計。

© 3D科學谷白皮書

論文連結:
https://link.springer.com/article/10.1007/s42242-023-00256-0
研究團隊針對活塞桿直接出力、異形結構難以開展 輕量化設計 的難題,創新提出 混合晶格概念 ,將混合晶格結構填充在活塞桿中部,用客製的晶格結構替換更大的中空區域,實作效能客製。利用變密度懲罰法對大、小腿結構件進行拓撲最佳化,去除應力較小區域的冗余材料。最佳化後的肢腿單元質素降低了24.5%,最佳化後的肢腿單元表現出更好的動態效能:隨著運動頻率的增加,呈現出色的軌跡跟蹤效果。該研究為液壓足式機器人的輕量化設計和輕量化後的動態效能量化評價提供參考。
圖文概要
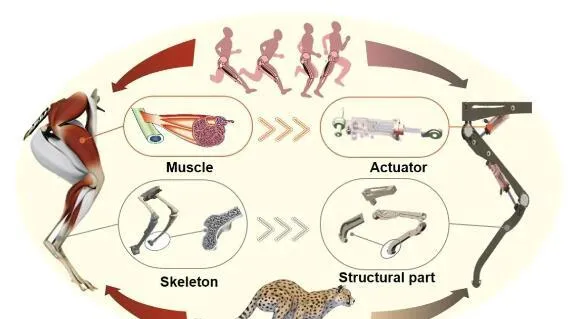
圖1 足式機器人肢腿單元的仿生輕量化設計
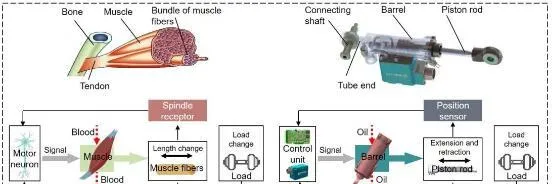
圖2 液壓執行器的仿生設計
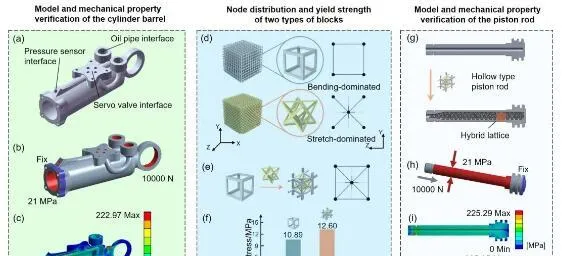
圖3 缸筒和活塞桿的建模和力學效能驗證。(a) 缸筒模型;(b) 缸筒受力分析;(c) 缸筒有限元分析;(d) 單一晶格結構;(e) 混合晶格單元;(f) 0.1體積比下的晶格屈服強度;(g) 活塞桿模型;(h) 活塞桿受力分析;(i) 活塞桿有限元分析
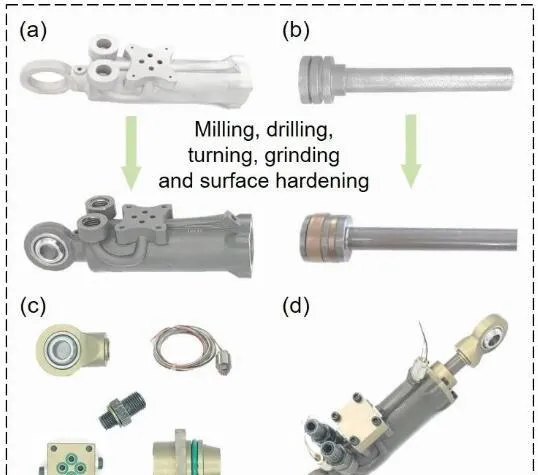
圖4 液壓執行器制造。(a) 缸筒實物圖;(b) 活塞桿實物圖;(c) 執行器輔件;(d) 高度整合的液壓執行器
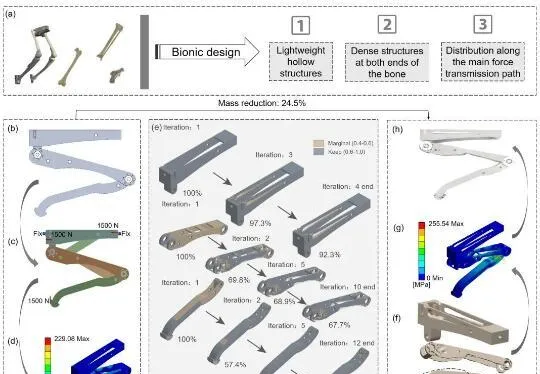
圖5 肢腿單元結構件的最佳化流程。(a) 骨骼結構特征;(b) 原始模型;(c) 受力分析;(d) 最佳化前的有限元仿真結果;(e) 拓撲最佳化過程;(f) 最佳化後的模型;(g) 最佳化後模型的有限元仿真結果;(h) 拓撲最佳化後的結構件實物圖

圖6 不同頻率下的足端軌跡跟蹤效果。(a) 最佳化前;(b) 最佳化後
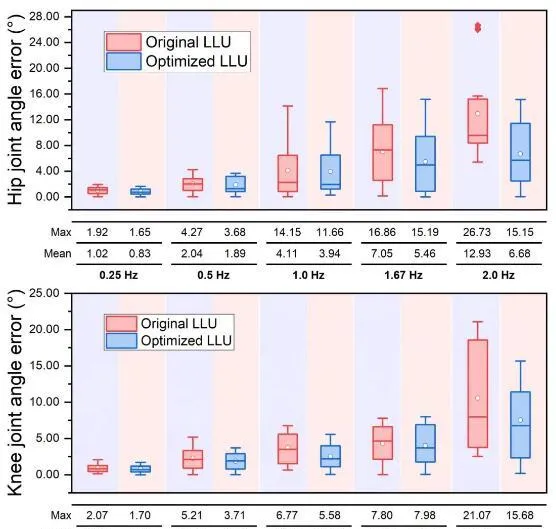
圖7 不同頻率下的髖、膝關節跟蹤誤差
論文套用資訊:
Zong H, Zhang J, Jiang L, et al., 2023. Bionic lightweight design of limb leg units for hydraulic quadruped robots by additive manufacturing and topology optimization. Bio-des Manuf (Early Access). https://doi.org/10.1007/s42242-023-00256-0
l 谷專欄 l
網站投稿 l 發送至[email protected]











