在電影【機器人之夢】的開頭,主角被電視廣告上的「ARE YOU ALONE?」打動,購入了一款陪伴自己的人形機器人,他們一起玩遊戲、聽音樂、逛街吃飯,甚至擦出愛的火花……你是否想象過【機器人之夢】中與機器人相愛的場景發生在現實世界?

電影【機器人之夢】截圖 圖片來源:網絡
2024年的人形機器人熱,讓人類的想象力又往現實靠近了一步。面對精彩紛呈的產品,不少人驚呼,2024年是人形機器人產業爆發的「元年」。
資本市場的反應也印證了這一點: 在投資人紛紛清倉輝達的同時,人形機器人的融資卻如火如荼。 據CIC灼識咨詢的不完全統計,2024年以來,國內的人形機器人企業星動紀元、宇樹科技、智源機器人、月泉仿生、加速前進演化、星塵智能、逐際動力等都獲得融資,美國的人形機器人企業Figure AI、Physical Intelligence、Skild AI、The Bot Company、NEO等也紛紛受到投資人的青睞。CIC灼識咨詢嘗試梳理人形機器人的前世今生,與市場共同走近這一熱門產業。
人形機器人不是今天才有,為何近兩年熱潮再起?這要從與之相關的人工智能大模型技術進步講起。大模型技術的泛化性,使得產業界看到了人形機器人走向具身智能的希望。此前專用領域的機器人,如工業、掃地、除草等等領域的機器人已有所發展,但都不具備通用能力。由於現實世界的大多數設施按照人類的習慣來構建,人形的機器人最容易模仿人類形成多場景下的通用能力。 大模型的技術突破,為人形機器人的商業化和規模化套用開啟了新的大門。
半個多世紀以來,人形機器人的發展從未間斷,回顧世界範圍內不同時期的代表性產品,有助於我們理解人形機器人的演進方向。技術路線上「通用-專用」,驅動系統上「液壓-電氣」,基本勾勒出了半個世紀以來人形機器人的發展路線。
第一波對人形機器人的關註,肇始於1972年早稻田大學研發的WABOT-1。早稻田大學官網資訊顯示,WABOT-1是世界上第一個全尺寸的人形機器人,由肢體控制系統、視覺系統和對話系統組成,能夠使用日語與人交流,透過外部感受器、人工耳朵和眼睛以及人工嘴巴來測量物體的距離和方向,使用觸覺傳感器的手來抓取和搬運物體。WABOT-1設計的初衷是建立一個通用性的多功能機器人,囿於當時各方面的技術條件,在80年代叠代到WABOT-2時,早稻田大學的研究轉向了對人形機器人專門功能的研究,技術路線從「通用」轉向了「專用」。
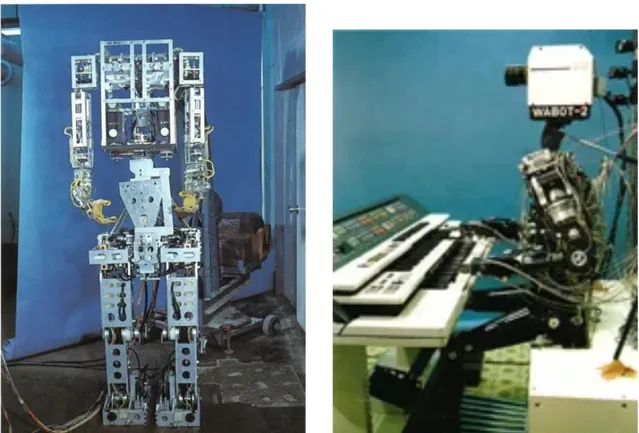
WABOT-1(左)設計的初衷是為了達到通用性
WABOT-2(右)則被期待成為音樂方面的「專家」
圖片來源:早稻田大學官網
在WABOT-2推出的同一時期,本田公司開始了對機器人雙足行走的研究,幾番叠代後,於2000年推出了明星人形機器人ASIMO。在技術不斷完善的過程中,ASIMO機器人持續解鎖跑步、踢球、搬運物體、上下樓梯等功能。但在2018年,本田終止了對ASIMO的繼續研究。外界分析稱,隨著時間推移,對於人形機器人的研究成本越來越高,本田一直未找到ASIMO與公司主營業務的契合點。商業化前景不明朗的前提下,ASIMO更多地被視為技術展示而非實際套用的產品。
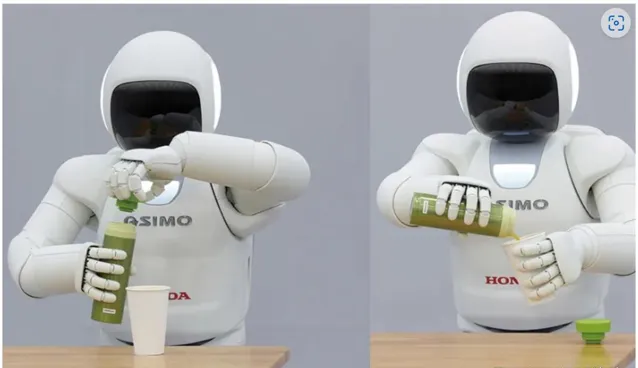
ASIMO正在端茶倒水 圖片來源:本田官網
但是,ASIMO為本田後續的研發提供了大量技術積累。據官網資訊,2021年9月,長期從事ASIMO等通用型人形機器人研究的本田,轉向研究分身機器人(Avatar Robot),註重「腳的技術」、「手的技術」等單項功能的研究,希望首先透過它的某一項能力,盡快為社會提供價值。這一轉變再次印證了人形機器人領域「通用-專用」的技術路線。
大洋彼岸的波士頓動力公司,於2013年推出了人形機器人領域的代表性產品Atlas,這款人形機器人具備比如奔跑、跳躍、後空翻和搬運等各種功能,其對各種環境的適應力和平衡性一直是同類機器人中的翹楚。然而,隨著技術的不斷進步和更新換代的需求,Atlas在2024年宣布停止開發。波士頓動力為Atlas釋出的告別影片中,展示了其在遭受撞擊時液壓系統漏油的畫面,這也似乎預示著Atlas被淘汰的真正原因。

Atlas遭遇碰撞時漏油的畫面
圖片來源:Farewell to HD Atlas影片截圖
在液壓系統版Atlas退役的第二天,粉絲們還沈浸在傷感中時,它又「復活」了,這一次的Atlas搭載著全新電動系統。
電動版Atlas「復活」
圖片來源:All New Atlas影片截圖
特斯拉的人形機器人Optimus、小米的「鐵大」以及國內眾多人形機器人廠商,大都選用了電驅動系統,隨著波士頓動力的加入,這一驅動系統已經成為主流路線。
在新一輪的人形機器人熱潮中,特斯拉本身在自動駕駛領域的軟硬件積累,使得Optimus幾乎代表了最先進的技術路線,引領著人形機器人的發展方向。目前Optimus已經「進廠打工」,綜合市場上其他的人形機器人產品我們可以判斷,當下人形機器人的技術方向仍舊在「專用」路線。隨著軟硬件技術的進步,人形機器人將更加智能化和自主化,能夠理解復雜指令,適應不斷變化的環境,並在沒有人類直接幹預的情況下執行復雜任務,即走向最終的「通用」目標:具身智能。
在2024年的世界人工智能大會上,人形機器人"十八金剛"賺足了眼球。這預示著人形機器人在人工智能的加持下向前邁了一大步,同時引發了市場對人形機器人大規模商用潛力的深入探討。

2024年世界人工智能大會人形機器人「十八金剛」
圖片來源:央視新聞
目前,人形機器人的高成本是其大規模商用面臨的主要障礙。 制造人形機器人需要眾多高精尖的硬件:高效能的伺服系統、減速器、傳感器和控制器等核心零部件。這些硬件的成本占據了相當大的比例,且不受產業鏈中遊機器人本體和系統整合商的直接控制。因此,目前市面上的人形機器人普遍價格昂貴,低則十余萬,高則百萬元以上。
價格因素還導致目前人形機器人套用場景集中在B端。根據國內相關上市公司披露的數據,學校及科研機構、物流等行業占據人形機器人產品營收的大頭,消費級人形機器人市場剛剛嶄露頭角。特斯拉的Optimus目前的套用也是「進廠打工」,尚未進入普通消費者的生活。
從今年的世界人工智能大會來看,人形機器人在B端的套用仍在擴充套件,從最初的工業自動化領域逐步滲透到教育、服務業等多個領域,一些C端家用的機器人也已經出現。可以說, 誰先解決了成本和價格問題,就占領了機器人大規模商用的先機。
技術創新是推動人形機器人發展的關鍵。人工智能技術,尤其是大模型技術,正在提升人形機器人的智能水平。人形機器人走向具身智能,決策時要呼叫視覺、聽覺和觸覺等多重感官。這就意味著, 人形機器人不僅要擁有感知和認知能力,還要有與物理世界互動的能力,以便達到決策後的精確執行。
當前,大模型技術在資訊處理領域取得了顯著進展,但在人形機器人的認知能力、環境模擬和適應現實物理環境方面,其潛力尚未得到充分挖掘,這些能力對於實作人形機器人的具身智能至關重要。
此外, 大模型的訓練方法目前主要依賴於大量結構化數據集,現實物理世界中卻存在大量的非結構化數據。 有實驗就發現,在充滿非結構化數據的物理環境中,同樣一件物品換一個擺放的位置,人形機器人就有可能無法完成指定任務。可以說,單純結構化數據的訓練限制了人形機器人的自主學習能力,使得其當前的遷移和反思能力不盡人意。理想的具身智能系統應能夠從經驗中學習,透過與環境的互動不斷最佳化其行為和決策過程。
因此我們可以看到, 工業和資訊化部釋出的【人形機器人創新指導意見】強調了以人工智能技術突破為引領的重要性。該指導意見提出了在人形機器人的"大腦"、"小腦"、"肢體"等關鍵技術領域取得突破的目標,並鼓勵構建完善的技術創新體系,支持產學研用聯合體,探索跨學科、跨領域的創新模式。 所謂「大腦」,即是人形機器人的環境感知、行為控制、人機互動能力,「小腦」為運動控制演算法庫,網絡控制系統架構等技術。「肢體」即為目前占據大部份成本的關鍵核心零部件。
在人形機器人未來的發展路線上,仍存在著諸如人形機器人是否必須是人形,人形機器人到底是否需要通用智能,以及究竟是軟件適配硬件還是硬件適配軟件等等爭論。如果說,大模型的熱潮帶動了市場對人形機器人的未來憧憬,那麽人形機器人的軟硬件交叉性,決定了憧憬變為現實的使命,需要多個學科和產業合力完成。走向科幻情節中的人機共生時代,還有很長一段路要走, 這條路上雖荊棘叢生,但同樣商機無限。












